前言
分别使用pcl和halcon 实现用平面来切点云,生成一段轮廓。
一、PCL实现
思路:
设计一个平面,遍历点云中的每个点,计算点云到这个平面的距离,如果再设定的范围内那么保存起来,如果不在那么就继续,然后用体素滤波取点一些砸点,最后用投影来拿到点云轮廓。
步骤:
1、计算点云到平面的距离,保存新的点云
// 用平面切割点云得到轮廓点云
int PlaneCutingPointCloud(CG_Plane &plane, pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud_in, float distance,pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud_out)
{
if (cloud_in->size()<3)
{
return -1;
}
float s = sqrt(pow(plane.A, 2) + pow(plane.B, 2) + pow(plane.C, 2));
if (s==0) {
return -1;
}
// 遍历点云
pcl::PointXYZRGB point;
for (size_t i = 0; i < cloud_in->size(); i++)
{
float x= cloud_in->points[i].x;
float y= cloud_in->points[i].y;
float z = cloud_in->points[i].z;
// 计算距离
float d =abs( (plane.A*x + plane.B*y + plane.C*z + plane.D) / s);
if (d<= distance)
{
point.x =x;
point.y = y;
point.z = z;
point.r = cloud_in->points[i].r;
point.g = cloud_in->points[i].g;
point.b = cloud_in->points[i].b;
cloud_out->push_back(point);
}
}
return 0;
}
2、体素滤波
pcl::PointCloud<pcl::PointXYZRGB> ::Ptr cloud3(new pcl::PointCloud<pcl::PointXYZRGB>);
pcl::VoxelGrid<pcl::PointXYZRGB> v;
v.setInputCloud(cloud);
v.setLeafSize(0.01f, 0.01f, 0.01f);
v.filter(*cloud3);
3、投影到平面
pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud_projected(new pcl::PointCloud<pcl::PointXYZRGB>);
// 使用一个平面模型ax + by + cz + d = 0,其中a,b,c,d为平面参数
// 分别对应下面四个通道,比如a = b =1,c = d=0,方程为x=-y,意味着投影在x=-y的平面上。
pcl::ModelCoefficients::Ptr coefficients(new pcl::ModelCoefficients());
coefficients->values.resize(4);
coefficients->values[0] = plane.A;
coefficients->values[1] = plane.B;
coefficients->values[2] = plane.C;
coefficients->values[3] = plane.D;
// ------------------------------投影到平面---------------------------------------
pcl::ProjectInliers<pcl::PointXYZRGB> proj;
proj.setModelType(pcl::SACMODEL_PLANE); //创建投影类型,投影到平面上
proj.setInputCloud(cloud2);
proj.setModelCoefficients(coefficients);
proj.filter(*cloud_projected);
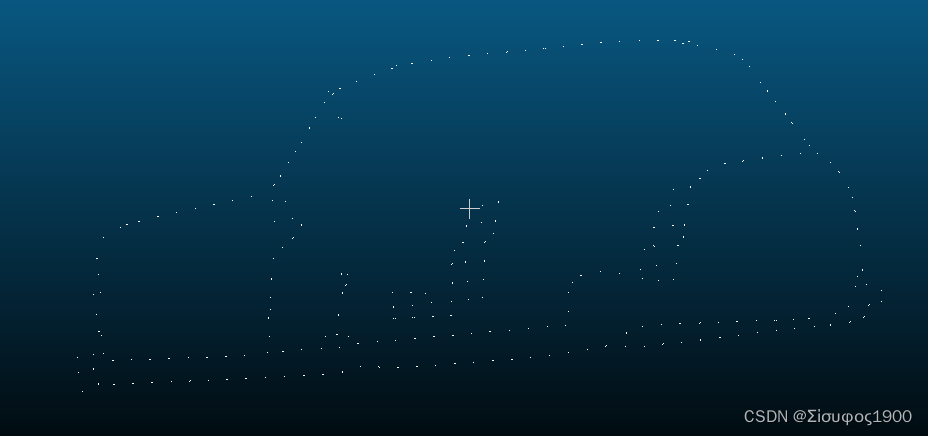
std::string filename_result22 = "C:\\Users\\Albert\\Desktop\\ContourProject.pcd";
pcl::io::savePCDFileBinaryCompressed(filename_result22, *cloud_projected);调用:
// 计算平面切点云的轮廓点云
int CalcPlaneCutingPointCloud()
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_src(new pcl::PointCloud<pcl::PointXYZ>);
if (pcl::io::loadPCDFile<pcl::PointXYZ>("C:\\Users\\Albert\\Desktop\\Mydreamcars.pcd", *cloud_src) == -1)
{
cout << "找不到点云,请重新加载!!!" << endl;
return -1;
}
cout << " 点云的原始个数: " << cloud_src->size() << endl;
pcl::PointCloud<pcl::PointXYZRGB> ::Ptr cloud(new pcl::PointCloud<pcl::PointXYZRGB>);
pcl::PointXYZRGB point;
for (size_t i = 0; i < cloud_src->size(); i++)
{
point.x = cloud_src->points[i].x;
point.y = cloud_src->points[i].y;
point.z = cloud_src->points[i].z;
point.r = 255;
point.g = 255;
point.b = 255;
cloud->push_back(point);
}
Eigen::Vector4f centroid;
pcl::compute3DCentroid(*cloud, centroid);
cout << " 点云的原始个数2: " << cloud->size() << endl;
if (cloud->size()<3)
{
return -1;
}
pcl::PointCloud<pcl::PointXYZRGB> ::Ptr cloud2(new pcl::PointCloud<pcl::PointXYZRGB>);
CG_Plane plane ;
plane.A = 1;
plane.B = 1;
plane.C = 1;
plane.D = -(plane.A*centroid[0] + plane.B*centroid[1] + plane.C*centroid[2]);
pcl::PointCloud<pcl::PointXYZRGB> ::Ptr cloud3(new pcl::PointCloud<pcl::PointXYZRGB>);
pcl::VoxelGrid<pcl::PointXYZRGB> v;
v.setInputCloud(cloud);
v.setLeafSize(0.01f, 0.01f, 0.01f);
v.filter(*cloud3);
std::string filename_result22333 = "C:\\Users\\Albert\\Desktop\\Filter.pcd";
pcl::io::savePCDFileBinaryCompressed(filename_result22333, *cloud3);
PlaneCutingPointCloud(plane, cloud3,0.006f, cloud2);
if (cloud2->size()<3)
{
return -1;
}
std::string filename_result = "C:\\Users\\Albert\\Desktop\\Contour.pcd";
pcl::io::savePCDFileBinaryCompressed(filename_result, *cloud2);
pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud_projected(new pcl::PointCloud<pcl::PointXYZRGB>);
// 使用一个平面模型ax + by + cz + d = 0,其中a,b,c,d为平面参数
// 分别对应下面四个通道,比如a = b =1,c = d=0,方程为x=-y,意味着投影在x=-y的平面上。
pcl::ModelCoefficients::Ptr coefficients(new pcl::ModelCoefficients());
coefficients->values.resize(4);
coefficients->values[0] = plane.A;
coefficients->values[1] = plane.B;
coefficients->values[2] = plane.C;
coefficients->values[3] = plane.D;
// ------------------------------投影到平面---------------------------------------
pcl::ProjectInliers<pcl::PointXYZRGB> proj;
proj.setModelType(pcl::SACMODEL_PLANE); //创建投影类型,投影到平面上
proj.setInputCloud(cloud2);
proj.setModelCoefficients(coefficients);
proj.filter(*cloud_projected);
std::string filename_result22 = "C:\\Users\\Albert\\Desktop\\ContourProject.pcd";
pcl::io::savePCDFileBinaryCompressed(filename_result22, *cloud_projected);
return 0;
}
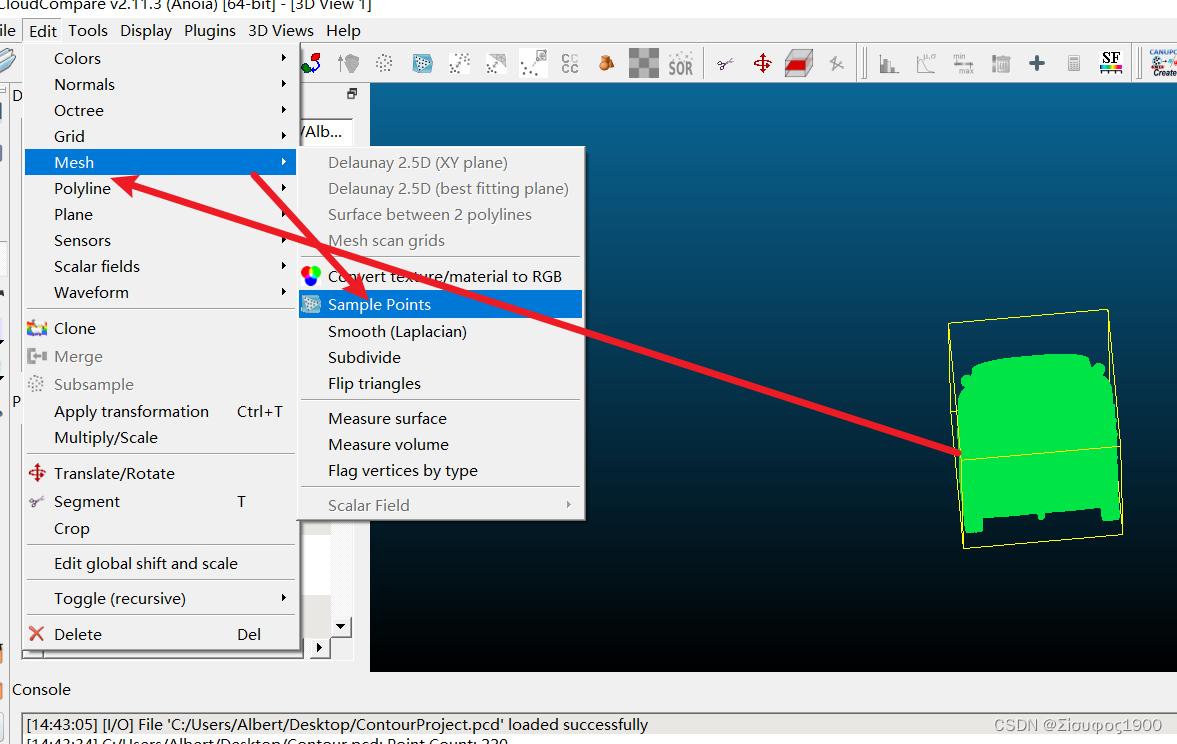
CC技巧:将mesh 的模型转换成点云
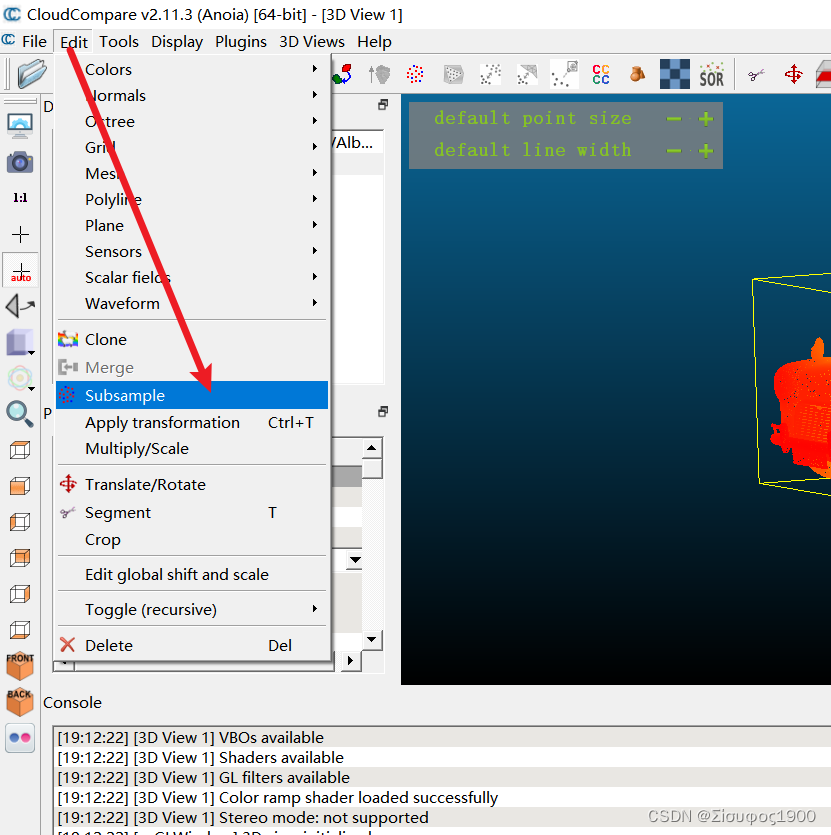
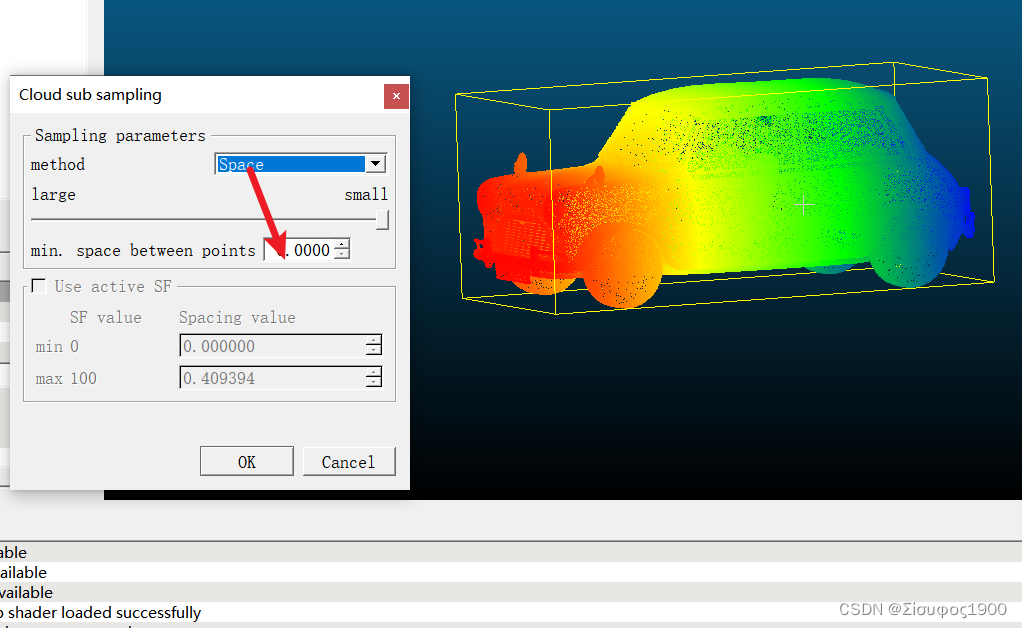
cc下采样:
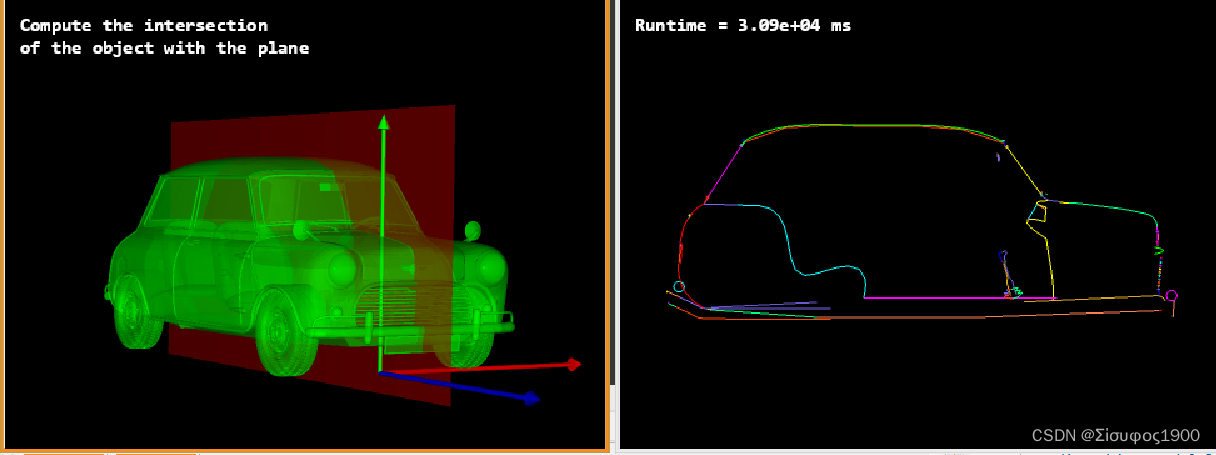
二、Halcon 实现
halcon案例
intersect_plane_object_model_3d.hdev
Halcon 代码:
* ********************************************************************
* This program shows how to calculate the intersection between a
* 3D object model and a plane.
* The intersection is calculated with the operator
* intersect_plane_object_model.
* The result of the intersection is a set of polylines.
* ********************************************************************
*
* Read 3D object model
Files := ['bmc_mini','glass_mug']
*
* Prepare visualization
dev_update_off ()
dev_close_window ()
*
gen_cam_par_area_scan_division (0.01, 0, 7e-6, 7e-6, 240, 180, 480, 360, CamParam)
get_cam_par_data (CamParam, 'image_width', ImageWidth)
get_cam_par_data (CamParam, 'image_height', ImageHeight)
dev_open_window (0, 0, ImageWidth, ImageHeight, 'black', WindowHandle1)
set_display_font (WindowHandle1, 14, 'mono', 'true', 'false')
dev_open_window (0, ImageWidth + 12, ImageWidth, ImageHeight, 'black', WindowHandle2)
set_display_font (WindowHandle2, 14, 'mono', 'true', 'false')
* Poses for car object
create_pose (0.05, 0.10, 1.2, 181.4, 30.6, 359.0, 'Rp+T', 'gba', 'point', VisualizationPose)
create_pose (0.12, 0.08, 1.2, 180.0, 90.0, 0.0, 'Rp+T', 'gba', 'point', PoseConnected)
create_pose (0, 0, 0, 0, 90, 0, 'Rp+T', 'gba', 'point', CutPlanePose)
Border := 0.03
* Poses for mug object
VisualizationPose := [VisualizationPose,6.5e-005,-0.15e-3,8.1e-3,120.0,0.0,30.0,0]
CutPlanePose := [CutPlanePose,0,0,0,70,0,0,0]
PoseConnected := [PoseConnected,0.0,-0.1e-3,6.0e-3,90.0,0.0,0.0,0]
Border := [Border,0.0003]
*
GenParamName := ['color_0','attribute_0','disp_pose_0','light_position']
GenParamValue := ['green','faces','true','0.0 0.0 100.0 1.0']
GenParamName := [GenParamName,'color_1','disp_pose_1','alpha']
GenParamValue := [GenParamValue,'red','false',.5]
ColorSytle := ['colored','color']
ColorValue := [12,'green']
*
* Compute the interection of a 3d object model with a plane
* successively with two different Object models.
for Index := 0 to |Files| - 1 by 1
*
* Read a 3d object model
read_object_model_3d (Files[Index], 'mm', [], [], ObjectModel3D, Status)
*
* Compute the intersection of the object with the plane
* and calculate the connected components.
CurrentCutPlanePose := CutPlanePose[Index * 7:Index * 7 + 6]
count_seconds (Seconds)
triangulate_object_model_3d (ObjectModel3D, 'greedy', [], [], TriangulatedObjectModel3D, Information)
intersect_plane_object_model_3d (ObjectModel3D, CurrentCutPlanePose, ObjectModel3DIntersection)
count_seconds (Seconds1)
stop ()
connection_object_model_3d (ObjectModel3DIntersection, 'lines', 1, ObjectModel3DConnected)
*
* Display results
*
* Calculate plane extents for visualization
pose_invert (CurrentCutPlanePose, PoseInvert)
rigid_trans_object_model_3d (ObjectModel3DIntersection, PoseInvert, ObjectModel3DRigidTrans)
*
get_object_model_3d_params (ObjectModel3DRigidTrans, 'bounding_box1', Param1)
X := [Param1[0] - Border[Index],Param1[0] - Border[Index],Param1[3] + Border[Index],Param1[3] + Border[Index]]
Y := [Param1[1] - Border[Index],Param1[4] + Border[Index],Param1[4] + Border[Index],Param1[1] - Border[Index]]
* Generate plane to visualize the intersecting plane
gen_plane_object_model_3d (CurrentCutPlanePose, X, Y, ObjectModel3DPlane)
* Visualize the scene
Message := ['Compute the intersection','of the object with the plane']
disp_object_model_3d_safe (WindowHandle1, [ObjectModel3D,ObjectModel3DPlane], CamParam, VisualizationPose[Index * 7:Index * 7 + 6], GenParamName, GenParamValue)
disp_message (WindowHandle1, Message, 'window', 12, 12, 'white', 'false')
* Display the intersection of the object with the plane
get_object_model_3d_params (ObjectModel3DIntersection, 'num_points', NumPoints)
if (NumPoints > 0)
disp_object_model_3d_safe (WindowHandle2, ObjectModel3DConnected, CamParam, PoseConnected[Index * 7:Index * 7 + 6], ['disp_lines',ColorSytle[Index]], ['true',ColorValue[Index]])
disp_message (WindowHandle2, 'Runtime = ' + ((Seconds1 - Seconds) * 1e3)$'.3' + ' ms', 'window', 12, 12, 'white', 'false')
else
Message := 'The intersection of the object with the plane is empty!'
disp_message (WindowHandle1, Message, 'window', 12, 12, 'white', 'false')
endif
*
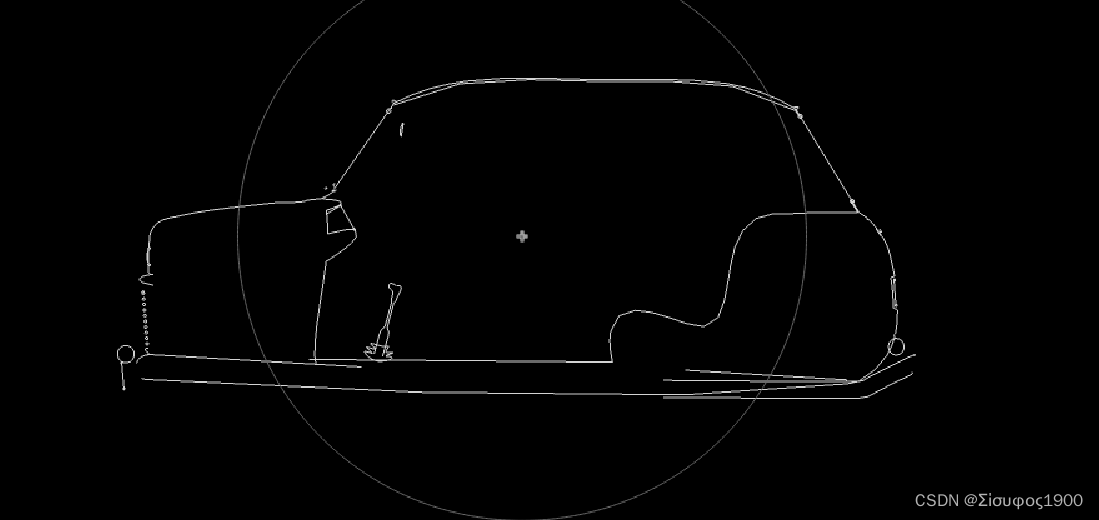
* It is also possible to project the resulting 3D lines into the
* intersection plane and to convert these planar lines into XLD
* contours.
project_object_model_3d_lines_to_contour_xld (Intersection, CurrentCutPlanePose, ObjectModel3DIntersection)
* Depending on the scale and position of the 3D object, a
* transformation of the contours might be required for a suitable
* visualization. The transformation parameters are determinde based
* on the extent of the intersection contours.
determine_transformation_parameters (Intersection, ImageHeight, ImageWidth, 0.1, HomMat2D)
affine_trans_contour_xld (Intersection, ContoursAffineTrans, HomMat2D)
*
if (Index < |Files| - 1)
disp_continue_message (WindowHandle2, 'black', 'true')
stop ()
endif
endfor