0. 简介
对于3d bounding box而言,近几年随着自动驾驶的火热,其标注工具也日渐多了起来,本篇文章不讲具体的算法,这里主要聚焦于这些开源的3d bounding box标注工具,以及他们是怎么使用的。这里借鉴了我想静静,博主的博客作为基础,然后再结合自己的使用与了解完成扩充。
1. 3d-bat
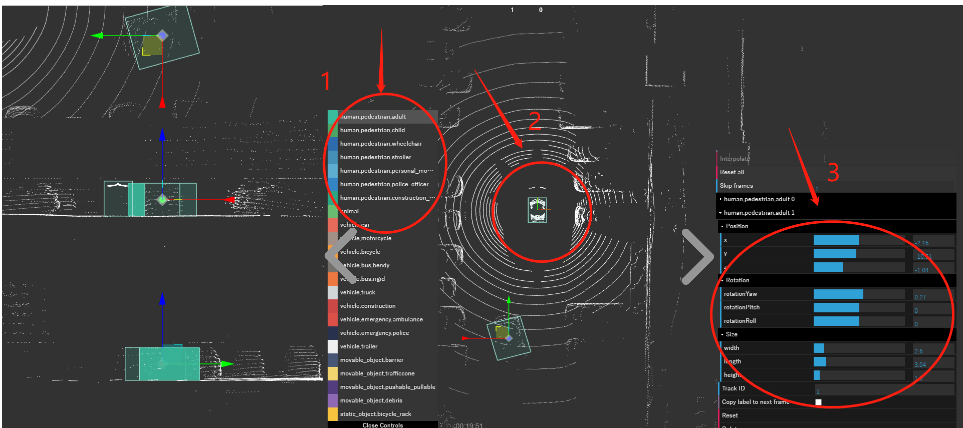
在本文中,我们专注于在新型 3D 边界框注释工具箱 (3D BAT) 的帮助下获取 2D 和 3D 标签,以及道路上物体的轨迹 ID。 我们基于 Web 的开源 3D BAT 包含多项智能功能,以提高可用性和效率。例如,此注释工具箱支持使用插值对轨迹进行半自动标记,这对于跟踪、运动规划和运动预测等下游任务至关重要。
此外,通过将注释从 3D 空间投影到图像域中,可以自动获得所有相机图像的注释。除了原始图像和点云馈送外,还提供由顶视图(鸟瞰图)、侧视图和前视图组成的主视图,可用于从不同角度观察感兴趣的对象。 我们的方法与其他公开可用的注释工具的比较表明,使用我们的工具箱可以更快、更有效地获得 3D 注释。支持点云渲染,2D 俯视图,立方体标注,下面这篇文章讲了具体的使用与安装方法
2. point-cloud-annotation-tool
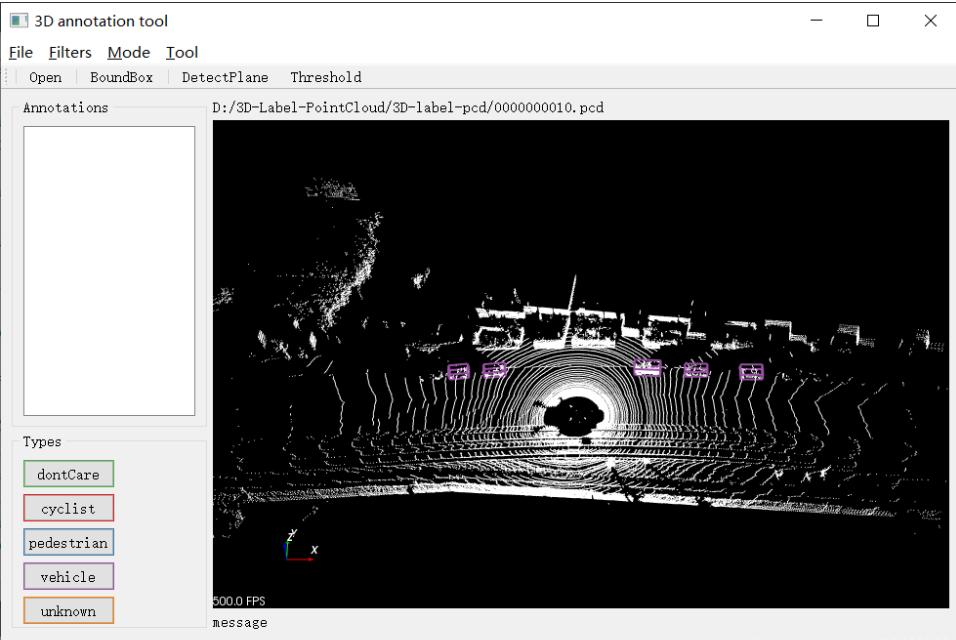
为了标注点云数据,根据使用要求和方便程度最终选择了这款可以在Windows下编译安装的point-cloud-annotation-tool,基于QT和vtk和PCL进行编译。其主要可以支持以下几种标注格式
- 支持点云数据加载、保存与可视化
- 支持点云数据选择
- 支持3D BOX框生成
- 支持KITTI-bin格式数据
下面这篇文章讲了在Windows下具体的使用与安装方法,而对于Ubuntu的用户来说,可以参考这个文章
3. SUSTechPoints
在得到图像数据,激光雷达数据,标定数据之后,需要进行3D目标框标注。本文采用的标注工具采用的是:SUSTechPOINTS。这个工具是2020年IEEE收录的,是一个比较好的开源项目,可以使得激光雷达和图像数据联合标注。其主要可以完成点云渲染, 3视图, 2D 相机图, 交互较流畅,半自动框注释(需要额外的包)自动对象跟踪 ID 生成,具体的安装使用可以看这篇文章

4. annotate
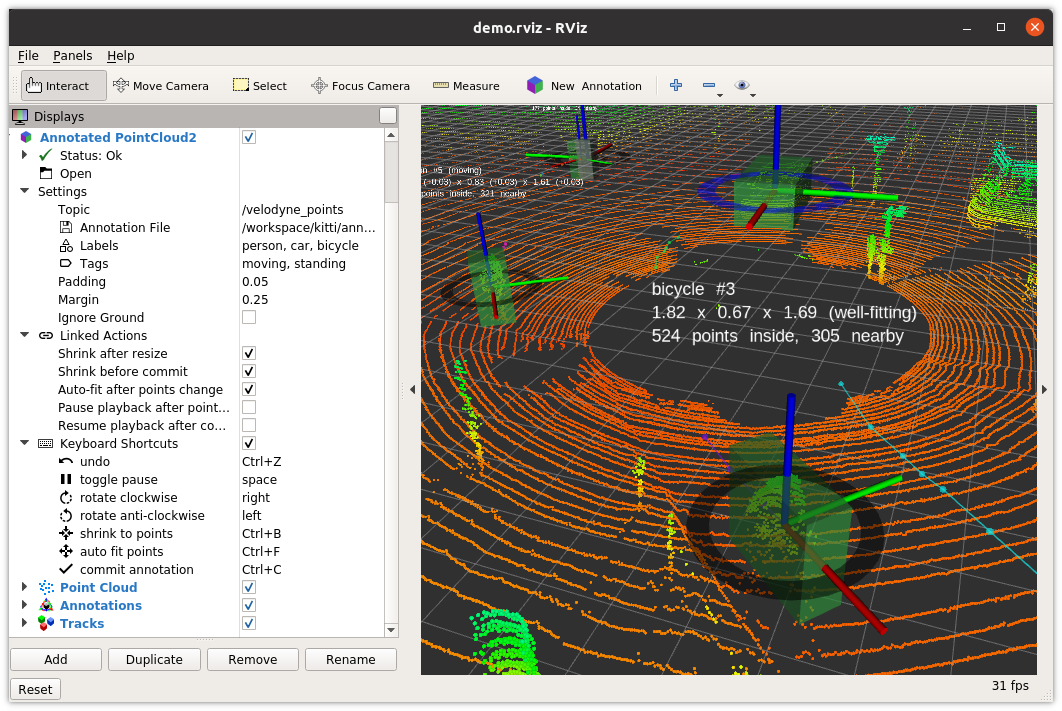
感知算法的评估需要标记的地面真实数据。受监督的机器学习算法需要标记的训练数据。“annotate”是在ROS/RViz中创建三维标记边界框的工具。它的标记数据既可以作为机器学习算法的训练数据,也可以作为评估的基础数据。具体的使用可以参考这篇文章
5. Label家族
5.1 Labelhub
Labelhub作为一个支持网页端标注的标注软件。其支持所有类型的图片标注,支持2D图像(.jpg和.png文件)的3视图映射。还支持LIDAR生成的3D点云(.pcd文件)中目标的标注,支持3D BOX框生成。最好用的还是其可以通过预置训练模型可进行目标自动识别,贴边等。免费体验地址如下http://labelhub.cn/。如果需要具体使用这个软件,可以参考这个博客

5.2 labelImg-kitti(bev)
使用该软件可以直接提供bev视角的标注,得到kitti格式,这个就是在传统的IabelImg上进行了扩充,增加了bev视角下深度点云的标注,具体使用可以参考这篇文章
