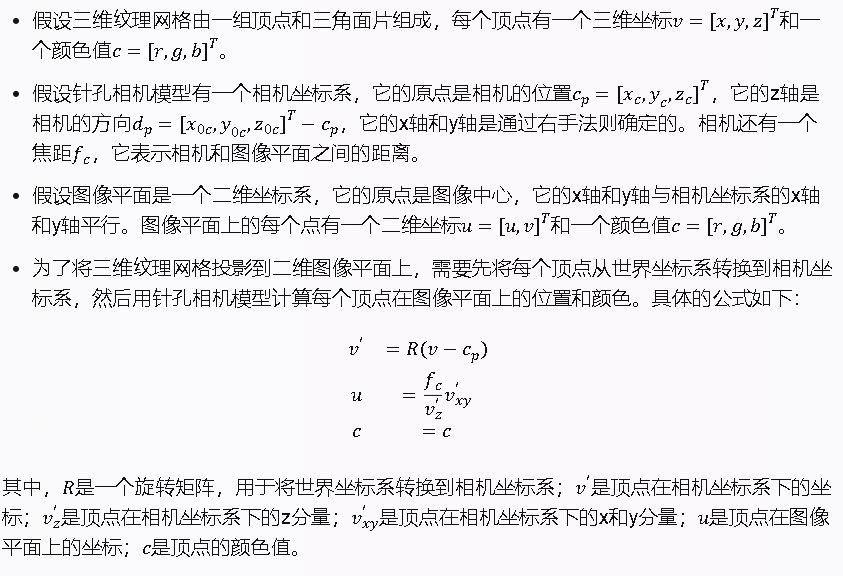
针孔相机模型来将三维纹理网格投影到二维图像平面上。

------------------------------------------------------------------------------------------------------------------------

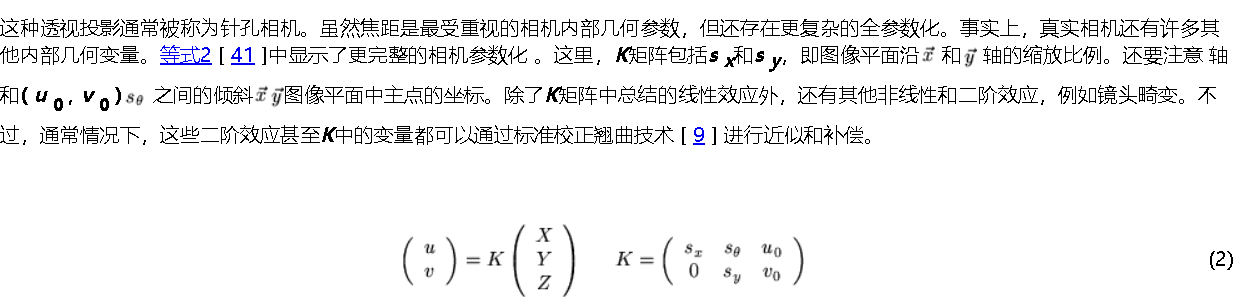
大多数运动结构(线性和非线性)技术都是从假设透视投影模型开始的,如图 3所示,该模型可以追溯到 Durer 和文艺复兴时期的画家。替代投影模型包括副透视或正交案例。在这里,三个 3D 特征点投影到图像平面 (透视光线起源于投影中心(COP),位于物理相机内。坐标系的原点传统上取 COP 和焦距,f是 COP 沿主轴(或光轴)到图像平面的距离). 光轴传统上与 轴对齐。COP 沿光轴在像平面上的投影称为主点。
扫描二维码关注公众号,回复:
15448325 查看本文章

透视相机模型是一种常用的相机模型,它假设相机的光心在原点,相机的主轴与 z 轴平行,相机的焦距是一个固定的常数。我们用 f 表示相机的焦距,它是一个经验选择的参数。我们用 p 表示 3D 人脸的姿态,它由旋转 R 和平移 t 组成。旋转 R 是一个 3×3 的正交矩阵,它表示了 3D 人脸绕着原点的旋转角度。平移 t 是一个 3 维的向量,它表示了 3D 人脸沿着各个轴的平移距离。我们用 X 表示 3D 人脸上的一个顶点,它是一个三维的向量。我们用 x 表示这个顶点在 2D 图像上的投影,它是一个二维的向量。那么,这个顶点和它的投影之间的关系可以用下面的公式表示: