转自:https://blog.csdn.net/wangxiaokun671903/article/details/38322771
原作者: wangxiaokun671903
P为空间中的点,P1和P2是点P在左右像平面上的成像点,f是焦距,OR和OT是左右相机的光心。由下图可见左右两个相机的光轴是平行的。XR和XT是两个成像点在左右两个像面上距离图像左边缘的距离。
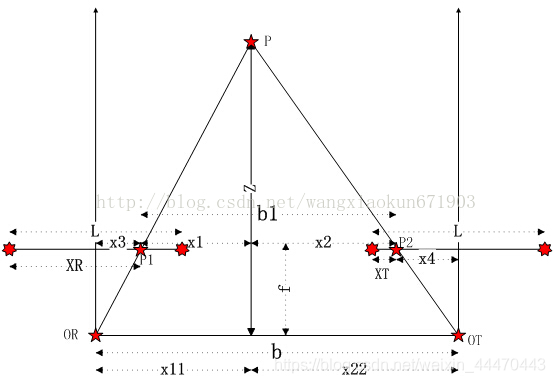
若两个相机已经校正完成即达到极线平行,两条光轴方向也平行。则视差和物体深度的关系式如下:
zb=Z−f(b+XT)−XR
可以推导到:
Z=XR−XTb∗f=db∗f
证明过程:
1.已知:
x1+x2=b1
x11+x22=b
并且左右图像的宽度都是L
2.根据相似三角形的原理可以推出:
zx11=Z−fx1
zx22=Z−fx2
将两个式子相加可以得出:
zx11+x22=zb=Z−fx1+x2=Z−fb
其中
b1可以用
b,
XR,
XT表示
b1=b−x3−x4=b−(XR−2L)−(2L−XT)
b1=b−XR+XT=(b+XT)−XR
故可求得上面的等式。