经过对很多方法的测试,终于搞出来一个有效的方法,见以下连接:
--------------分割线---------------
0.环境配置
按照连接中的方法进行配置即可。
遇到的问题
问题1
在安装ros的时候注意ubuntu操作系统版本,librealsense2与驱动和 realsense-ros 包版本,有可能会出现 realsense-ros 包版本编译失败的情况,需要更改realsense-ros/realsense2_camera/下CMakeLists.txt的第44行为自己安装的librealsense2版本号,我的是2.45.0。

问题2
参考连接:https://blog.csdn.net/weixin_41837701/article/details/122668376?spm=1001.2014.3001.5502
1. 启动 realsense 相机
roslaunch realsense2_camera rs_rgbd.launch
2. 启动 rgbd_ros_to_lcm 节点
roslaunch rgbd_ros_to_lcm lcm_republisher.launch
3. record
在任意目录下建立 /data/logs 一个日志文件夹,如:

运行如下命令
lcm-logger
运行结束后会生成文件
lcmlog.2020-*
裁剪
在该目录下打开终端,输入run_trim脚本所在的文件夹以及该文件,如:
/home/lab502/LabelFusion/scripts/bin/run_trim
之后会在终端提示输入起始时间与结束时间:
 奇怪的是我的文件夹中没有trimmedlog.lcmlog文件,不知道怎么回事。
奇怪的是我的文件夹中没有trimmedlog.lcmlog文件,不知道怎么回事。
补充
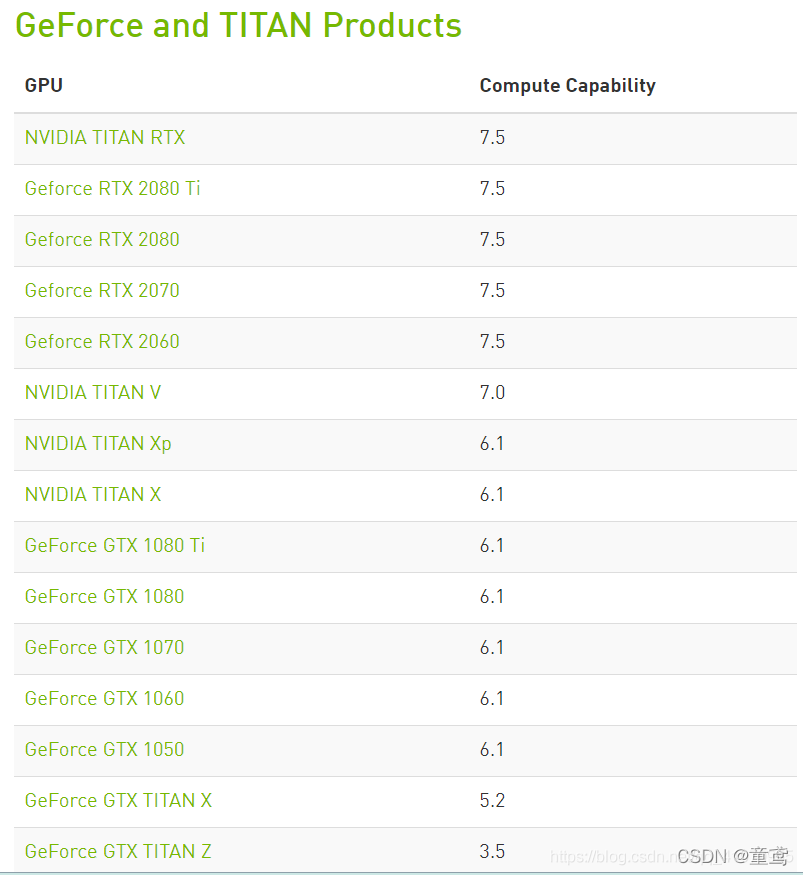
裁剪过程其实可以在labelfusion官方提供的docker中进行,不会报错。但是在运行run_prep命令时会这个链接中Q2的错误,分析原因,大致是这样的,我的电脑显卡是NVIDIA TITAN RTX显卡,对照下表可知,我的显卡算力为7.5.而官方的docker里面安装的是cuda8.*,最大支持算力为6.1,所以会出问题。
针对这个问题,我的解决方案是:不弄了…
尝试用ObjectDatasetTools方法,且跑通了。