1 安装ROS
具体可参考其他教程
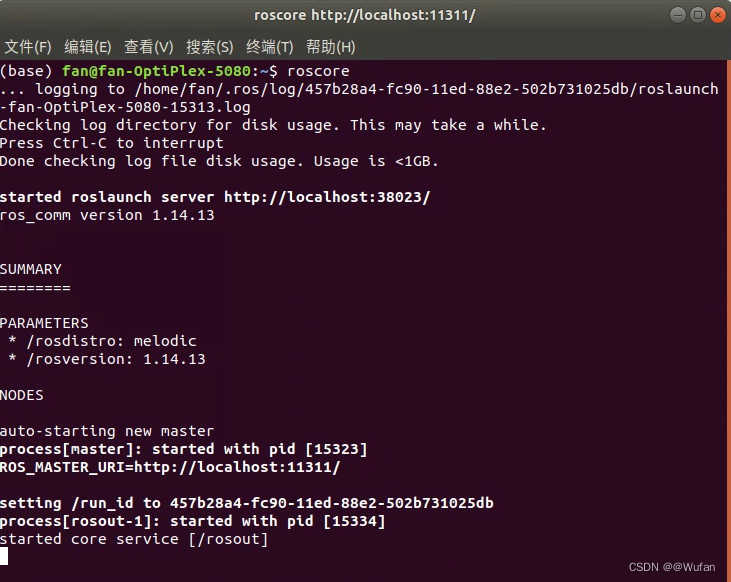
2 启动ROS
打开终端1,输入roscore启动ros,如下图所示
roscore
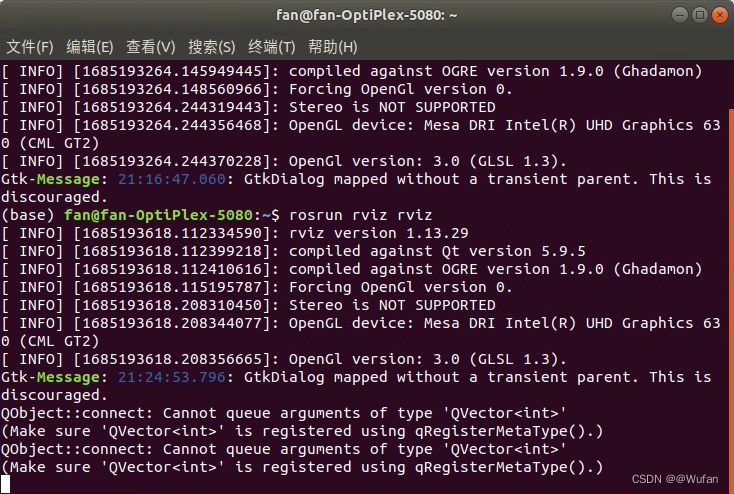
3 打开rviz
打开终端2,输入rosrun rviz rviz,如下图所示
rosrun rviz rviz
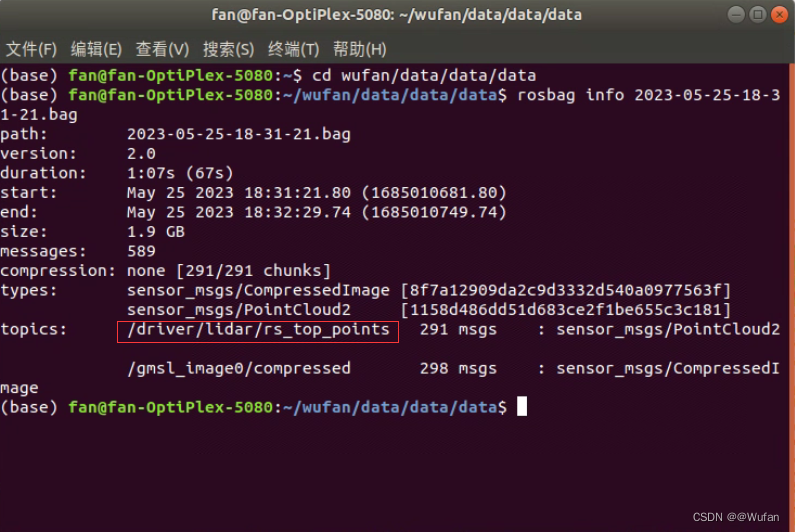
4 查看bag包信息
打开终端3,执行rosbag info your_bag_file_name.bag查看topic信息,如下图所示
rosbag info yourbagname.bag
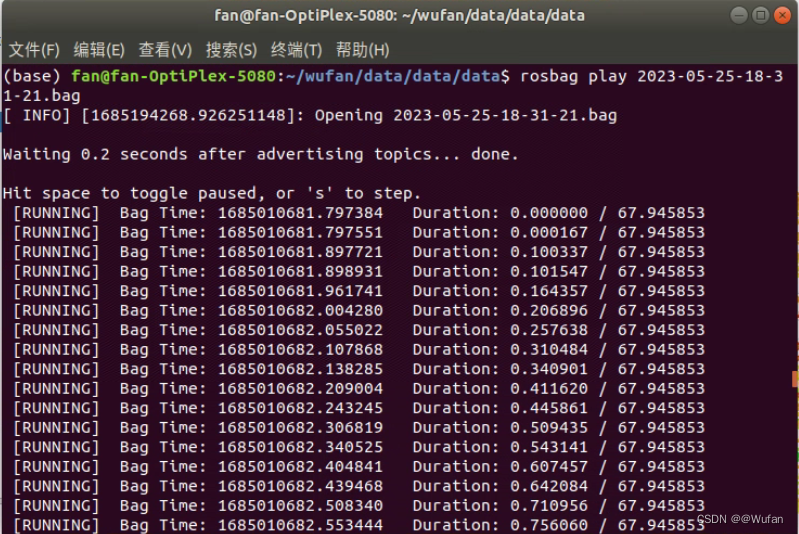
6 本地发布bag包的点云信息
如下图所示
rosbag play yourbagname.bag
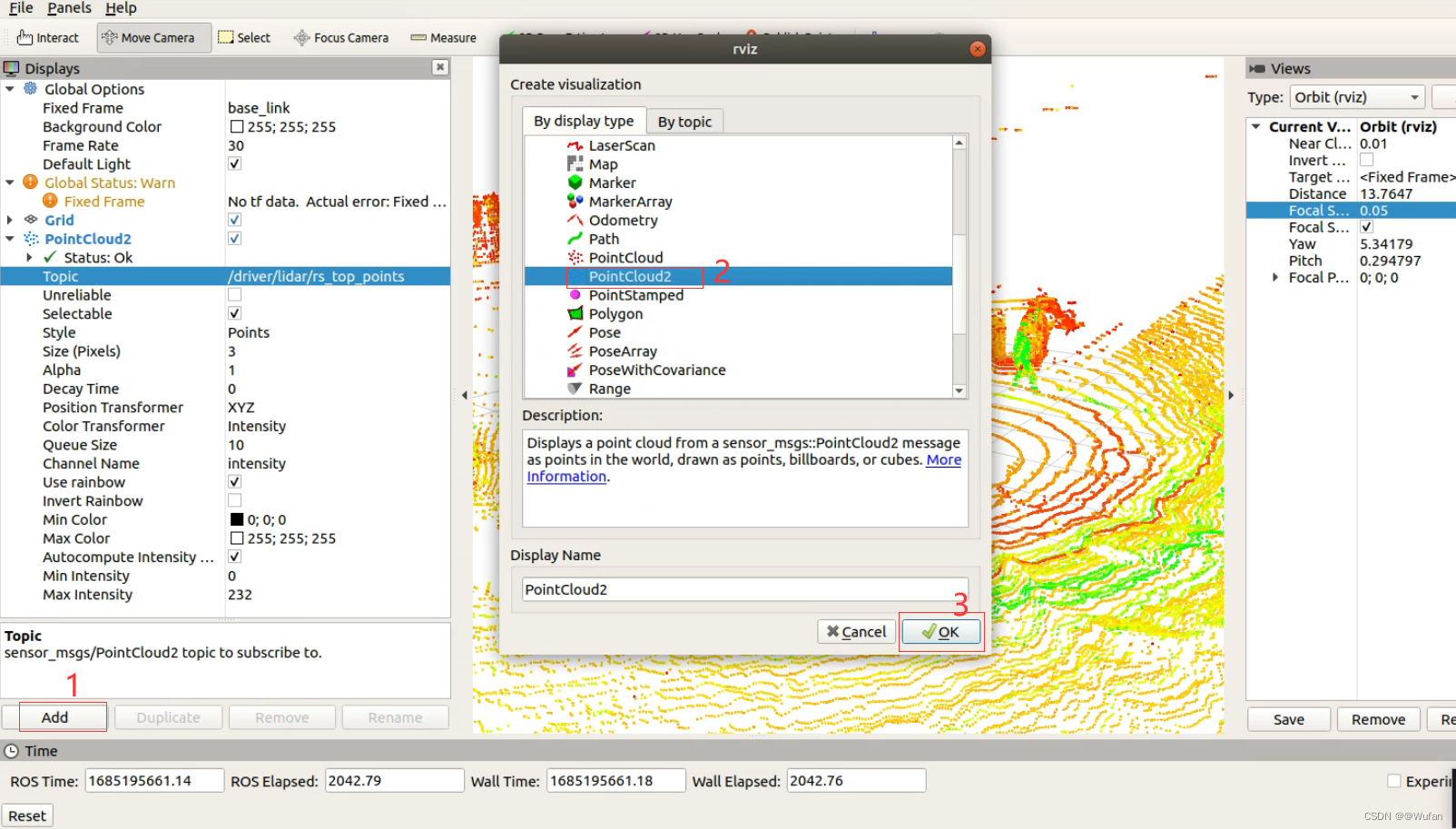
5 读取bag包
1)点击左下角添加按钮:Add,选择by display type 中的 PointCloud2,点击ok;
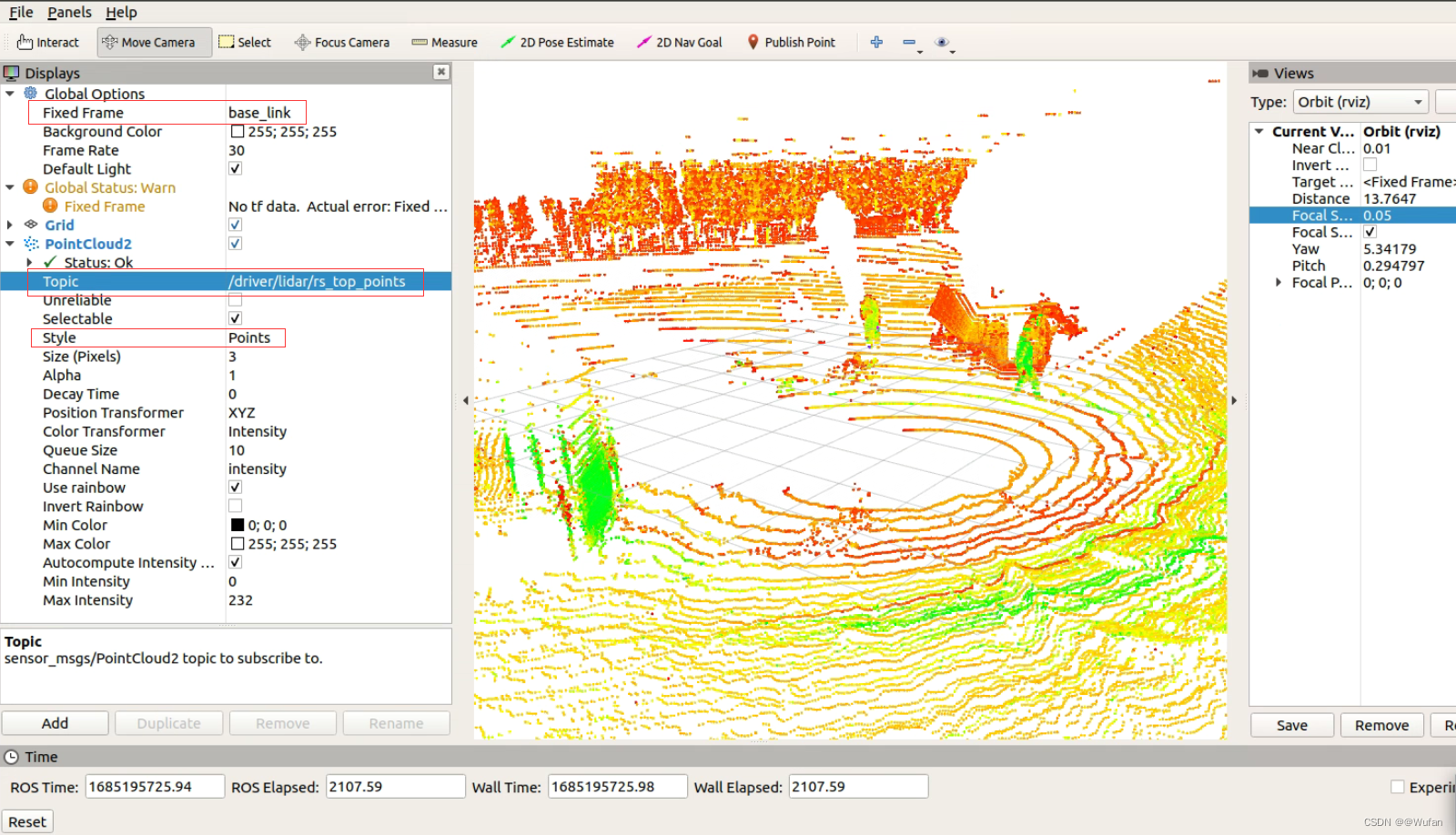
2)修改Fixed Feame为base_link;
3)修改Topic为bag对应Topic;
4)修改Style为Points。(点云的形式)
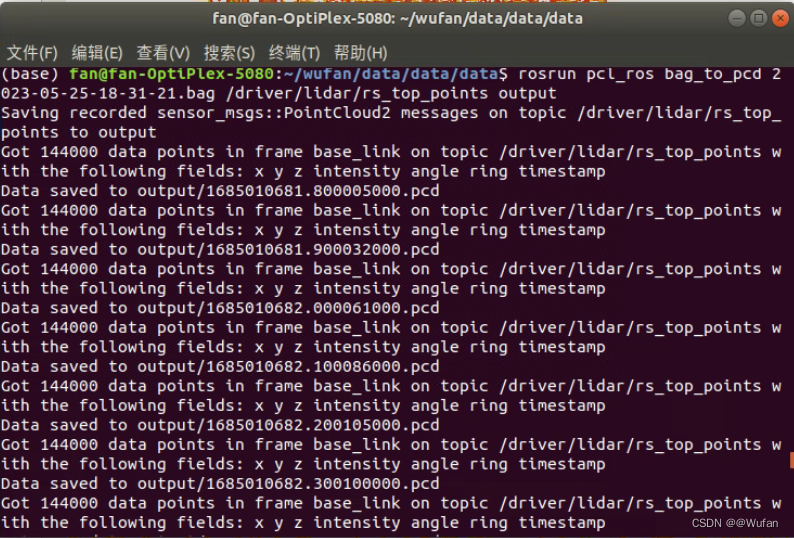
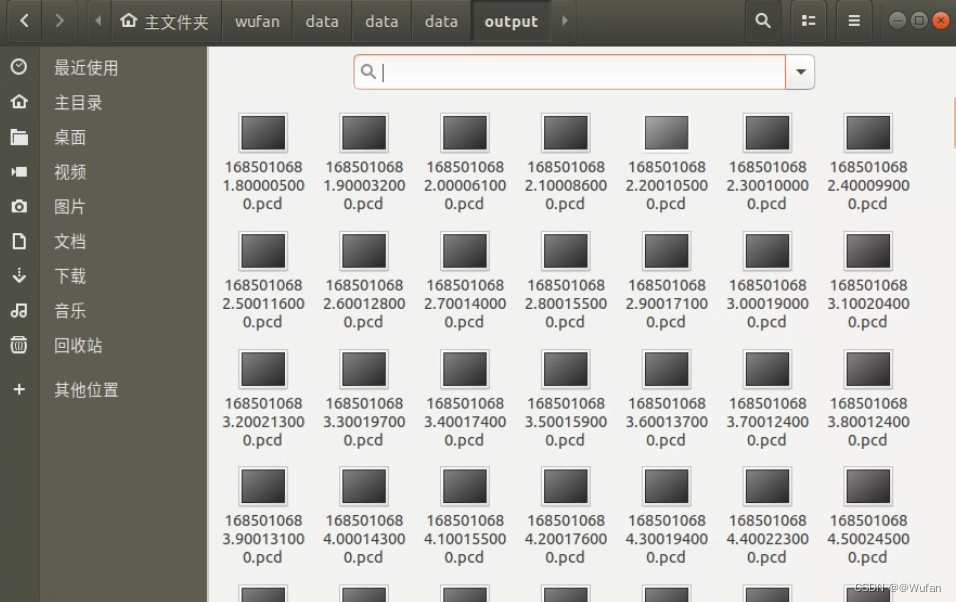
6 将bag数据转为pcd格式
rosrun pcl_ros bag_to_pcd yourbagname.bag yourbagtopic outputpath
yourbagname.bag:你的bag文件
yourbagtopic:你的bag文件对应的topic
outputpath:pcd点云保存路径