本内容为slam学习中所涉及的关于相机模型基础知识整理。
一.针孔相机模型与图像
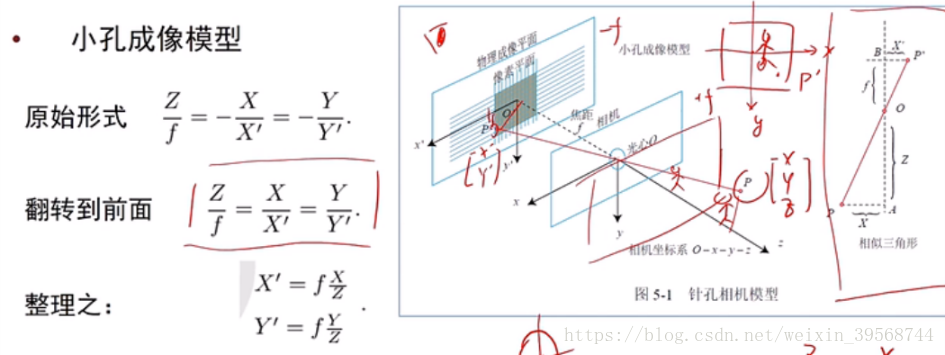
照片记录了真实世界在成像平面上的投影,这个过程丢弃了“距离”维度上的信息,普通相机可以用针孔模型很好的近似。
小孔成像模型:就是初高中物理讲过的成像原理
由于成像平面的坐标系是在图像的中心并且像素的排布是一个离散的过程,所以从成像平面到像素坐标还要进行以下转化过程:

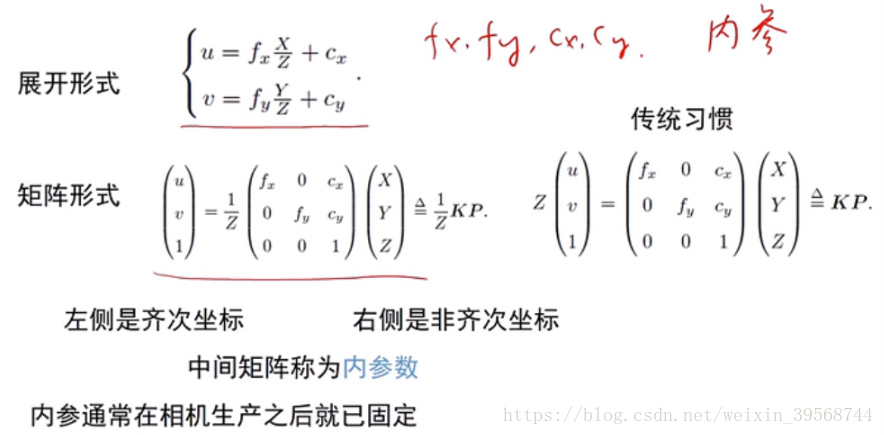
这里补充一个齐次坐标系的知识,之前学线代时经常用到齐次非齐次的概念,可是当看到上图中左右两个不同的坐标时没有理解为什么一个是齐次一个是非齐次的,所以百度了一下深入理解一下这个概念。
https://www.zhihu.com/question/59595799/answer/301242100
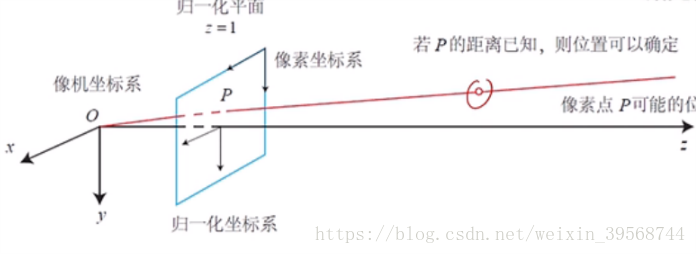
言归正传,由此可以看出同一直线上的投影点扔是同一个。
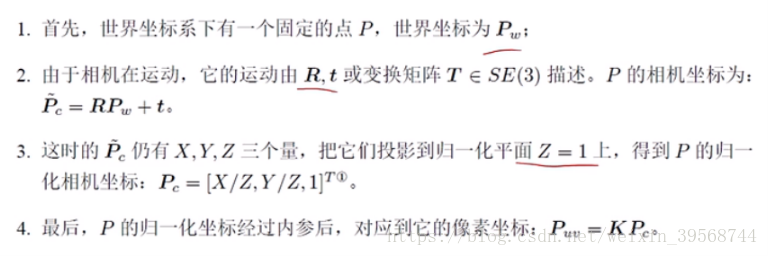
除了内参外,像极坐标系与世界坐标系还相差一个变换:
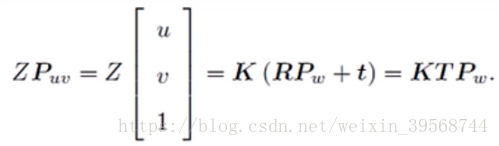
这里的R,t或T称为外参(注:右侧式子隐含了一次非齐次到齐次的变换),这个外参就是SLAM估计的目标。
下面整理一下投影顺序:世界-----相机-------归一化平面-------像素(激光模型要更加简单,因为激光直接能够获得距离)
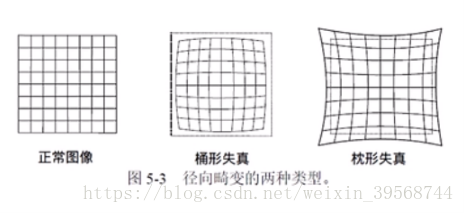
针孔前的镜头会引入畸变,下面来介绍一下畸变:
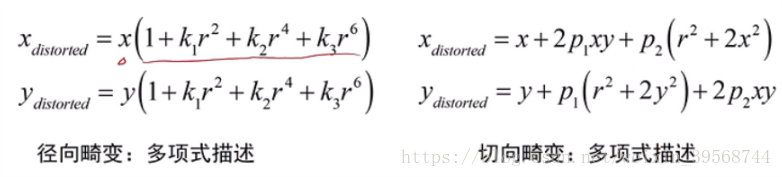
主要的畸变类型有:径向畸变和切向畸变
那么怎么建立数学模型去表示畸变后的坐标呢?畸变可以用归一化坐标的变换来描述:
最后再整理一下针孔相机模型成像的整个过程:
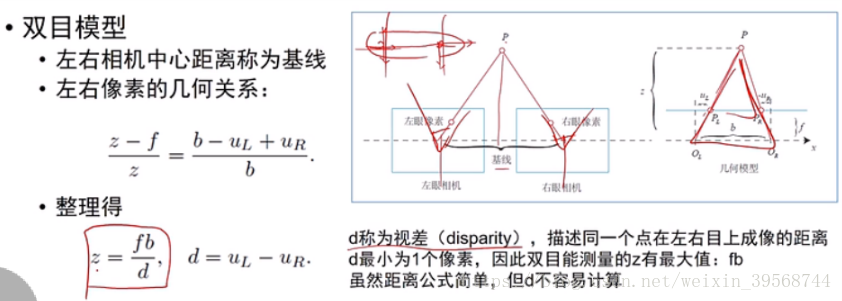
下面介绍双目相机成像模型:
除了单目双目外再介绍一下用物理手段测量深度的RGBD相机:
主要分为ToF或结构光两种主要原理,通常能够得到与RGB图对应的深度图。