mqtt_client包提供了 ROS Nodelet 或 ROS 2组件节点,使连接的基于 ROS 的设备或机器人能够使用MQTT协议通过
MQTT 代理交换 ROS 消息。这通常适用于任意 ROS 消息类型。mqtt_client还可以与在不基于 ROS 的设备上运行的
MQTT 客户端交换原始消息。
源码地址:
https://github.com/ika-rwth-aachen/mqtt_client
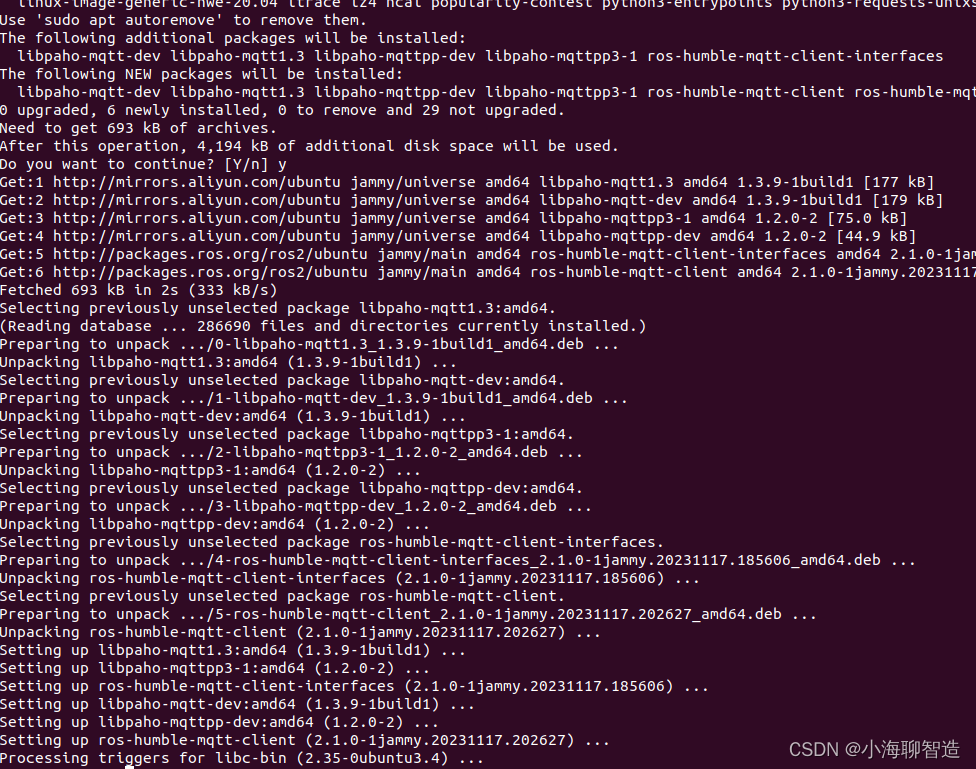
安装
sudo apt update
安装mqtt-client 语句
sudo apt install ros-$ROS_DISTRO-mqtt-client
$ROS_DISTRO这个是你的ros 版本号
sudo apt install ros-humble-mqtt-client
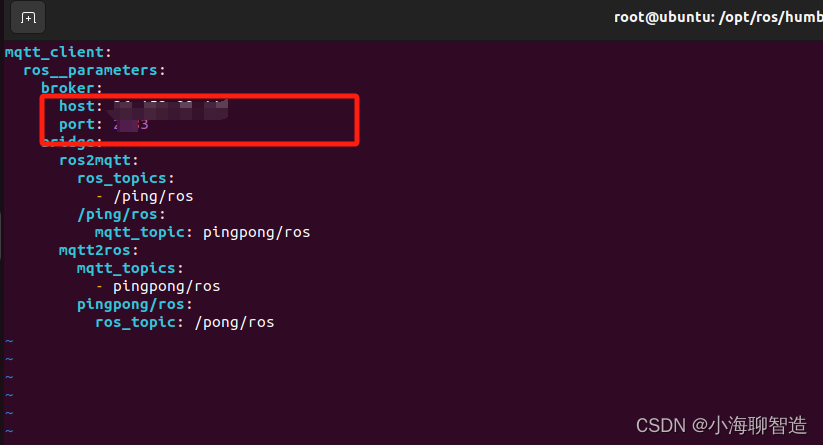
修改配置文件
cd /opt/ros/humble/share/mqtt_client/config

vim params.ros2.yaml
改成你自己的地址
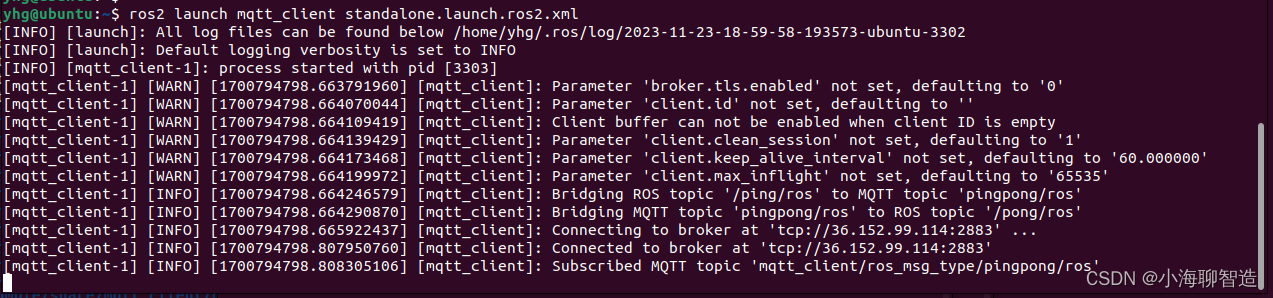
启动
扫描二维码关注公众号,回复:
17132985 查看本文章

ros2 launch mqtt_client standalone.launch.ros2.xml
启动成功
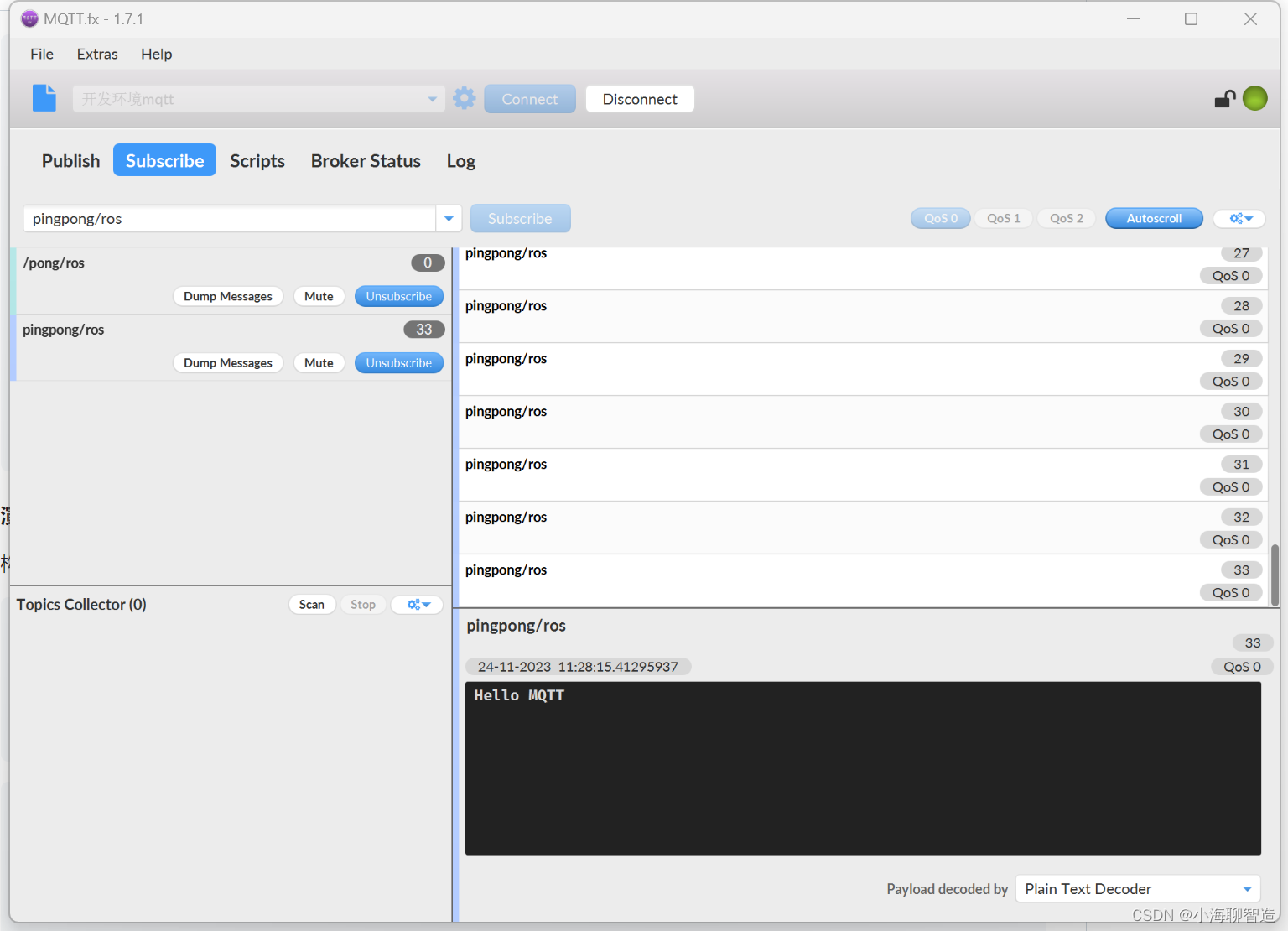
测试:
ros 端发布消息
ros2 topic pub /ping/ros std_msgs/msg/String "{data: \"Hello MQTT\"}"
本地计算机客户端监听