C++实现节点发布多边形,通过RVIZ查看
例子主要使用visualization_msgs::Marker 这个消息,通过节点发布这个消息,然后在rviz上订阅这个topic,即可以显示出画的多边形。
#include <ros/ros.h>
#include <iostream>
#include <visualization_msgs/Marker.h>
#include <string>
struct Point {
public:
float x;
float y;
Point()
{
x = 0.0;
y = 0.0;
};
Point(const float xx, const float yy):x(xx), y(yy)
{
};
};
int main (int argc, char** argv)
{
//初始化节点
ros::init(argc, argv, "serial_example_node");
//声明节点句柄
ros::NodeHandle nh;
ros::Publisher polygon_pub = nh.advertise<visualization_msgs::Marker>("polygon_marker", 1, true);
std::vector<Point> polygon;
polygon.push_back(Point(-1.8578, -4.1203));
polygon.push_back(Point(-3.453, -4.0748));
polygon.push_back(Point(-3.4025, -2.58));
polygon.push_back(Point(-1.8183, -2.5885));
visualization_msgs::Marker marker;
marker.header.frame_id = "map";
marker.header.stamp = ros::Time::now();
marker.ns = "polygon";
marker.id = 0;
marker.type = visualization_msgs::Marker::LINE_STRIP;
marker.action = visualization_msgs::Marker::ADD;
marker.pose.orientation.w = 1.0;
marker.scale.x = 0.1;
marker.color.r = 1.0;
marker.color.a = 1.0;
for(int i = 0; i < polygon.size(); i++)
{
geometry_msgs::Point p;
p.x = polygon[i].x;
p.y = polygon[i].y;
p.z = 0.0;
marker.points.push_back(p);
}
geometry_msgs::Point p;
p.x = polygon[0].x;
p.y = polygon[0].y;
p.z = 0.0;
marker.points.push_back(p);
//指定循环的频率
ros::Rate loop_rate(5);
while(ros::ok())
{
polygon_pub.publish(marker);
//处理ROS的信息,比如订阅消息,并调用回调函数
ros::spinOnce();
loop_rate.sleep();
}
}
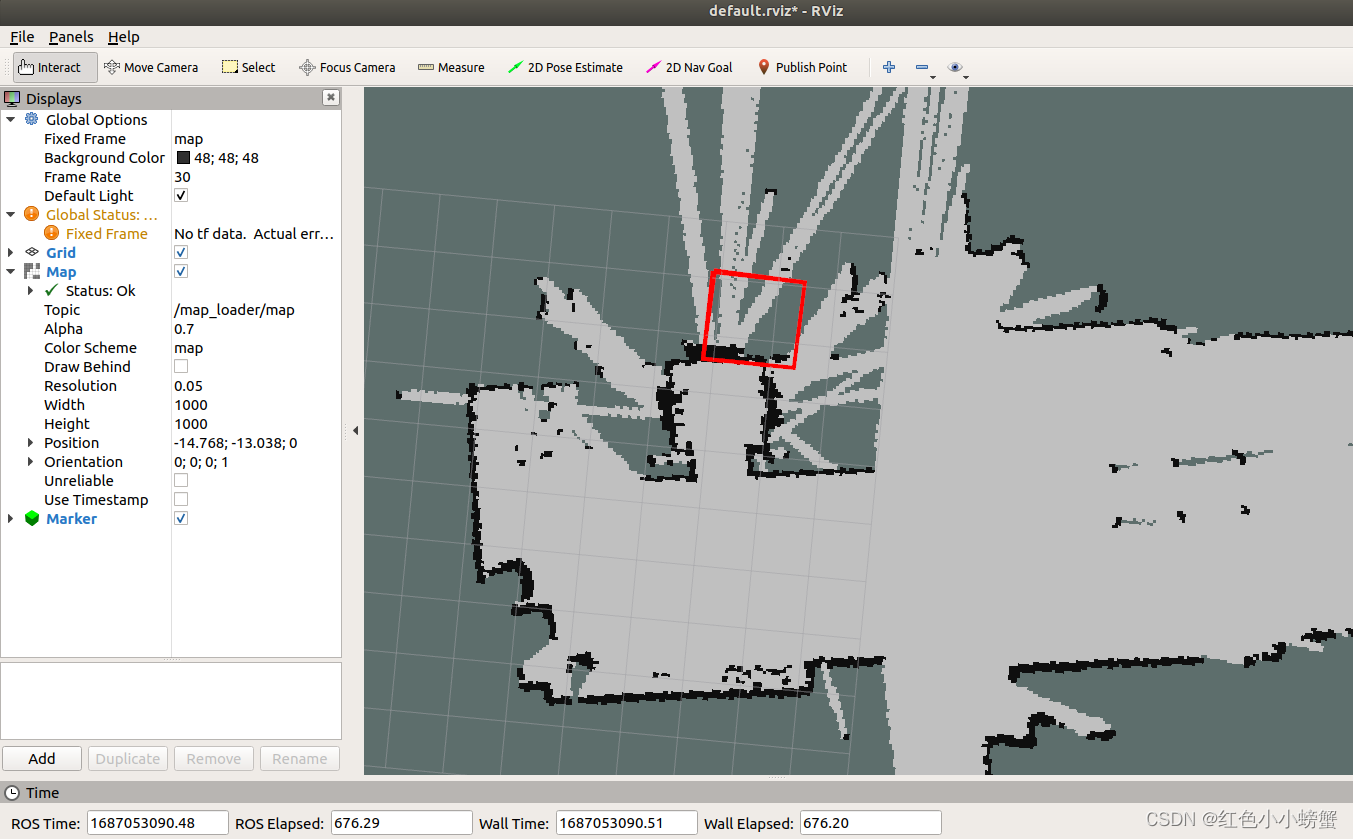
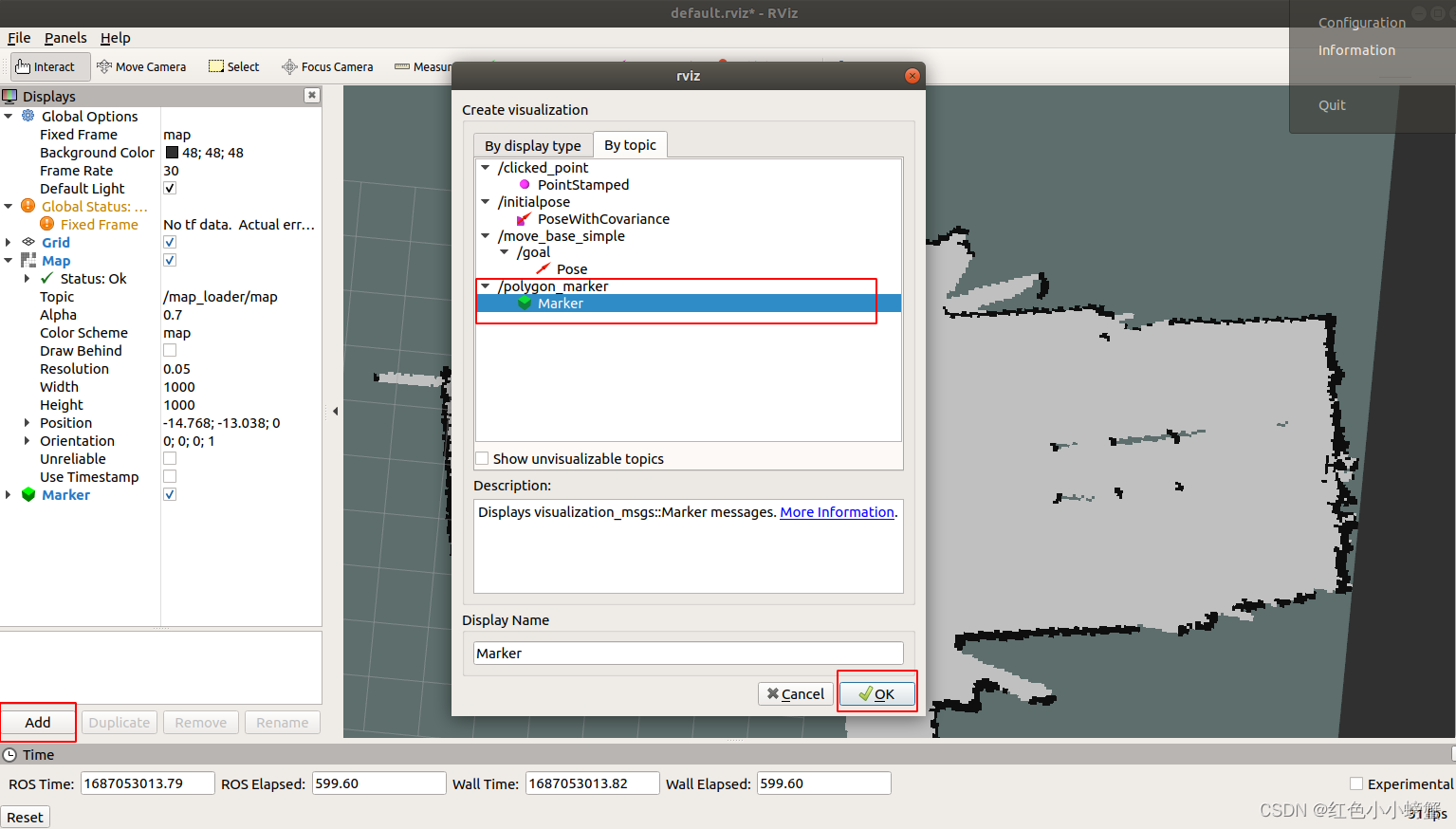
节点启动后,启动rviz订阅topic即可,如下图。
下图中红色矩形框即为显示的多边形。