4.3主观Bayes方法(empirical Bayesian approach)
4.3.1 知识不确定性的表示
4.3.2 证据不确定性的表示
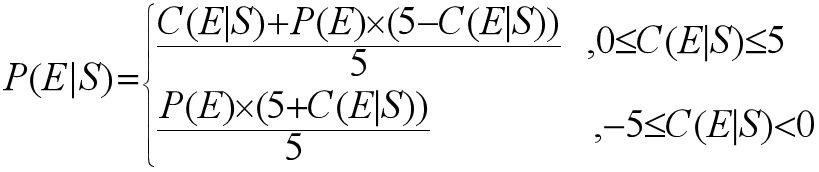
在主观Bayes方法中,证据的不确定性也用概率表示。对于证据E,由用户根据观察S给出P(E|S),即动态强度。 由于主观给定P(E|S)有所困难,所以实际中可以用可信度C(E|S)代替P(E|S)。例如在PROSPECTOR中C(E|S)和P(E|S)遵从如下关系
4.3.3 组合证据不确定性的算法
1.多个单一证据的合取: E=E1 AND E2 AND … AND En
则组合证据的概率:P(E|S)=min{P(E1|S),P(E2|S),…,P(En|S)}
2.多个单一证据的析取: E=E1 OR E2 OR … OR En
则组合证据的概率:P(E|S)=max{P(E1|S),P(E2|S),…,P(En|S)}
3.非运算: P(¬E|S)=1-P(E|S)
4.3.4 不确定性传递算法
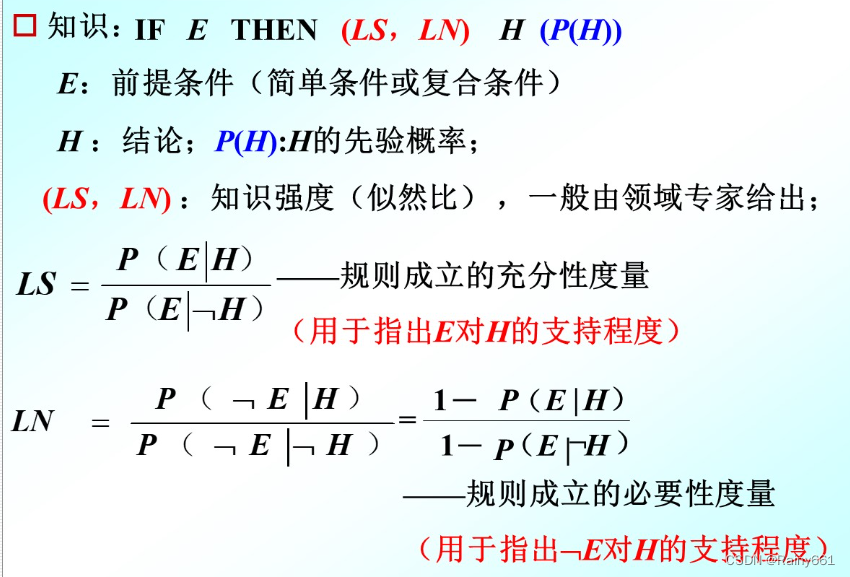
主观Bayes方法推理的任务:根据证据E的概率P(E)及LS、LN的值,把H的先验概率P(H)更新为后验概率P(H|E)或P(H|¬E)。即

确定后验概率的方法随着证据肯定存在,肯定不存在,或者不确定而有所不同。
-
证据肯定存在时
引入几率函数Θ(x),它与概率的关系为: Θ(x)=P(x)/(1-P(x)), P(x)=Θ(x)/(1+Θ(x)) 在证据肯定存在时,P(E)=P(E|S)=1。
由Bayes公式得: P(H|E)=P(E|H)×P(H)/P(E) (1)P(¬H|E)=P(E|¬H)×P(¬H)/P(E) (2)(1)式除以(2)式得: P(H|E)/P(¬H|E)=P(E|H)/P(E|¬H)×P(H)/P(¬H)
由LS和几率函数的定义得: Θ(H|E)=LS×Θ(H) 即 P(H|E)=LS×P(H) / [(LS-1)×P(H)+1] -
证据肯定不存在时
在证据肯定不存在时,P(E)=P(E|S)=0, P(¬E)=1。
由Bayes公式得: P(H|¬E)=P(¬E|H)×P(H)/P(¬E) (1)P(¬H|¬E)=P(¬E|¬H)×P(¬H)/P(¬E) (2)(1)式除以(2)式得: P(H|¬E)/P(¬H|¬E)=P(¬E|H)/P(¬E|¬H)×P(H)/P(¬H)
由LN和几率函数的定义得: Θ(H|¬E)=LN×Θ(H) 即 P(H|¬E)=LN×P(H) / [(LN-1)×P(H)+1]
-
证据不确定时
当0<P(E|S)<1时,应该用杜达等人1976年证明的下述公式计算后验概率P(H|S):
P(H|S)=P(H|E)×P(E|S)+P(H|¬E)×P(¬E|S)
当P(E|S)=1时,证据肯定存在。
当P(E|S)=0时,证据肯定不存在。
当P(E|S)=P(E)时,证据E与观察S无关。由全概率公式得: P(H|S)=P(H|E)×P(E)+P(H|¬E)×P(¬E)=P(H)
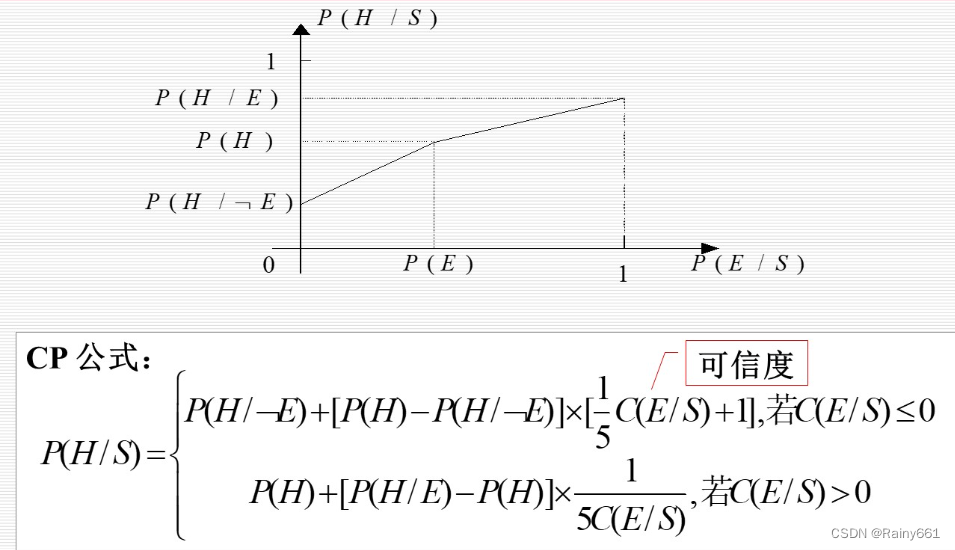
当P(E|S)为其它值时,通过分段线性插值计算P(H|S),即

4.3.5 结论不确定性的合成算法
所有的知识规则连成一个有向图,图中的节点代表假设结论弧则代表规则,每条弧对应两个数值(LSLN),用来度量规则成立的充分性和必要性;这样的有向图称为推理网络
-
推理网络把一些证据和一些重要的假设结论连接起来
-
叶子节点是向用户提问获取的证据,其它节点就是结论假设
-
每个结论先附上一个先验概率PH推理网络的连接就是测定个结论的概率变化如何影响其它结论
主观BAYES方法的特点
优点:
具有较坚实的理论基础。
知识的静态强度LS及LN是由领域专家给出,推出的结论有较准确的确定性。
主观Bayes方法不仅给出了证据肯定存在、肯定不存在时更新后验概率的方法,还给出了证据不确定时的方法,实现了不确定性的逐级传递。
缺点:
它要求领域专家在给出知识时,同时给出H的先验概率P(H),这比较困难。
Bayes定理要求事件间独立,使其应用受限制。
求得先验概率的方法主要包括
(1)根据大量试验样本分布得出的试验概率
(2)利用等可能性事件概率相等的原则得出的古典概率
(3)基于人的主观感觉得出的主观概率,当没有任何先验信息时,可以将各可能事件的先验概率设为相等的“不区分原则”等等
4.4 可信度方法
口1975年斯坦福大学的肖特里菲(E.HShortliffe)等人在确定性理论(theory ofconfirmation)的基础上,结合概率论等提出的一种不确定性推理方法。在血液病诊断专家系统MYCIN中得到了很好的应用。
口 优点:直观、简单,且效果好
4.4.1 可信度的概念
可信度:根据经验对一个事物或现象为真的相
信程度。
可信度带有较大的主观性和经验性,其准确性难以把握。
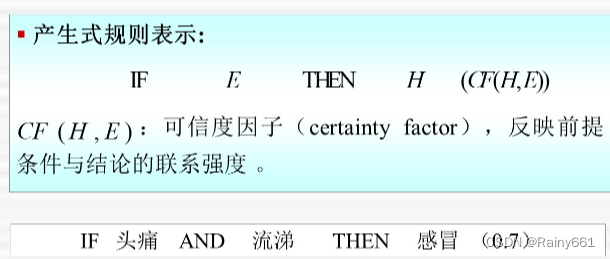
C一F(Certainty Factor)模型:基于可信度表示的不确定性推理的基本方法。
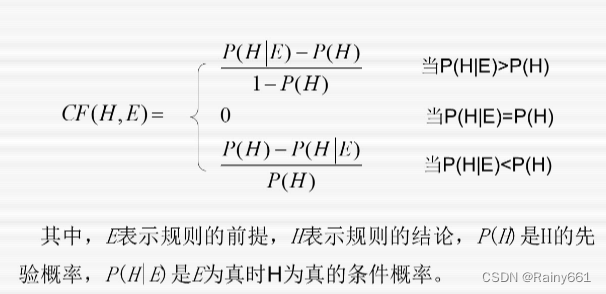
4.4.2 C-F概念
CF是由 MB(信任增长度) 和MD(不信任增长度)相减而来
即 C F ( H , E ) = M B ( H , E ) − M D ( H , E ) CF(H,E)= MB(H,E)-MD(H,E) CF(H,E)=MB(H,E)−MD(H,E)
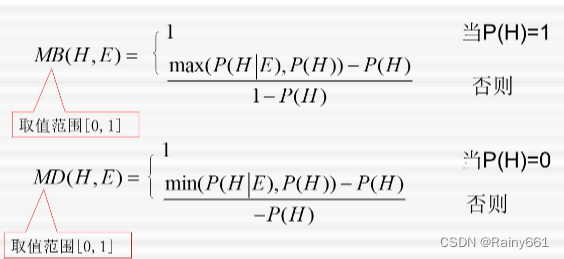
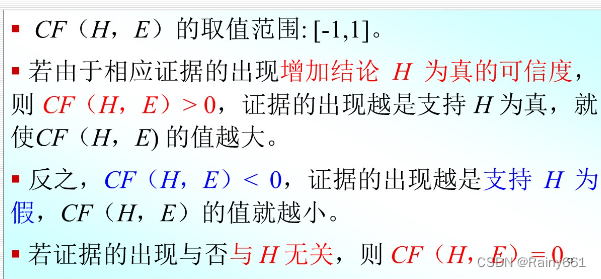
当MB(H,E)>0表示由于证据E的出现增加了对H的信任程度。
当MD(HE)>0表示由于证据E的出现增加了对H的不信任程度。
由于对同一个证据E,它不可能既增加对H的信任程度又增加对H的不信任程度,因此,MB(HE)与MD(HE)是工斥的
当MB(HE)>0时,MD(HE)=0
当MD(HE)>0时,MB(HE)=0
-
知识不确定性的表示
-
证据不确定性的表示
静态强度CF (H,E): 知识的强度,即当E所对应的证据为真时对H的影响程度
动态强度CF(E):证据 E当前的不确定性程度
-
组合证据不确定性。
- 不确定性的传递算法
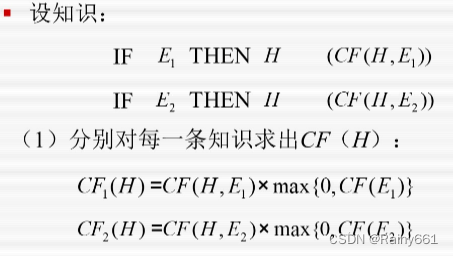
C一F模型中的不确定性推理:从不确定的初始证据出发通过运用相关的不确定性知识,最终推出结论并求出结论的可信度值。结论 H的可信度由下式计算:
CF(H) = CF(H,E) × max{0,CF(E)}
当CF(E)<0时,则CF(H)=0
当CF(E)=1时,则CF(H)= CF(H,E)
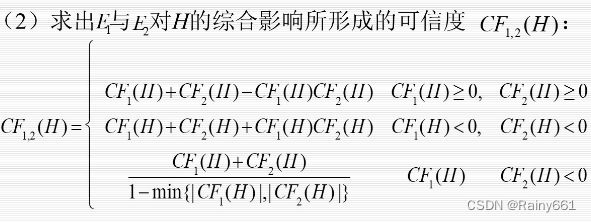
5. 结论不确定性的合成算法