推导
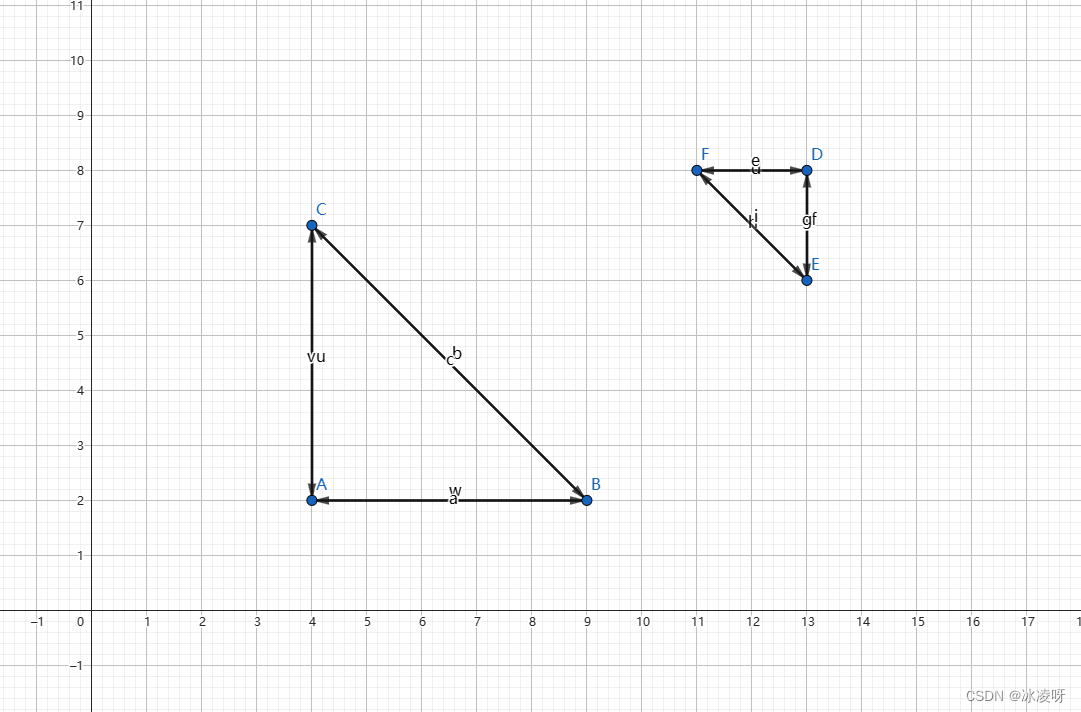
三角形ABC仿射成为三角形DEF的变换矩阵M
猜测矩阵M=
[
[a1,b1,c1],
[a2,b2,c2]
]
仿射变换的数学联系
对于A点和D点
AX*a1+AY*b1+c1=DX
AX*a2+AY*b2+c1=DY
对于B点和E点
BX*a1+BY*b1+c1=EX
BX*a2+BY*b2+c2=EY
对于C点和F点
CX*a1+CY*b1+c1=FX
CX*a2+CY*b2+c2=FY
求解
对以上数学联系式均取第一条
AX*a1+AY*b1+c1=DX
BX*a1+BY*b1+c1=EX
CX*a1+CY*b1+c1=FX
可以看出这是一个三元一次方程组,我们可以借助scipy库linalg模块的solve函数进行求解,它的用法大家可以参考一下其他资料,这里不多赘述
对数学联系式均取第二条
AX*a2+AY*b2+c1=DY
BX*a2+BY*b2+c2=EY
CX*a2+CY*b2+c2=FY
也是一个三元一次方程组,同样可以借助scipy库linalg模块的solve函数进行求解
验证
根据以上各个点的坐标,分别用opencv的函数,和我们猜想的计算过程,观测对比两个结果是否一致
import numpy as np
import cv2 as cv
import math
AX = 4
AY = 2
BX = 9
BY = 2
CX = 4
CY = 7
DX = 13
DY = 8
EX = 13
EY = 6
FX = 11
FY = 8
ps1 = np.float32([
[AX, AY],
[BX, BY],
[CX, CY]
])
ps2 = np.float32([
[DX, DY],
[EX, EY],
[FX, FY]
])
M = cv.getAffineTransform(ps1, ps2)
print(f"opencv_M=\n{M}")
print()
A = np.array([
[AX, AY, 1],
[BX, BY, 1],
[CX, CY, 1]
])
b1 = np.array([
[DX],
[EX],
[FX]
])
b2 = np.array([
[DY],
[EY],
[FY]
])
from scipy import linalg
r1 = linalg.solve(A, b1)
r2 = linalg.solve(A, b2)
r = np.array([
r1.T[0],
r2.T[0]
])
print(f"self_M=\n{r}")
运行结果

可以看出,结果是一致的,函数的底层实现原理就是如此