CV - 计算机视觉 | ML - 机器学习 | RL - 强化学习 | NLP 自然语言处理
Subjects: cs.CV
1.Tracking through Containers and Occluders in the Wild(CVPR 2023)

标题:在野外通过容器和遮挡物进行追踪
作者:Basile Van Hoorick, Pavel Tokmakov, Simon Stent, Jie Li, Carl Vondrick
文章链接:https://arxiv.org/abs/2305.03052v1
项目代码:https://tcow.cs.columbia.edu/


摘要:
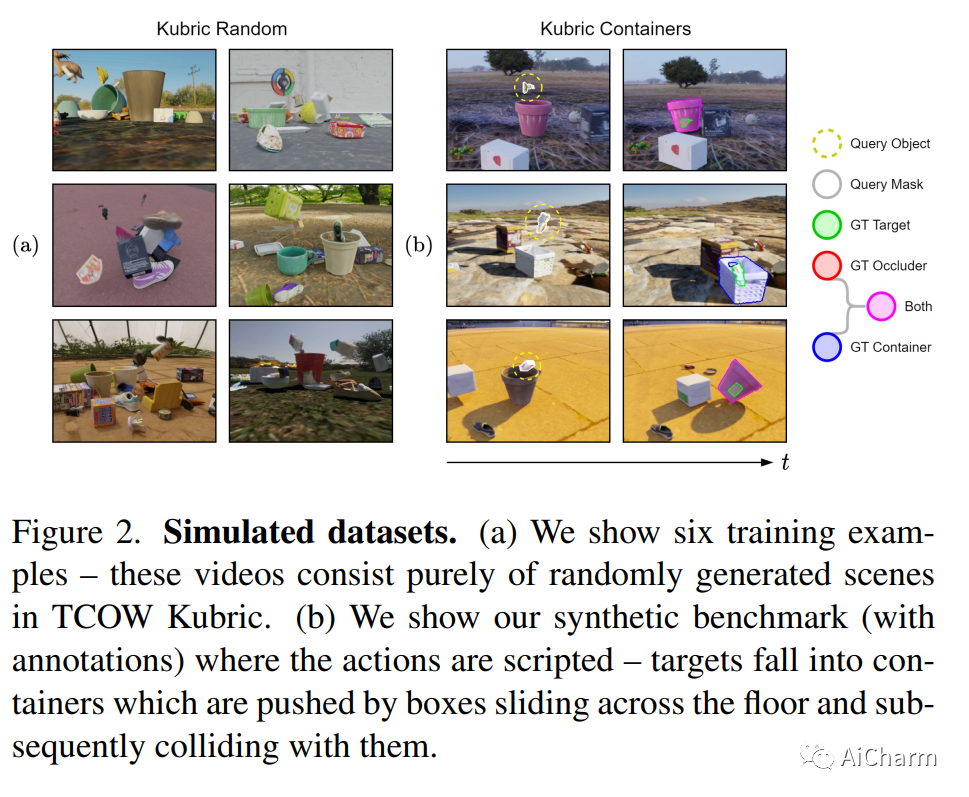
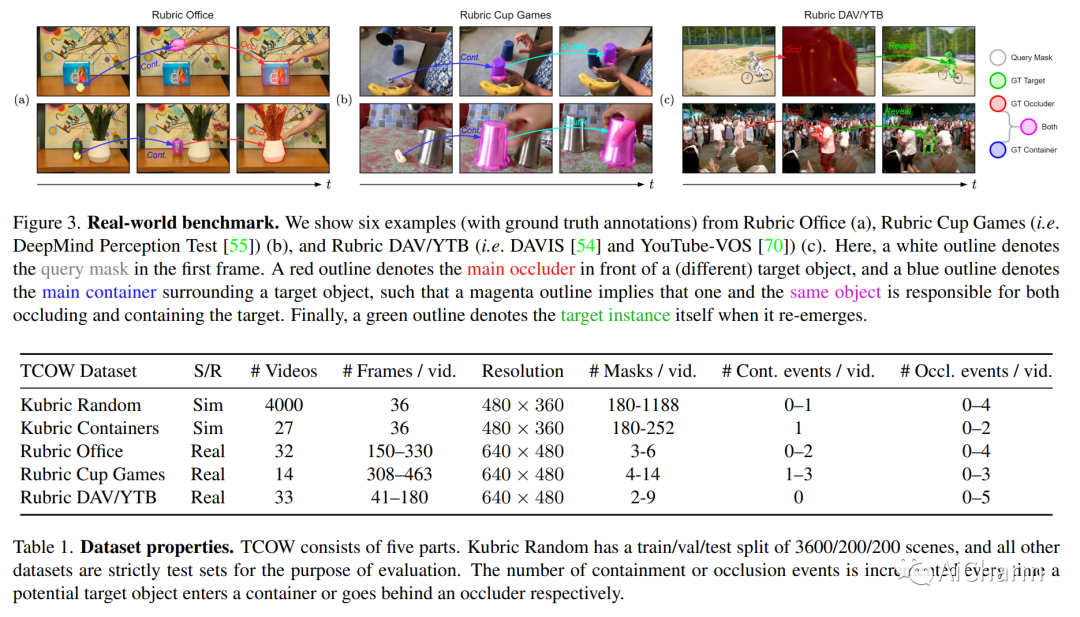
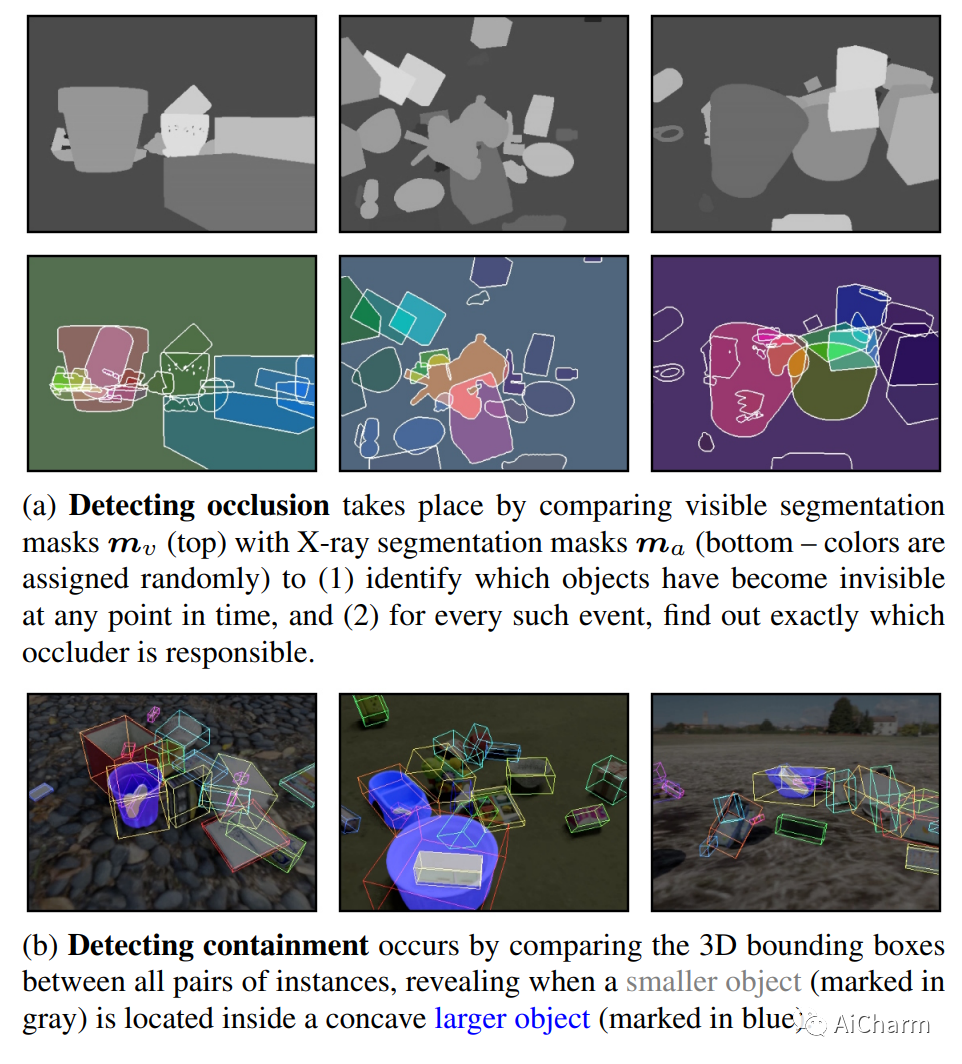
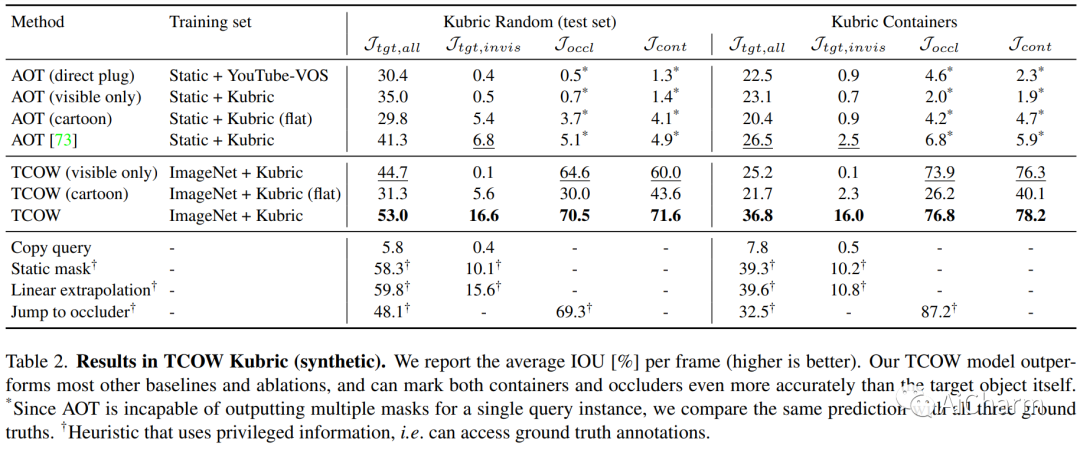
在杂乱和动态的环境中持续跟踪对象仍然是计算机视觉系统的一项艰巨挑战。在本文中,我们介绍了 TCOW ,这是一种通过严重遮挡和遏制进行视觉跟踪的新基准和模型。我们设置了一个任务,目标是在给定视频序列的情况下,分割目标对象的投影范围以及周围存在的容器或遮挡物。为了研究这项任务,我们创建了合成和带注释的真实数据集的混合物,以支持在各种形式的任务变化(例如移动或嵌套包含)下对模型性能进行监督学习和结构化评估。我们评估了两个最近的基于 transformer 的视频模型,发现虽然它们在某些任务变化设置下能够令人惊讶地跟踪目标,但在我们可以声称跟踪模型已经获得了对象永久性的真实概念之前,仍然存在相当大的性能差距.
2.LIMOT: A Tightly-Coupled System for LiDAR-Inertial Odometry and Multi-Object Tracking

标题:LIMOT:用于 LiDAR 惯性里程计和多目标跟踪的紧耦合系统
作者:Chung-Ching Lin, Jiang Wang, Kun Luo, Kevin Lin, Linjie Li, Lijuan Wang, Zicheng Liu
文章链接:https://arxiv.org/abs/2305.00406v1
项目代码:https://github.com/microsoft/AdaM

摘要:
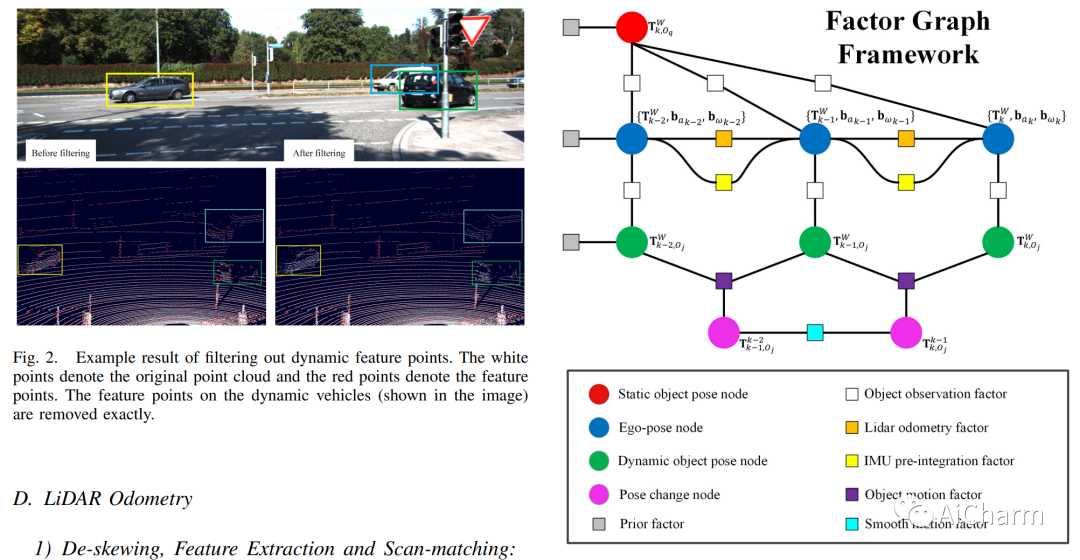
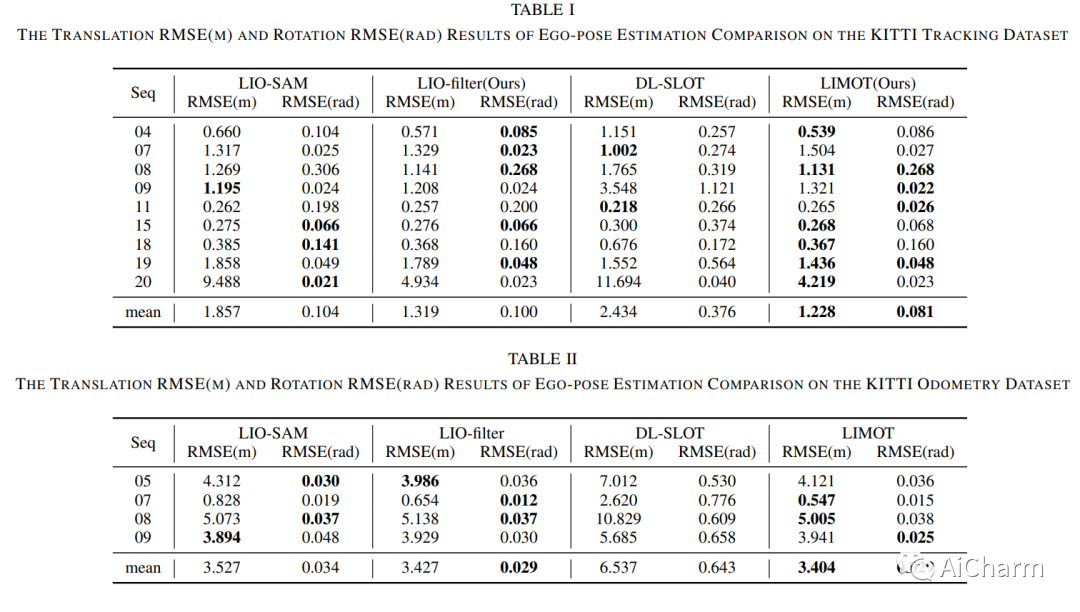
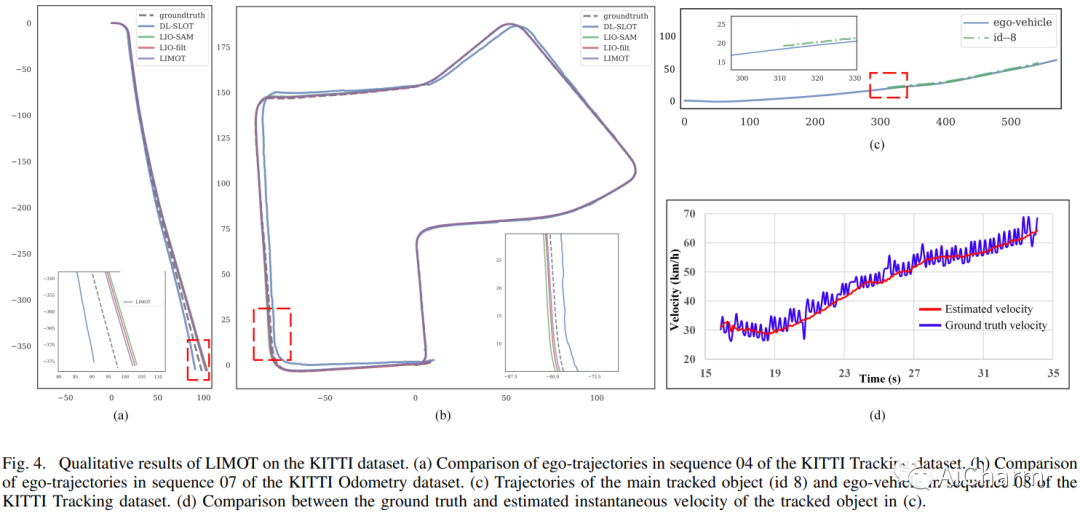
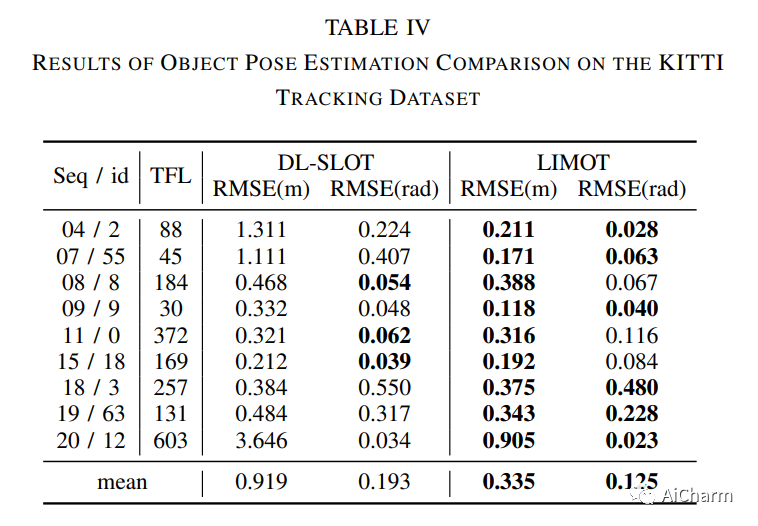
同步定位与地图构建 (SLAM) 对于自动驾驶的实施至关重要。大多数 LiDAR 惯性 SLAM 算法都假设静态环境,导致动态环境中的定位不可靠。此外,准确跟踪运动物体对于自主车辆运行的控制和规划具有重要意义。本研究提出了 LIMOT,这是一种紧密耦合的多目标跟踪和 LiDAR 惯性 SLAM 系统,能够准确估计自我车辆和物体的姿态。首先,我们使用物体检测器生成的 3D 边界框来表示所有可移动物体,并使用惯性测量单元 (IMU) 预积分结果执行 LiDAR 里程计。基于滑动窗口中跟踪对象的历史轨迹,我们执行稳健的对象关联。我们提出了一种基于轨迹的动态特征过滤方法,该方法利用跟踪结果过滤掉属于运动物体的特征。然后进行基于因子图的优化,以优化 IMU 的偏差以及滑动窗口中本车和周围物体的姿态。在 KITTI 数据集上进行的实验表明,我们的方法比我们之前的工作 DL-SLOT 和其他 SLAM 和多目标跟踪基线方法实现了更好的姿势和跟踪精度。
3.Tracker Meets Night: A Transformer Enhancer for UAV Tracking
标题:Tracker Meets Night:无人机跟踪的变形增强器
作者:Junjie Ye, Changhong Fu, Ziang Cao, Shan An, Guangze Zheng, Bowen Li
文章链接:https://arxiv.org/abs/2303.10951v1
项目代码:https://github.com/vision4robotics/SCT
摘要:
目标跟踪的大多数先前进展是在具有良好照明的白天场景中实现的。迄今为止,最先进的技术很难在夜间发挥其优势,从而大大阻碍了与视觉跟踪相关的无人机 (UAV) 应用的扩展。为了在夜间实现可靠的 UAV 跟踪,提出了一种基于空间通道 Transformer 的低光增强器(即 SCT),它以一种新颖的任务启发方式进行训练,并在跟踪方法之前插入。为了实现针对高级任务的语义级弱光增强,提出了一种新颖的空间通道注意模块,以在保留局部上下文的同时对全局信息进行建模。在增强过程中,SCT 通过稳健的非线性曲线投影同时对夜间图像进行去噪和照明。此外,为了提供全面的评估,我们构建了一个具有挑战性的夜间跟踪基准,即 DarkTrack2021,它包含 110 个具有挑战性的序列,总共超过 100 K 帧。对公共 UAVDark135 基准测试和新建的 DarkTrack2021 基准测试的评估表明,与其他排名靠前的低光增强器相比,受任务启发的设计使 SCT 在夜间无人机跟踪方面具有显着的性能提升。在典型无人机平台上的真实世界测试进一步验证了所提出方法的实用性。DarkTrack2021 基准测试和所提议方法的代码可在此 https URL 上公开获得。
更多Ai资讯:公主号AiCharm