版权声明:本文为博主原创文章,未经博主允许不得转载。 https://blog.csdn.net/HERO_CJN/article/details/83999759

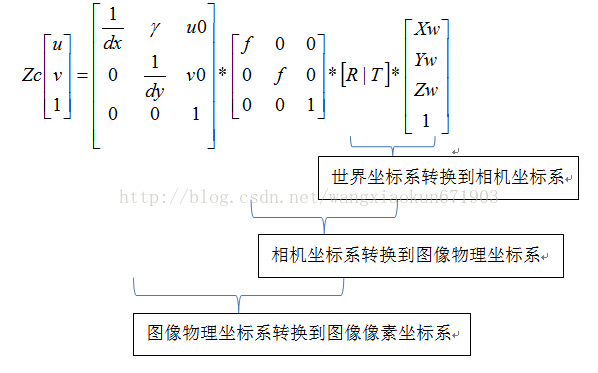
1、 世界坐标系通过外参矩阵转换到相机坐标系

2、 相机坐标系通过焦距对角矩阵转换到图像物理坐标系

由图相似三角形可得:

矩阵形式为:

![]()
3、 图像物理坐标系通过像素转换矩阵转换到像素坐标系中

dx和dy表示:x方向和y方向的一个像素分别占多少个(可是小数)长度单位。u0,v0表示图像的中心像素坐标和图像原点像素坐标之间相差的横向和纵向像素数。
4、转换过程总公式如下