一、Altitude 和 Position 模式
PX4 通过视觉进入 Altitude 和 Position 模式的核心就是向 /mavros/vision_posion/pose 话题发送里程计信息,本节通过 VINS-Fusion 的里程计信息为 PX4 提供视觉信息,从而达到无人机 视觉定高和定点 的目的,主要工作为创建一个将 vins 里程计信息发布给 /mavros/vision_pose/pose 话题的功能包。
1.1 创建 vins_to_mavros 功能包
首先创建一个工作空间
mkdir -p ~/catkin_ws/src/px4ctrl/src/
cd ~/catkin_ws/src/px4ctrl/src/然后创建一个名为 vision_to_mavros 的功能包
catkin_create_pkg vision_to_mavros roscpp std_msgs geometry_msgs mavros_msgs nav_msgs tf2_eigen tf在 ~/catkin_ws/src/px4ctrl/src/vision_to_mavros/src/ 目录下创建一个 vision_to_mavros 节点,其主要功能是将 VINS-Fusion 的 body 坐标系在 world 坐标系下为位姿转化为 base_link 在 map 坐标系中的位姿,并将转化后的位姿信息发布给 /mavros/vision_pose/pose 话题,详情参考
https://blog.csdn.net/qq_44998513/article/details/133877790
如果你使用的是 Realsense D435i 相机,并且使用 Realsense D435i 相机的 IMU 数据作为 VINS-Fuison 的 IMU 数据,则可以使用如下代码进行坐标变换。如果不是 Realsense D435i,也可以发布这个数据,从而切入定高和定点(因为切入定高和定点的条件是向 mavros 发布定位数据),但是在实际飞行中会由于坐标不对应而出现很多问题。
#include <ros/ros.h>
#include <geometry_msgs/PoseStamped.h>
#include <nav_msgs/Odometry.h>
#include <Eigen/Eigen>
Eigen::Vector3d p_mav;
Eigen::Quaterniond q_mav;
void vins_callback(const nav_msgs::Odometry::ConstPtr &msg)
{
if(msg->header.frame_id == "world")
{
p_mav = Eigen::Vector3d(msg->pose.pose.position.y, -msg->pose.pose.position.x, msg->pose.pose.position.z);
q_mav = Eigen::Quaterniond(msg->pose.pose.orientation.w, msg->pose.pose.orientation.x, msg->pose.pose.orientation.y, msg->pose.pose.orientation.z);
Eigen::AngleAxisd roll(M_PI/2,Eigen::Vector3d::UnitX()); // 绕 x 轴旋转 pi / 2
Eigen::AngleAxisd pitch(0,Eigen::Vector3d::UnitY());
Eigen::AngleAxisd yaw(0,Eigen::Vector3d::UnitZ());
Eigen::Quaterniond _q_mav = roll * pitch * yaw;
q_mav = q_mav * _q_mav;
}
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "vins_to_mavros");
ros::NodeHandle nh("~");
ros::Subscriber slam_sub = nh.subscribe<nav_msgs::Odometry>("odom", 100, vins_callback);
ros::Publisher vision_pub = nh.advertise<geometry_msgs::PoseStamped>("vision_pose", 10);
// the setpoint publishing rate MUST be faster than 2Hz
ros::Rate rate(20.0);
ros::Time last_request = ros::Time::now();
while(ros::ok()){
geometry_msgs::PoseStamped vision;
vision.pose.position.x = p_mav[0];
vision.pose.position.y = p_mav[1];
vision.pose.position.z = p_mav[2];
vision.pose.orientation.x = q_mav.x();
vision.pose.orientation.y = q_mav.y();
vision.pose.orientation.z = q_mav.z();
vision.pose.orientation.w = q_mav.w();
vision.header.stamp = ros::Time::now();
vision_pub.publish(vision);
ROS_INFO("\nposition:\n x: %.18f\n y: %.18f\n z: %.18f\norientation:\n x: %.18f\n y: %.18f\n z: %.18f\n w: %.18f", \
p_mav[0],p_mav[1],p_mav[2],q_mav.x(),q_mav.y(),q_mav.z(),q_mav.w());
ros::spinOnce();
rate.sleep();
}
return 0;
}
配置 CMakeList.txt 文件,在相应位置添加两行
add_executable(vins_to_mavros_node src/vins_to_mavros.cpp)
target_link_libraries(vins_to_mavros_node
${catkin_LIBRARIES}
)然后在 ~/catkin_ws/src/px4ctrl/src/vision_to_mavros/launch/ 下创建一个 launch 文件用于启动该节点,其内容如下
<launch>
<node pkg="vision_to_mavros" type="vins_to_mavros_node" name="vins_to_mavros" output="screen">
<remap from="~vision_pose" to="/mavros/vision_pose/pose" />
<remap from="~odom" to="/vins_estimator/odometry" />
</node>
</launch>完成后编译该功能包
cd ~/catkin_ws/src/px4ctrl/
catkin_make1.2. 启动 VINS-Fusion 提供里程计信息
接下来需要启动 d435i 相机和 vins 节点,参考
Ubuntu 20.04 配置 realsense-CSDN博客
Ubuntu 20.04 配置 VINS-Fusion-gpu + OpenCV 4.6.0-CSDN博客
以及刚刚编译好的 vision_to_mavros 功能包
source ~/catkin_ws/src/px4ctrl/devel/setup.bash
roslaunch vins_to_mavros vins_to_mavros.launch以下是输出结果
注意到 vision_to_mavros 节点已经开始打印位置信息了,说明 mavros 已经能够收到视觉里程计信息了,输入 rostopic list 打印当前话题
lilabws001@lilabws001:~$ rostopic list
/camera/accel/imu_info
/camera/gyro/imu_info
/camera/imu
/camera/infra1/camera_info
/camera/infra1/image_rect_raw
/camera/infra1/image_rect_raw/compressed
/camera/infra1/image_rect_raw/compressed/parameter_descriptions
/camera/infra1/image_rect_raw/compressed/parameter_updates
/camera/infra1/image_rect_raw/compressedDepth
/camera/infra1/image_rect_raw/compressedDepth/parameter_descriptions
/camera/infra1/image_rect_raw/compressedDepth/parameter_updates
/camera/infra1/image_rect_raw/theora
/camera/infra1/image_rect_raw/theora/parameter_descriptions
/camera/infra1/image_rect_raw/theora/parameter_updates
/camera/infra1/metadata
/camera/infra2/camera_info
/camera/infra2/image_rect_raw
/camera/infra2/image_rect_raw/compressed
/camera/infra2/image_rect_raw/compressed/parameter_descriptions
/camera/infra2/image_rect_raw/compressed/parameter_updates
/camera/infra2/image_rect_raw/compressedDepth
/camera/infra2/image_rect_raw/compressedDepth/parameter_descriptions
/camera/infra2/image_rect_raw/compressedDepth/parameter_updates
/camera/infra2/image_rect_raw/theora
/camera/infra2/image_rect_raw/theora/parameter_descriptions
/camera/infra2/image_rect_raw/theora/parameter_updates
/camera/infra2/metadata
/camera/motion_module/parameter_descriptions
/camera/motion_module/parameter_updates
/camera/realsense2_camera_manager/bond
/camera/rgb_camera/parameter_descriptions
/camera/rgb_camera/parameter_updates
/camera/stereo_module/auto_exposure_roi/parameter_descriptions
/camera/stereo_module/auto_exposure_roi/parameter_updates
/camera/stereo_module/parameter_descriptions
/camera/stereo_module/parameter_updates
/diagnostics
/feature_tracker/feature
/mavros/vision_pose/pose
/rosout
/rosout_agg
/tf
/tf_static
/vins_estimator/camera_pose
/vins_estimator/camera_pose_right
/vins_estimator/camera_pose_visual
/vins_estimator/extrinsic
/vins_estimator/image_track
/vins_estimator/imu_propagate
/vins_estimator/key_poses
/vins_estimator/keyframe_point
/vins_estimator/keyframe_pose
/vins_estimator/margin_cloud
/vins_estimator/odometry
/vins_estimator/path
/vins_estimator/point_cloud
/vins_estimator/rectify_pose_left
/vins_estimator/rectify_pose_right我们发现已经有 /mavros/vision_pose/pose 这个话题了,
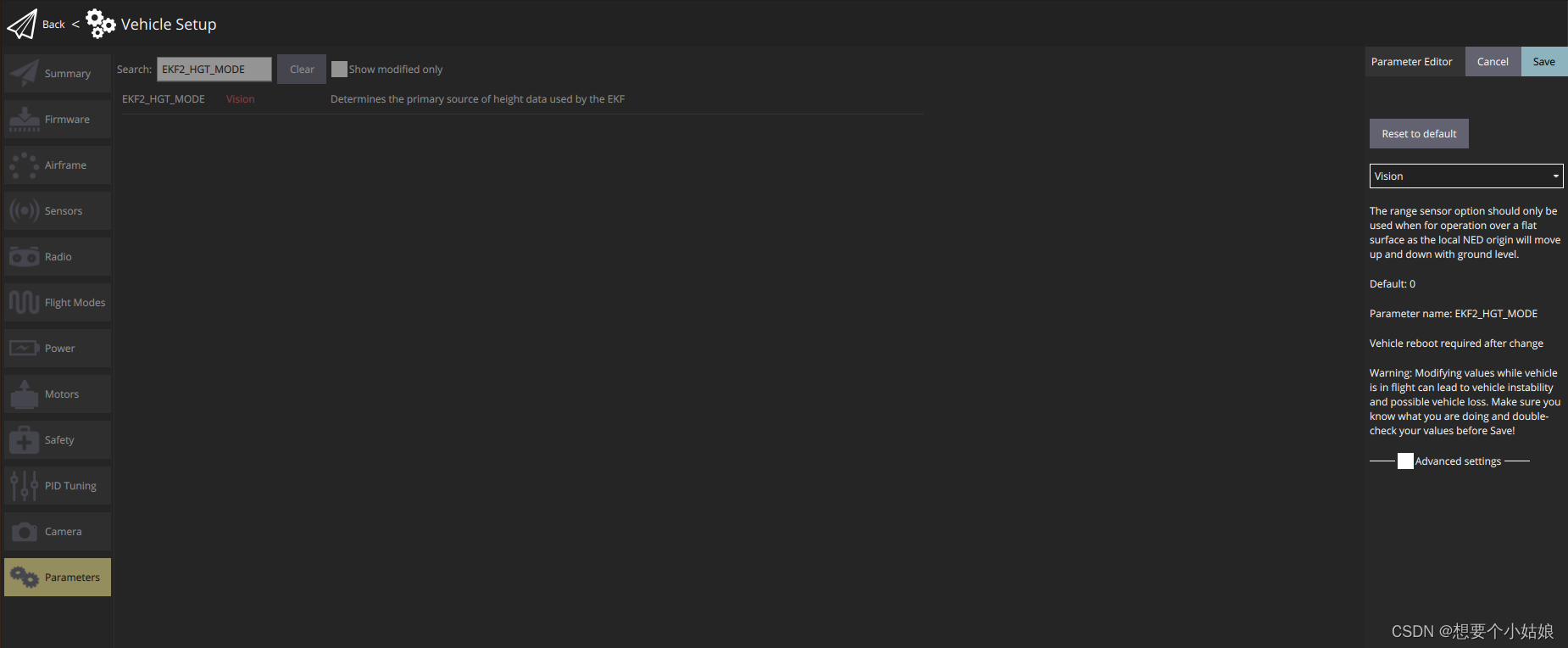
1.3 设置 PX4 通过 Vision 定位
然后我们打开 QGroundControl,打开参数设置,搜索 EKF2_HGT_MODE,将其对应的值修改为 Vision
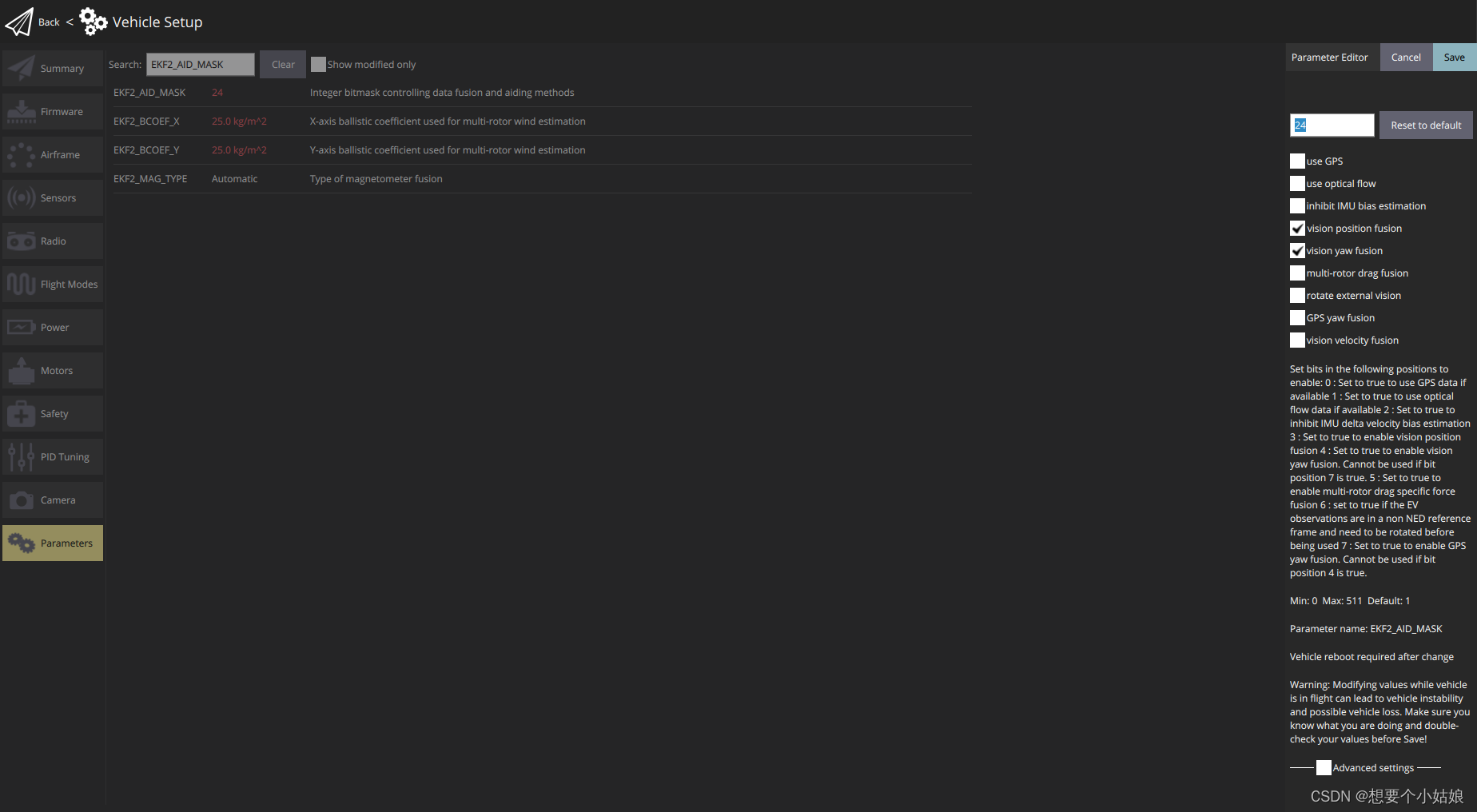
然后搜索 EKF2_AID_MASK,将其值修改为 24
1.4 切换 Altitude 和 Position 模式
接下来,只需要将飞控与机载电脑连接,然后启动 mavros 节点
roslaunch mavros px4.launch具体的配置可以参考
Ubuntu 安装并配置 mavros (USB 连接)_ubuntu安装mavros_想要个小姑娘的博客-CSDN博客
接下来订阅 /mavros/state 话题,
rostopic echo /mavros/state并查看节点状态,终端输入 rqt_graph

并且 /mavros/state 话题打印结果为
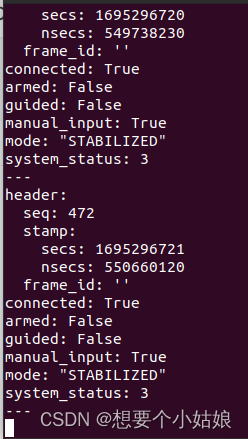
然后将遥控器连接上飞控,在 QGroundControl 中设置遥控器通道
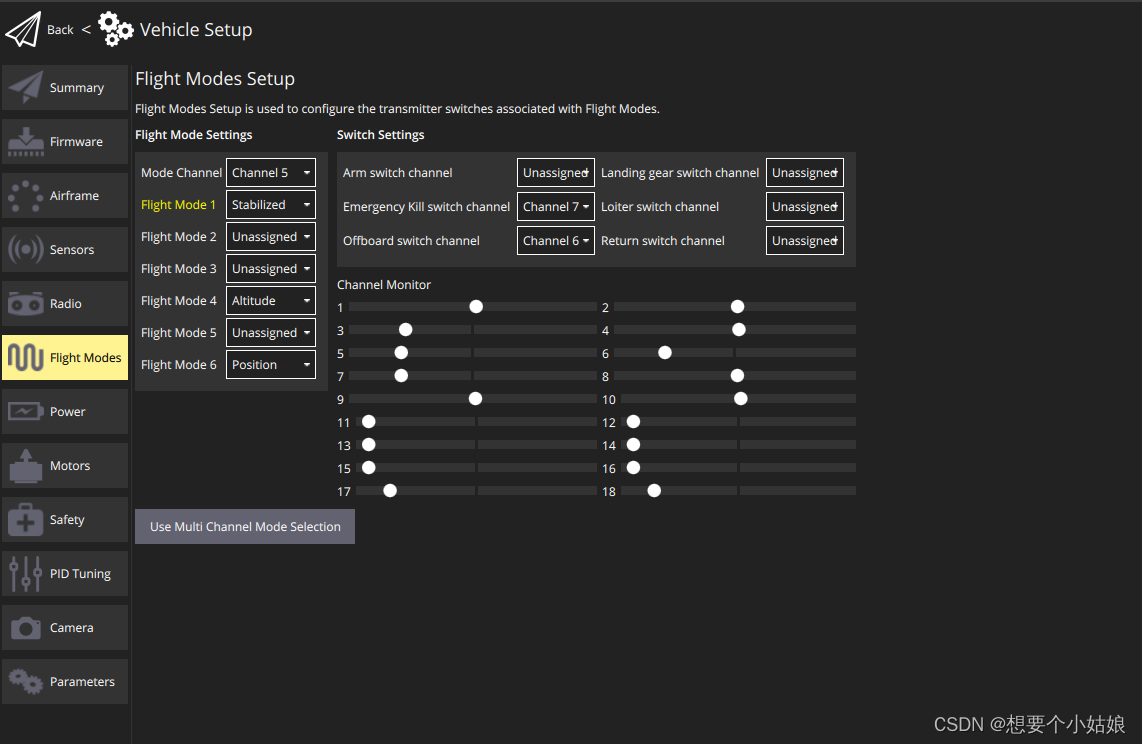
将通道五设置为 模式切换通道,并且设置飞行模式 1 为 自稳模式,飞行模式 4 为高度模式,飞行模式 6 设置为位置模式,设置完成后退出 QGroundControl(启动QGroundControl 会中断 mavros 节点的运行),然后重新启用 mavros 节点
roslaunch mavros px4.launch并打印输出 /mavros/state 话题信息
rostopic echo /mavros/state此时将 通道五 拨动到中位,我们发现 模式切换为了 ALTCTL,也就是 Altitude 模式(注意此时 VINS-Fusion 已经启动)

继续将 通道五 波动到上位,我们发现模式切换为了 POSCTL,也就是 Position 模式

至此就通过 VINS-Fusion 的里程计数据实现了 PX4 的视觉定点和定高功能。
二、Offboard 模式
PX4 通过进入 offboard 模式的核心就是向 /mavros/setpoint_position/local 话题发送位置信息,本节主要工作为创建一个向 /mavros/setpoint_position/local 话题发布消息的功能包。
2.1 创建 offboard 功能包
在当前工作空间下创建一个名为 offboard 的功能包
cd ~/catkin_ws/src/px4ctrl/src/
catkin_create_pkg offboard roscpp std_msgs geometry_msgs mavros_msgs然后在 ~/catkin_ws/src/px4ctrl/src/offboard/src 下创建一个 offboard 节点,其内容如下
/**
* @file offb_node.cpp
* @brief Offboard control example node, written with MAVROS version 0.19.x, PX4 Pro Flight
* Stack and tested in Gazebo SITL
*/
#include <ros/ros.h>
#include <geometry_msgs/PoseStamped.h>
#include <mavros_msgs/CommandBool.h>
#include <mavros_msgs/SetMode.h>
#include <mavros_msgs/State.h>
mavros_msgs::State current_state;
void state_callback(const mavros_msgs::State::ConstPtr& msg){
current_state = *msg;
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "offb_node");
ros::NodeHandle nh;
ros::Subscriber state_sub = nh.subscribe<mavros_msgs::State>
("mavros/state", 10, state_callback);
ros::Publisher local_pos_pub = nh.advertise<geometry_msgs::PoseStamped>
("mavros/setpoint_position/local", 10);
ros::ServiceClient arming_client = nh.serviceClient<mavros_msgs::CommandBool>
("mavros/cmd/arming");
ros::ServiceClient set_mode_client = nh.serviceClient<mavros_msgs::SetMode>
("mavros/set_mode");
//the setpoint publishing rate MUST be faster than 2Hz
ros::Rate rate(20.0);
// wait for FCU connection
while(ros::ok() && !current_state.connected){
ros::spinOnce();
rate.sleep();
}
geometry_msgs::PoseStamped pose;
pose.pose.position.x = 0;
pose.pose.position.y = 0;
pose.pose.position.z = 2;
//send a few setpoints before starting
for(int i = 100; ros::ok() && i > 0; --i){
local_pos_pub.publish(pose);
ros::spinOnce();
rate.sleep();
}
// mavros_msgs::SetMode offb_set_mode;
// offb_set_mode.request.custom_mode = "OFFBOARD";
// mavros_msgs::CommandBool arm_cmd;
// arm_cmd.request.value = true;
// ros::Time last_request = ros::Time::now();
while(ros::ok()){
// if( current_state.mode != "OFFBOARD" &&
// (ros::Time::now() - last_request > ros::Duration(5.0))){
// if( set_mode_client.call(offb_set_mode) &&
// offb_set_mode.response.mode_sent){
// ROS_INFO("Offboard enabled");
// }
// last_request = ros::Time::now();
// } else {
// if( !current_state.armed &&
// (ros::Time::now() - last_request > ros::Duration(5.0))){
// if( arming_client.call(arm_cmd) &&
// arm_cmd.response.success){
// ROS_INFO("Vehicle armed");
// }
// last_request = ros::Time::now();
// }
// }
local_pos_pub.publish(pose);
ros::spinOnce();
rate.sleep();
}
return 0;
}
配置 CMakeList.txt 文件,在相应位置添加两行
add_executable(offboard_node src/offboard.cpp)
target_link_libraries(offboard_node
${catkin_LIBRARIES}
)然后在 ~/catkin_ws/src/px4ctrl/src/offboard/launch/ 下创建一个 launch 文件用于启动该节点,其内容如下
<launch>
<node pkg="offboard" type="offboard_node" name="offboard" output="screen">
<remap from="~vision_pose" to="/mavros/vision_pose/pose" />
<remap from="~odom" to="/vins_estimator/odometry" />
</node>
</launch>最后编译该功能包
cd ~/catkin_ws/src/px4ctrl/
catkin_make2.2 切换 Offboard 模式
接下来,将飞控与机载电脑连接,然后启动 mavros 节点
roslaunch mavros px4.launch具体的配置可以参考
Ubuntu 安装并配置 mavros (USB 连接)_ubuntu安装mavros_想要个小姑娘的博客-CSDN博客
启动 offboard 节点
roslaunch offboard offboard.launch接下来订阅 /mavros/state 话题,
rostopic echo /mavros/state并查看节点状态,终端输入 rqt_graph

并且 /mavros/state 话题打印结果为

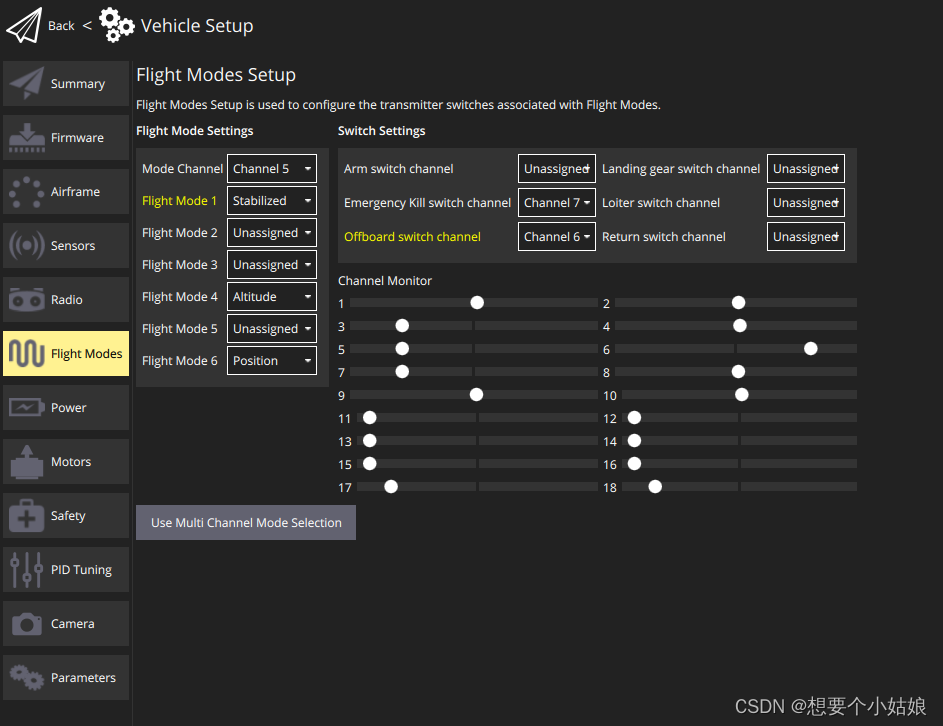
然后将遥控器连接上飞控,在 QGroundControl 中设置遥控器通道
将 Offboard switch channel 设置为通道六,设置完成后退出 QGroundControl(启动QGroundControl 会中断 mavros 节点的运行),然后重新启用 mavros 节点
此时将 通道六 拨动到上位,我们发现 模式切换为了 OFFBOARD,也就是 Offboard 模式,

需要注意的是,如果无法切入 OFFBARD 模式,需要设置 ROS_MASTER_URI 和 ROS_IP,然后再运行 offboard 节点,终端输入
export ROS_MASTER_URI=http://$home_ip:11311
export ROS_IP=$home_ip
source ~/catkin_ws/src/px4ctrl/devel/setup.bash
roslaunch offboard offboard.launch至此就进入了 PX4 的 Offboard 模式,通过机载计算机编程向飞控发送指令,从而实现机载计算机对无人机的控制。