文章目录
CSDN提示我字数太多,一篇发不下,只好拆分开x2。。。
关于
- 标准DH模型
- 改进DH模型
- 机器人正运动学
的相关内容详见第一篇文章:
关于
- 机器人逆运动学求解 θ 1 \theta_1 θ1、 θ 2 \theta_2 θ2、 θ 3 \theta_3 θ3
的内容详见第二篇文章
❤ 2023.6.27 ❤
机器人逆运动学
△ 代数解求 θ 4 \theta_4 θ4、 θ 5 \theta_5 θ5、 θ 6 \theta_6 θ6
○ 求解 θ 4 \theta_4 θ4
将式末端位姿描述矩阵两边同时左 3 2 T − 1 2 1 T − 1 1 0 T − 1 {
{_3^2}T}^{-1}\ {
{_2^1}T}^{-1}\ {
{_1^0}T}^{-1} 32T−1 21T−1 10T−1得:
3 2 T − 1 2 1 T − 1 1 0 T − 1 6 0 T = 4 3 T ( θ 4 ) 5 4 T ( θ 5 ) 6 5 T ( θ 6 ) \ {
{_3^2}T}^{-1}\ {
{_2^1}T}^{-1}\ {
{_1^0}T}^{-1}\ _6^0T=_4^3T\left(\theta_4\right)\ _5^4T\left(\theta_5\right)\ _6^5T\left(\theta_6\right) 32T−1 21T−1 10T−1 60T=43T(θ4) 54T(θ5) 65T(θ6)
其中:
3 2 T − 1 2 1 T − 1 1 0 T − 1 = [ c 1 c 23 s 1 c 23 s 23 − a 1 c 23 − d 1 s 23 − a 2 c 3 − c 1 s 23 − s 1 s 23 c 23 a 1 s 23 − d 1 c 23 + a 2 s 3 s 1 − c 1 0 0 0 0 0 1 ] \ {
{_3^2}T}^{-1}\ {
{_2^1}T}^{-1}\ {
{_1^0}T}^{-1}=\left[\begin{matrix}c_1c_{23}&s_1c_{23}&s_{23}&-a_1c_{23}-d_1s_{23}-a_2c_3\\-c_1s_{23}&-s_1s_{23}&c_{23}&a_1s_{23}-d_1c_{23}+a_2s_3\\s_1&-c_1&0&0\\0&0&0&1\\\end{matrix}\right] 32T−1 21T−1 10T−1=
c1c23−c1s23s10s1c23−s1s23−c10s23c2300−a1c23−d1s23−a2c3a1s23−d1c23+a2s301
4 3 T ( θ 4 ) 5 4 T ( θ 5 ) 6 5 T ( θ 6 ) = [ c 4 c 5 c 6 − s 4 s 6 − c 6 s 4 − c 4 c 5 s 6 c 4 s 5 a 3 c 6 s 5 − s 5 s 6 − c 5 − d 4 c 4 s 6 + c 5 c 6 s 4 c 4 c 6 − c 5 s 4 s 6 s 4 s 5 0 0 0 0 1 ] {_4^3}T\left(\theta_4\right)\ _5^4T\left(\theta_5\right)\ _6^5T\left(\theta_6\right)=\left[\begin{matrix}c_4c_5c_6-s_4s_6&-c_6s_4-c_4c_5s_6&c_4s_5&a_3\\c_6s_5&-s_5s_6&-c_5&-d_4\\c_4s_6+c_5c_6s_4&c_4c_6-c_5s_4s_6&s_4s_5&0\\0&0&0&1\\\end{matrix}\right] 43T(θ4) 54T(θ5) 65T(θ6)=
c4c5c6−s4s6c6s5c4s6+c5c6s40−c6s4−c4c5s6−s5s6c4c6−c5s4s60c4s5−c5s4s50a3−d401
- ※ 计算过程
syms Q1 Q2 Q3 Q4 Q5 Q6 d1 d4 dt a1 a2 a3 nx ny nz ox oy oz ax ay az px py pz
%ZK-500连杆间齐次变换矩阵
T_01 =[ cos(Q1), -sin(Q1), 0, 0
sin(Q1), cos(Q1), 0, 0
0, 0, 1, d1
0, 0, 0, 1];
T_12 =[ cos(Q2), -sin(Q2), 0, a1
0, 0, -1, 0
sin(Q2), cos(Q2), 0, 0
0, 0, 0, 1];
T_23 =[ cos(Q3), -sin(Q3), 0, a2
sin(Q3), cos(Q3), 0, 0
0, 0, 1, 0
0, 0, 0, 1];
T_34 =[ cos(Q4), -sin(Q4), 0, a3
0, 0, -1, -d4
sin(Q4), cos(Q4), 0, 0
0, 0, 0, 1];
T_45 =[ cos(Q5), -sin(Q5), 0, 0
0, 0, 1, 0
-sin(Q5), -cos(Q5), 0, 0
0, 0, 0, 1];
T_56 =[ cos(Q6), -sin(Q6), 0, 0
0, 0, -1, 0
sin(Q6), cos(Q6), 0, 0
0, 0, 0, 1];
T_6t=[ 1 0 0 0
0 1 0 0
0 0 1 dt
0 0 0 1];
% 计算T_06和T_16的逆矩阵
T_06=[nx ox ax px;ny oy ay py;nz oz az pz;0 0 0 1];
T_03=T_01*T_12*T_23;
T_36=T_34*T_45*T_56;
% 计算T_01的逆矩阵
T_03_inv = inv(T_03);
T_03_inv=simplify(T_03_inv)
T_36=simplify(T_36)
结果
T_03_inv =
[ cos(Q2 + Q3)*cos(Q1), cos(Q2 + Q3)*sin(Q1), sin(Q2 + Q3), - a1*cos(Q2 + Q3) - d1*sin(Q2 + Q3) - a2*cos(Q3)]
[-sin(Q2 + Q3)*cos(Q1), -sin(Q2 + Q3)*sin(Q1), cos(Q2 + Q3), a1*sin(Q2 + Q3) - d1*cos(Q2 + Q3) + a2*sin(Q3)]
[ sin(Q1), -cos(Q1), 0, 0]
[ 0, 0, 0, 1]
T_36 =
[cos(Q4)*cos(Q5)*cos(Q6) - sin(Q4)*sin(Q6), - cos(Q6)*sin(Q4) - cos(Q4)*cos(Q5)*sin(Q6), cos(Q4)*sin(Q5), a3]
[ cos(Q6)*sin(Q5), -sin(Q5)*sin(Q6), -cos(Q5), -d4]
[cos(Q4)*sin(Q6) + cos(Q5)*cos(Q6)*sin(Q4), cos(Q4)*cos(Q6) - cos(Q5)*sin(Q4)*sin(Q6), sin(Q4)*sin(Q5), 0]
[ 0, 0, 0, 1]
matlab真好用。。。。
令元素(1,3)和(3,3)等号左右相等得到:
a x c 1 c 23 + a y s 1 c 23 + a z s 23 = c 4 s 5 a x s 1 − a y c 1 = s 4 s 5 a_xc_1c_{23}+a_ys_1c_{23}+a_zs_{23}=c_4s_5\\ a_xs_1-a_yc_1=s_4s_5 axc1c23+ays1c23+azs23=c4s5axs1−ayc1=s4s5
计算过程见前面求 θ 2 \theta_2 θ2的内容
→→→跳转到 计算过程
化简是手动化简的。。。
记
h 1 = a x c 1 c 23 + a y s 1 c 23 + a z s 23 h 2 = a x s 1 − a y c 1 h_1=a_xc_1c_{23}+a_ys_1c_{23}+a_zs_{23}\\ h_2=a_xs_1-a_yc_1 h1=axc1c23+ays1c23+azs23h2=axs1−ayc1
将式()等号两边取平方和可得
s 5 2 = h 1 2 + h 2 2 s_5^2=h_1^2+h_2^2 s52=h12+h22
虽然这里通过
θ 5 = arcsin ( ± ( h 1 2 + h 2 2 ) ) \theta_5=\arcsin{\left(\pm\sqrt{\left(h_1^2+h_2^2\right)}\right)} θ5=arcsin(±(h12+h22))
就能求出 θ 5 \theta_5 θ5但是根据前面的说法,最好用atan2()函数来求解,所以这里的结果只用来判断 θ 5 \theta_5 θ5是不是趋向于0
根据程序验证,当 θ 5 \theta_5 θ5取值为0时,由于电脑的舍入误差的影响,经过计算的 θ 5 \theta_5 θ5的数值并不为0,而是一个极小的值。
如果直接判断 θ 5 \theta_5 θ5是否为零,则不但会使判断失效,还会影响 θ 4 \theta_4 θ4的取值,因此这里虽然写作判断 θ 5 \theta_5 θ5是否为0,但在程序中是判断 s 5 2 s_5^2 s52的是否小于某一特定值。
当 θ 5 ≠ 0 \theta_5\neq0 θ5=0时
θ 4 = A t a n 2 ( h 2 , h 1 ) \theta_4=\mathrm{Atan}2\left(h_2,h_1\right) θ4=Atan2(h2,h1)
当 θ 5 = 0 \theta_5=0 θ5=0时,机械臂处于奇异位形,关节4和关节6重合成一条直线,此时所有解都是 θ 4 \theta_4 θ4与 θ 6 \theta_6 θ6的和或差。在这种情况下 θ 4 \theta_4 θ4可以任意取值,但一般选择保持其当前值。
- matlab代码实现
%% theta4求解
h1=ax*cos(theta1)*cos(theta2+theta3)+ay*sin(theta1)*cos(theta2+theta3)+az*sin(theta2+theta3);
h2=ax*sin(theta1)-ay*cos(theta1);
s5sq=h1^2+h2^2; % 用sin(theta5)的平方作为判断机械臂是否处于奇异位形
% 需要判断theta5是否为0
% 这里判断theta5是否为0其实有点问题,因为当theta5接近0的时候就会出问题,所以这里选择判断sin(theta5)的平方是否小于某一特定值,若小于则认为theta5为0
% 当theta5=0时,theta4保持不变
% 当theta5≠0时,根据theta4可能取到两组值
if s5sq<0.0000001
theta4=q_r(4); %q_r(4)是上一步theta4的值
else
theta4_1=atan2(h2,h1);
theta4_2=atan2(-h2,-h1);
end
○ 求解 θ 5 \theta_5 θ5
将末端位姿描述矩阵写成
4 3 T − 1 3 2 T − 1 2 1 T − 1 1 0 T − 1 6 0 T = 6 5 T ( θ 6 ) 5 4 T ( θ 6 ) \ \ {
{_4^3}T}^{-1}\ {
{_3^2}T}^{-1}\ {
{_2^1}T}^{-1}\ {
{_1^0}T}^{-1}\ _6^0T=_6^5T\left(\theta_6\right)\ {_5^4}T\left(\theta_6\right) 43T−1 32T−1 21T−1 10T−1 60T=65T(θ6) 54T(θ6)
则
4 3 T − 1 3 2 T − 1 2 1 T − 1 1 0 T − 1 = [ s 1 s 4 + c 1 c 4 c 23 s 1 c 4 c 23 − c 1 s 4 c 4 s 23 − a 1 c 4 c 23 − a 2 c 3 c 4 − a 3 c 4 − d 1 c 4 s 23 s 1 c 4 − c 1 s 4 c 23 − s 1 s 4 c 23 − c 1 c 4 − s 4 s 23 a 1 s 4 c 23 + a 2 c 3 c 4 + a 3 s 4 + d 1 s 4 s 23 c 1 s 23 s 1 s 23 − c 23 − a 1 s 23 − a 2 s 3 + d 1 c 23 − d 4 0 0 0 1 ] \ {
{_4^3}T}^{-1}\ {
{_3^2}T}^{-1}\ {
{_2^1}T}^{-1}\ {
{_1^0}T}^{-1}=\\\left[\begin{matrix}s_1s_4+c_1c_4c_{23}&s_1c_4c_{23}-c_1s_4&c_4s_{23}&-a_1c_4c_{23}-a_2c_3c_4-a_3c_4-d_1c_4s_{23}\\s_1c_4-c_1s_4c_{23}&-s_1s_4c_{23}-c_1c_4&-s_4s_{23}&a_1s_4c_{23}+a_2c_3c_4+a_3s_4+d_1s_4s_{23}\\c_1s_{23}&s_1s_{23}&-c_{23}&-a_1s_{23}-a_2s_3+d_1c_{23}-d_4\\0&0&0&1\\\end{matrix}\right] 43T−1 32T−1 21T−1 10T−1=
s1s4+c1c4c23s1c4−c1s4c23c1s230s1c4c23−c1s4−s1s4c23−c1c4s1s230c4s23−s4s23−c230−a1c4c23−a2c3c4−a3c4−d1c4s23a1s4c23+a2c3c4+a3s4+d1s4s23−a1s23−a2s3+d1c23−d41
5 4 T ( θ 5 ) 6 5 T ( θ 6 ) = [ c 5 c 6 − c 5 s 6 s 5 0 s 6 c 6 0 0 − s 5 c 6 s 5 s 6 c 5 0 0 0 0 1 ] {_5^4}T\left(\theta_5\right)\ {_6^5}T\left(\theta_6\right)=\left[\begin{matrix}c_5c_6&-c_5s_6&s_5&0\\s_6&c_6&0&0\\-s_5c_6&s_5s_6&c_5&0\\0&0&0&1\\\end{matrix}\right] 54T(θ5) 65T(θ6)=
c5c6s6−s5c60−c5s6c6s5s60s50c500001
- 计算过程参考 θ 4 \theta_4 θ4的过程
结果如下
T_04_inv =
[
sin(Q1)*sin(Q4) + cos(Q1)*cos(Q2)*cos(Q3)*cos(Q4) - cos(Q1)*cos(Q4)*sin(Q2)*sin(Q3),
cos(Q2)*cos(Q3)*cos(Q4)*sin(Q1) - cos(Q1)*sin(Q4) - cos(Q4)*sin(Q1)*sin(Q2)*sin(Q3),
sin(Q2 + Q3)*cos(Q4),
-cos(Q4)*(a3 + a1*cos(Q2 + Q3) + d1*sin(Q2 + Q3) + a2*cos(Q3))
]
[
cos(Q4)*sin(Q1) - cos(Q1)*cos(Q2)*cos(Q3)*sin(Q4) + cos(Q1)*sin(Q2)*sin(Q3)*sin(Q4),
sin(Q1)*sin(Q2)*sin(Q3)*sin(Q4) - cos(Q2)*cos(Q3)*sin(Q1)*sin(Q4) - cos(Q1)*cos(Q4),
-sin(Q2 + Q3)*sin(Q4),
sin(Q4)*(a3 + a1*cos(Q2 + Q3) + d1*sin(Q2 + Q3) + a2*cos(Q3))
]
[
sin(Q2 + Q3)*cos(Q1),
sin(Q2 + Q3)*sin(Q1),
-cos(Q2 + Q3),
d1*cos(Q2 + Q3) - d4 - a1*sin(Q2 + Q3) - a2*sin(Q3)]
[0,0,0,1]
T_left =
[
nx*(sin(Q1)*sin(Q4) + cos(Q1)*cos(Q2)*cos(Q3)*cos(Q4) - cos(Q1)*cos(Q4)*sin(Q2)*sin(Q3)) - ny*(cos(Q1)*sin(Q4) - cos(Q2)*cos(Q3)*cos(Q4)*sin(Q1) + cos(Q4)*sin(Q1)*sin(Q2)*sin(Q3)) + nz*sin(Q2 + Q3)*cos(Q4),
ox*(sin(Q1)*sin(Q4) + cos(Q1)*cos(Q2)*cos(Q3)*cos(Q4) - cos(Q1)*cos(Q4)*sin(Q2)*sin(Q3)) - oy*(cos(Q1)*sin(Q4) - cos(Q2)*cos(Q3)*cos(Q4)*sin(Q1) + cos(Q4)*sin(Q1)*sin(Q2)*sin(Q3)) + oz*sin(Q2 + Q3)*cos(Q4),
ax*(sin(Q1)*sin(Q4) + cos(Q1)*cos(Q2)*cos(Q3)*cos(Q4) - cos(Q1)*cos(Q4)*sin(Q2)*sin(Q3)) - ay*(cos(Q1)*sin(Q4) - cos(Q2)*cos(Q3)*cos(Q4)*sin(Q1) + cos(Q4)*sin(Q1)*sin(Q2)*sin(Q3)) + az*sin(Q2 + Q3)*cos(Q4),
px*(sin(Q1)*sin(Q4) + cos(Q1)*cos(Q2)*cos(Q3)*cos(Q4) - cos(Q1)*cos(Q4)*sin(Q2)*sin(Q3)) - cos(Q4)*(a3 + a1*cos(Q2 + Q3) + d1*sin(Q2 + Q3) + a2*cos(Q3)) - py*(cos(Q1)*sin(Q4) - cos(Q2)*cos(Q3)*cos(Q4)*sin(Q1) + cos(Q4)*sin(Q1)*sin(Q2)*sin(Q3)) + pz*sin(Q2 + Q3)*cos(Q4)
]
[
nx*(cos(Q4)*sin(Q1) - cos(Q1)*cos(Q2)*cos(Q3)*sin(Q4) + cos(Q1)*sin(Q2)*sin(Q3)*sin(Q4)) - ny*(cos(Q1)*cos(Q4) + cos(Q2)*cos(Q3)*sin(Q1)*sin(Q4) - sin(Q1)*sin(Q2)*sin(Q3)*sin(Q4)) - nz*sin(Q2 + Q3)*sin(Q4),
ox*(cos(Q4)*sin(Q1) - cos(Q1)*cos(Q2)*cos(Q3)*sin(Q4) + cos(Q1)*sin(Q2)*sin(Q3)*sin(Q4)) - oy*(cos(Q1)*cos(Q4) + cos(Q2)*cos(Q3)*sin(Q1)*sin(Q4) - sin(Q1)*sin(Q2)*sin(Q3)*sin(Q4)) - oz*sin(Q2 + Q3)*sin(Q4),
ax*(cos(Q4)*sin(Q1) - cos(Q1)*cos(Q2)*cos(Q3)*sin(Q4) + cos(Q1)*sin(Q2)*sin(Q3)*sin(Q4)) - ay*(cos(Q1)*cos(Q4) + cos(Q2)*cos(Q3)*sin(Q1)*sin(Q4) - sin(Q1)*sin(Q2)*sin(Q3)*sin(Q4)) - az*sin(Q2 + Q3)*sin(Q4),
px*(cos(Q4)*sin(Q1) - cos(Q1)*cos(Q2)*cos(Q3)*sin(Q4) + cos(Q1)*sin(Q2)*sin(Q3)*sin(Q4)) + sin(Q4)*(a3 + a1*cos(Q2 + Q3) + d1*sin(Q2 + Q3) + a2*cos(Q3)) - py*(cos(Q1)*cos(Q4) + cos(Q2)*cos(Q3)*sin(Q1)*sin(Q4) - sin(Q1)*sin(Q2)*sin(Q3)*sin(Q4)) - pz*sin(Q2 + Q3)*sin(Q4)
]
[
ny*sin(Q2 + Q3)*sin(Q1) - nz*cos(Q2 + Q3) + nx*sin(Q2 + Q3)*cos(Q1),
oy*sin(Q2 + Q3)*sin(Q1) - oz*cos(Q2 + Q3) + ox*sin(Q2 + Q3)*cos(Q1),
ax*sin(Q2 + Q3)*cos(Q1) - az*cos(Q2 + Q3) + ay*sin(Q2 + Q3)*sin(Q1),
d1*cos(Q2 + Q3) - d4 - pz*cos(Q2 + Q3) - a1*sin(Q2 + Q3) - a2*sin(Q3) + py*sin(Q2 + Q3)*sin(Q1) + px*sin(Q2 + Q3)*cos(Q1)
]
[0,0,0,1]
T_46 =
[ cos(Q5)*cos(Q6), -cos(Q5)*sin(Q6), sin(Q5), 0]
[ sin(Q6), cos(Q6), 0, 0]
[-cos(Q6)*sin(Q5), sin(Q5)*sin(Q6), cos(Q5), 0]
[ 0, 0, 0, 1]
令元素(1,3)和(3,3)等号左右相等得到:
a x ( s 1 s 4 + c 1 c 4 c 23 ) + a y ( s 1 c 4 c 23 − c 1 s 4 ) + a z ( c 4 s 23 ) = s 5 a x ( c 1 s 23 ) + a y ( s 1 s 23 ) + a z ( − c 23 ) = c 5 a_x\left(s_1s_4+c_1c_4c_{23}\right)+a_y\left(s_1c_4c_{23}-c_1s_4\right)+a_z\left(c_4s_{23}\right)=s_5\\ a_x\left(c_1s_{23}\right)+a_y\left(s_1s_{23}\right)+a_z\left(-c_{23}\right)=c_5 ax(s1s4+c1c4c23)+ay(s1c4c23−c1s4)+az(c4s23)=s5ax(c1s23)+ay(s1s23)+az(−c23)=c5
令
p 1 = a x ( s 1 s 4 + c 1 c 4 c 23 ) + a y ( s 1 c 4 c 23 − c 1 s 4 ) + a z ( c 4 s 23 ) p 2 = a x ( c 1 s 23 ) + a y ( s 1 s 23 ) + a z ( − c 23 ) p_1=a_x\left(s_1s_4+c_1c_4c_{23}\right)+a_y\left(s_1c_4c_{23}-c_1s_4\right)+a_z\left(c_4s_{23}\right)\\ p_2=a_x\left(c_1s_{23}\right)+a_y\left(s_1s_{23}\right)+a_z\left(-c_{23}\right) p1=ax(s1s4+c1c4c23)+ay(s1c4c23−c1s4)+az(c4s23)p2=ax(c1s23)+ay(s1s23)+az(−c23)
则
θ 5 = A t a n 2 ( p 1 , p 2 ) \theta_5=\mathrm{Atan}2\left(p_1,p_2\right) θ5=Atan2(p1,p2)
- matlab代码实现
p1=ax*(sin(theta1)*sin(theta4)+cos(theta1)*cos(theta4)*cos(theta2+theta3))+...
ay*(sin(theta1)*cos(theta4)*cos(theta2+theta3)-cos(theta1)*sin(theta4))+...
az*cos(theta4)*sin(theta2+theta3);
p2=ax*cos(theta1)*sin(theta2+theta3)+ay*sin(theta1)*sin(theta2+theta3)-az*cos(theta2+theta3);
theta5_1=atan2(p1,p2);
theta5_2=atan2(-p1,-p2);
○ 求解 θ 6 \theta_6 θ6
将等式写成
5 4 T − 1 4 3 T − 1 3 2 T − 1 2 1 T − 1 1 0 T − 1 6 0 T = 6 5 T ( θ 6 ) \ {
{_5^4}T}^{-1}\ {
{_4^3}T}^{-1}\ {
{_3^2}T}^{-1}\ {
{_2^1}T}^{-1}\ {
{_1^0}T}^{-1}\ _6^0T=_6^5T\left(\theta_6\right) 54T−1 43T−1 32T−1 21T−1 10T−1 60T=65T(θ6)
记
5 4 T − 1 4 3 T − 1 3 2 T − 1 2 1 T − 1 1 0 T − 1 = [ m 11 m 12 m 13 m 14 m 21 m 22 m 23 m 24 m 31 m 32 m 33 m 34 0 0 0 1 ] \ {
{_5^4}T}^{-1}\ {
{_4^3}T}^{-1}\ {
{_3^2}T}^{-1}\ {
{_2^1}T}^{-1}\ {
{_1^0}T}^{-1}=\left[\begin{matrix}m_{11}&m_{12}&m_{13}&m_{14}\\m_{21}&m_{22}&m_{23}&m_{24}\\m_{31}&m_{32}&m_{33}&m_{34}\\0&0&0&1\\\end{matrix}\right] 54T−1 43T−1 32T−1 21T−1 10T−1=
m11m21m310m12m22m320m13m23m330m14m24m341
其中
m 11 = s 1 s 4 c 5 − c 1 s 5 s 23 + c 1 c 4 c 5 c 23 m 12 = − c 1 s 4 c 5 − s 1 s 5 s 23 + s 1 c 4 c 5 c 23 m 13 = s 5 c 23 + c 4 c 5 s 23 m 31 = s 1 c 4 − c 1 s 4 c 23 m 32 = − c 1 c 4 − s 1 s 4 c 23 m 33 = − s 4 s 23 \begin{aligned} m_{11}&=s_1s_4c_5-c_1s_5s_{23}+c_1c_4c_5c_{23}\\ m_{12}&=-c_1s_4c_5-s_1s_5s_{23}+s_1c_4c_5c_{23}\\ m_{13}&=s_5c_{23}+c_4c_5s_{23}\\ m_{31}&=s_1c_4-c_1s_4c_{23}\\ m_{32}&=-c_1c_4-s_1s_4c_{23}\\ m_{33}&=-s_4s_{23}\\ \end{aligned} m11m12m13m31m32m33=s1s4c5−c1s5s23+c1c4c5c23=−c1s4c5−s1s5s23+s1c4c5c23=s5c23+c4c5s23=s1c4−c1s4c23=−c1c4−s1s4c23=−s4s23
- 计算过程参考 θ 4 \theta_4 θ4的过程
结果如下
T_05_inv =
[
cos(Q5)*sin(Q1)*sin(Q4) - cos(Q1)*cos(Q2)*sin(Q3)*sin(Q5) - cos(Q1)*cos(Q3)*sin(Q2)*sin(Q5) - cos(Q1)*cos(Q4)*cos(Q5)*sin(Q2)*sin(Q3) + cos(Q1)*cos(Q2)*cos(Q3)*cos(Q4)*cos(Q5),
%=c5s1s4-c1c2s3s5-c1c3s2s5-c1c4c5s2s3+c1c2c3c4c5
%=c5s1s4-c1s5(c2s3+s2c3)+c1c4c5(c2c3-s2s3)
%=c5s1s4-c1s5s23+c1c4c5c23
cos(Q2)*cos(Q3)*cos(Q4)*cos(Q5)*sin(Q1) - cos(Q2)*sin(Q1)*sin(Q3)*sin(Q5) - cos(Q3)*sin(Q1)*sin(Q2)*sin(Q5) - cos(Q4)*cos(Q5)*sin(Q1)*sin(Q2)*sin(Q3) - cos(Q1)*cos(Q5)*sin(Q4),
%=c2c3c4c5s1-c2s1s3s5-c3s1s2s5-c4c5s1s2s3-c1c5s4
%=s1c4c5(c2c3-s2s3)-s1s5(s2c3+c2s3)-c1c5s4
%=s1c4c5c23-s1s5s23-c1c5s4
cos(Q2)*cos(Q3)*sin(Q5) - sin(Q2)*sin(Q3)*sin(Q5) + cos(Q2)*cos(Q4)*cos(Q5)*sin(Q3) + cos(Q3)*cos(Q4)*cos(Q5)*sin(Q2),
%=c2c3s5-s2s3s5+c2c4c5s3+c3c4c5s2
%=s5(c2c3-s2s3)+c4c5(c2s3+s2c3)
%=s5c23+c4c5s23
d4*sin(Q5) - a3*cos(Q4)*cos(Q5) + a2*sin(Q3)*sin(Q5) + d1*sin(Q2)*sin(Q3)*sin(Q5) - a2*cos(Q3)*cos(Q4)*cos(Q5) - d1*cos(Q2)*cos(Q3)*sin(Q5) + a1*cos(Q2)*sin(Q3)*sin(Q5) + a1*cos(Q3)*sin(Q2)*sin(Q5) - a1*cos(Q2)*cos(Q3)*cos(Q4)*cos(Q5) - d1*cos(Q2)*cos(Q4)*cos(Q5)*sin(Q3) - d1*cos(Q3)*cos(Q4)*cos(Q5)*sin(Q2) + a1*cos(Q4)*cos(Q5)*sin(Q2)*sin(Q3)
]
[
cos(Q1)*cos(Q4)*sin(Q2)*sin(Q3)*sin(Q5) - cos(Q1)*cos(Q2)*cos(Q5)*sin(Q3) - cos(Q1)*cos(Q3)*cos(Q5)*sin(Q2) - sin(Q1)*sin(Q4)*sin(Q5) - cos(Q1)*cos(Q2)*cos(Q3)*cos(Q4)*sin(Q5),
cos(Q1)*sin(Q4)*sin(Q5) - cos(Q2)*cos(Q5)*sin(Q1)*sin(Q3) - cos(Q3)*cos(Q5)*sin(Q1)*sin(Q2) - cos(Q2)*cos(Q3)*cos(Q4)*sin(Q1)*sin(Q5) + cos(Q4)*sin(Q1)*sin(Q2)*sin(Q3)*sin(Q5),
cos(Q2)*cos(Q3)*cos(Q5) - cos(Q5)*sin(Q2)*sin(Q3) - cos(Q2)*cos(Q4)*sin(Q3)*sin(Q5) - cos(Q3)*cos(Q4)*sin(Q2)*sin(Q5),
d4*cos(Q5) + a2*cos(Q5)*sin(Q3) + a3*cos(Q4)*sin(Q5) + d1*cos(Q5)*sin(Q2)*sin(Q3) - d1*cos(Q2)*cos(Q3)*cos(Q5) + a1*cos(Q2)*cos(Q5)*sin(Q3) + a1*cos(Q3)*cos(Q5)*sin(Q2) + a2*cos(Q3)*cos(Q4)*sin(Q5) + a1*cos(Q2)*cos(Q3)*cos(Q4)*sin(Q5) + d1*cos(Q2)*cos(Q4)*sin(Q3)*sin(Q5) + d1*cos(Q3)*cos(Q4)*sin(Q2)*sin(Q5) - a1*cos(Q4)*sin(Q2)*sin(Q3)*sin(Q5)
]
[
cos(Q4)*sin(Q1) - cos(Q1)*cos(Q2)*cos(Q3)*sin(Q4) + cos(Q1)*sin(Q2)*sin(Q3)*sin(Q4),
%=c4s1-c1c2c3s4+c1s2s3s4
%=s1c4-c1s4(c2c3-s2s3)
sin(Q1)*sin(Q2)*sin(Q3)*sin(Q4) - cos(Q2)*cos(Q3)*sin(Q1)*sin(Q4) - cos(Q1)*cos(Q4),
%=s1s2s3s4-c2c3s1s4-c1c4
%=-c1c4-s1s4c23
-sin(Q2 + Q3)*sin(Q4),
sin(Q4)*(a3 + a1*cos(Q2 + Q3) + d1*sin(Q2 + Q3) + a2*cos(Q3))
]
[0,0,0,1]
将以上结果带入()中,通过观察等式两边的矩阵,令元素(1,1)和(3,1)等号左右相等得到:
n x m 11 + n y m 12 + n z m 13 = c 6 n x m 31 + n y m 32 + n z m 33 = s 6 n_xm_{11}+n_ym_{12}+n_zm_{13}=c_6 n_xm_{31}+n_ym_{32}+n_zm_{33}=s_6 nxm11+nym12+nzm13=c6nxm31+nym32+nzm33=s6
这里就不放过程了
解得
θ 6 = A t a n 2 ( n x m 31 + n y m 32 + n z m 33 , n x m 11 + n y m 12 + n z m 13 ) \theta_6=\mathrm{Atan}2\left(n_xm_{31}+n_ym_{32}+n_zm_{33},n_xm_{11}+n_ym_{12}+n_zm_{13}\right) θ6=Atan2(nxm31+nym32+nzm33,nxm11+nym12+nzm13)
- matlab代码实现
%% theta6求解
m11=sin(theta1)*sin(theta4)*cos(theta5)-cos(theta1)*sin(theta5)*sin(theta2+theta3)+cos(theta1)*cos(theta4)*cos(theta5)*cos(theta2+theta3);
m12=-cos(theta1)*sin(theta4)*cos(theta5)-sin(theta1)*sin(theta5)*sin(theta2+theta3)+sin(theta1)*cos(theta4)*cos(theta5)*cos(theta2+theta3);
m13=sin(theta5)*cos(theta2+theta3)+cos(theta4)*cos(theta5)*sin(theta2+theta3);
m31=sin(theta1)*cos(theta4)-cos(theta1)*sin(theta4)*cos(theta2+theta3);
m32=-cos(theta1)*cos(theta4)-sin(theta1)*sin(theta4)*cos(theta2+theta3);
m33=-sin(theta4)*sin(theta2+theta3);
theta6_1=atan2(nx*m31+ny*m32+nz*m33,nx*m11+ny*m12+nz*m13);
theta6_2=atan2(-(nx*m31+ny*m32+nz*m33),-(nx*m11+ny*m12+nz*m13));
△ 三轴相交的Pieper解法
【等待补充。。。】
参考《机器人学导论》中内容
△ 机器人逆运动学多解的判断
【等待补充。。。】
可以参考
机器人雅可比矩阵
△ 机器人速度雅可比矩阵
关于雅可比矩阵的内容,说实话教材看得我一头雾水,感觉自己可能有阅读障碍综合征。。。。然后我在B站找到了这个教程,感觉很简洁实用
→→→【4-1机器人速度雅可比矩阵】
以下是我的学习笔记
○ 雅可比矩阵相关概念
- 雅可比矩阵概念
雅可比矩阵(Jacobian)是机器人操作空间速度与关节空间速度之间的线性映射关系,同时也可以表示两空间之间里的传递关系。
- 机器人末端位姿的表示
齐次变换矩阵

- 角度设定法
采用相对参考坐标系或相对运动坐标系作三次连续转动来规定姿态的方法
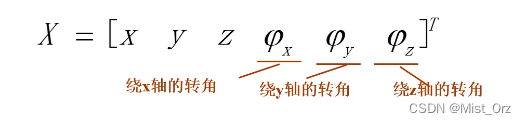
绕坐标系的转角正常来说就是欧拉角,是要考虑先后顺序的,但是这里的转角认为是与坐标轴的夹角
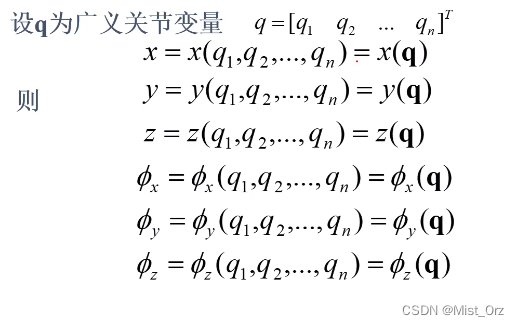
故用角度设定法表示机器人末端位姿时,机器人的运动学方程可写成

○ 以二连杆平面机器人举例说明雅可比矩阵
如图二连杆平面关节机器人
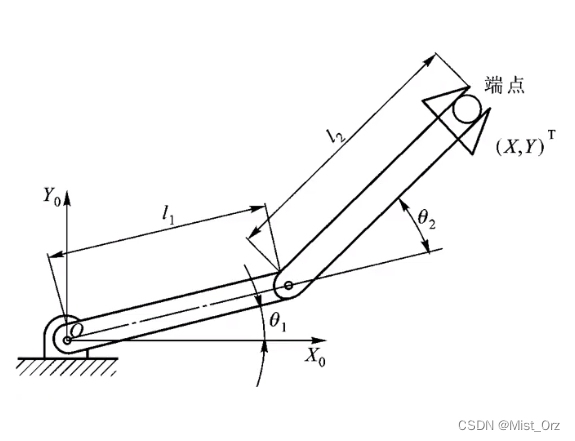
机器人末端位置可以表示为
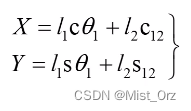
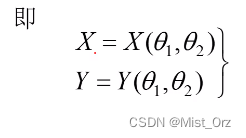
对改式求微分得
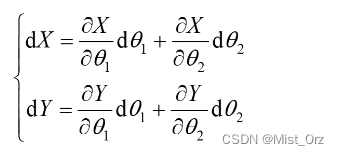
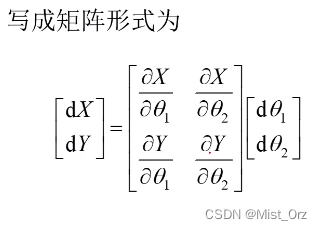
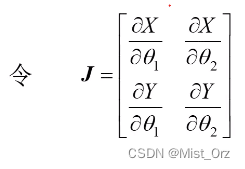
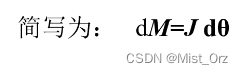
根据前面的式子可得
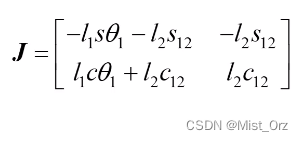
于是