PCL 小结
1. PCL viewer
用来可视化三维点云或者得到的二维图像,详见官方教程
2. 点云数据格式
2.1 Introduction
点云基础的类型类似一个vector,每个元素表示一个多维的点信息(坐标,Normal,RGB,Intensity 等等)。
2.2 优化的格式
2.2.1 KD-tree
k-d tree decomposition for the point set : (2,3), (5,4), (9,6), (4,7), (8,1), (7,2)。(来自维基)

2.2.2 Octree 八叉树
用来在三维的情况规划点云数据,目的和kd-tree一致。
2.2.3 优点
如果单纯的使用vector来搜索邻近的点,那么需要对整个数列做穷举。对大量点云的数据来说,这个过程极其耗费时间与资源。但是如果用类似上述的特殊数据结构,那么对邻近点的搜索就变得非常的简单优美了。
3. 特征点的描述
| 算法 | 全局性 | 适用情况 |
|---|---|---|
| PFH(point feature histograms) | 局部特征 | |
| 手机 | $12 | |
| 导管 | $1 |
3.1 PFH(point feature histograms)
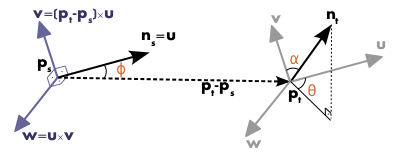
- 查询点 , 去半径为r的球其中有k个点的临域。
- 计算临域中每对点的关系图(如上图所示)
