前言
我用最新版PX4固件,offboard模式飞机无法起飞,网上有一种说法是固件版本的问题,让用旧一点的版本
添加链接描述
这个链接描述的情况和我的一模一样,所以我肯定是按这个方法尝试的
安装旧版本卡住了,打算从源头解决,继续查找offboard模式无人机无法起飞的原因,看到下面这篇文章。
解决offboard模式无人机无法起飞
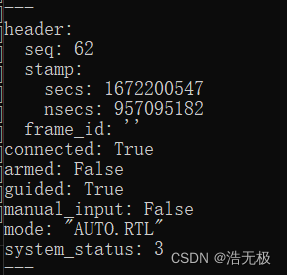
使用rostopic echo /mavros/state命令,查询结果如下。可以看到,mavros是连接上的,就是无法解锁。
两个方法解决:
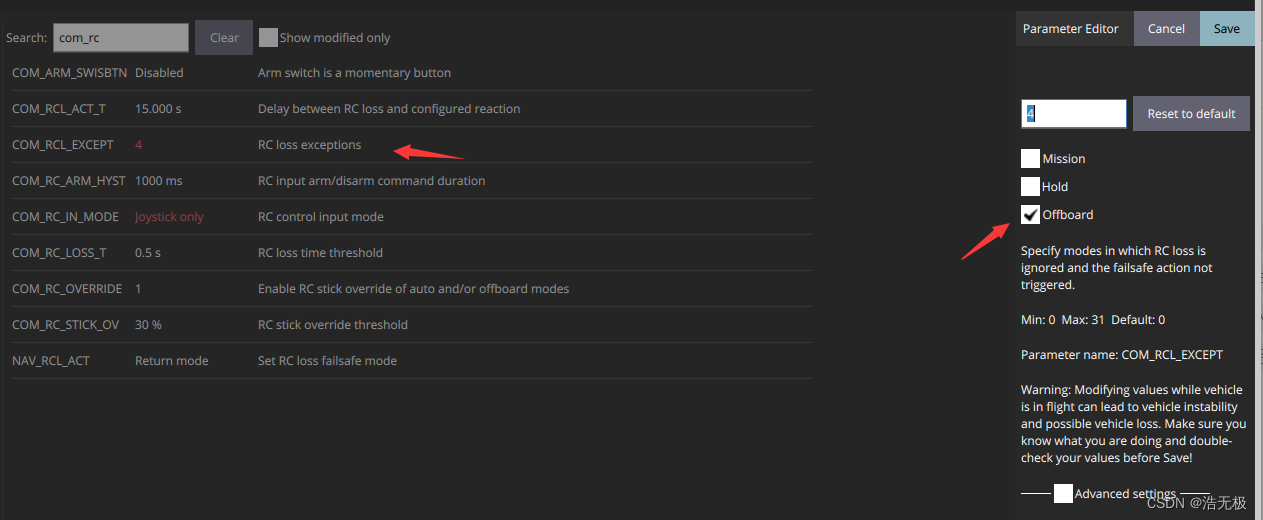
1、在仿真同时开启QGC,设置COM_RCL_EXCEPT=4
2、下载一个管用的旧版本,我之前尝试该方法失败了。但我觉得这个办法是可行的,我可能是网络不好,下载出错了,安装PX4环境经常会因为网络问题出现各种奇怪问题。
我使用方法一,最后起飞咯,镇楼。
第三个解决方法(2023.5.19更新)
启动好前面的文件之后。
使用命令:rosrun mavros mavparam set COM_RCL_EXCEPT 4
这个方法最简单,我几乎找了全网,没有提到这个方法的。要是有用还不点个赞!
参考链接:
http://wiki.ros.org/mavros
https://masoudir.github.io/mavros_tutorial/Chapter1_ArduRover_with_CLI/Step4_How_to_set_and_get_parameters/