1. yolov4网络整体结构
yolov4的网络组成模块:
Backbone: CSPDarknet53
Neck: SPP, PAN
Head: YOLOv3
下图是yolov4的整体结构:

2. CSPDarknet53主网络架构
CSPDarknet53网络是在Darknet53的基础上加入CSP。我们先了解一下CSPNet网络,CSP全称Cross Stage Partial,它可以增强CNN的学习能力,能够在轻量化、低计算量和低内存访问成本下有效提高准确率。(论文:https://arxiv.org/pdf/1911.11929.pdf)
下图是CSPNet加到ResNet(X)t中:

我们再看到Darknet53网络,结构如下图所示:

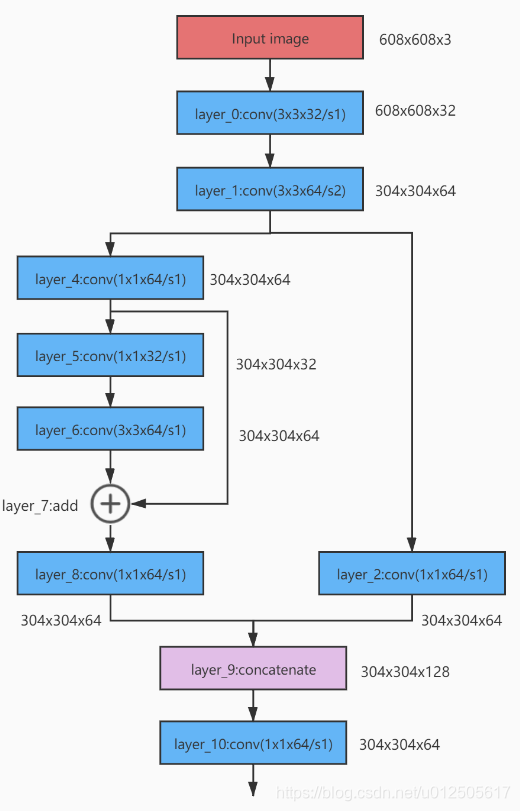

在网络CSPResNe(x)t残差块的前面使用了kernel=3x3, stride=2的卷积进行下采用,特征图的尺寸W, H都会减半。在残差块之后会使用concat把通道进行拼接。
代码如下:
import torch
import torch.nn.functional as F
import torch.nn as nn
import math
from collections import OrderedDict
#-------------------------------------------------#
# MISH激活函数
#-------------------------------------------------#
class Mish(nn.Module):
def __init__(self):
super(Mish, self).__init__()
def forward(self, x):
return x * torch.tanh(F.softplus(x))
#-------------------------------------------------#
# 卷积块
# CONV+BATCHNORM+MISH
#-------------------------------------------------#
class BasicConv(nn.Module):
def __init__(self, in_channels, out_channels, kernel_size, stride=1):
super(BasicConv, self).__init__()
self.conv = nn.Conv2d(in_channels, out_channels, kernel_size, stride, kernel_size//2, bias=False)
self.bn = nn.BatchNorm2d(out_channels)
self.activation = Mish()
def forward(self, x):
x = self.conv(x)
x = self.bn(x)
x = self.activation(x)
return x
#---------------------------------------------------#
# CSPdarknet的结构块的组成部分
# 内部堆叠的残差块
#---------------------------------------------------#
class Resblock(nn.Module):
def __init__(self, channels, hidden_channels=None, residual_activation=nn.Identity()):
super(Resblock, self).__init__()
if hidden_channels is None:
hidden_channels = channels
self.block = nn.Sequential(
BasicConv(channels, hidden_channels, 1),
BasicConv(hidden_channels, channels, 3)
)
def forward(self, x):
return x+self.block(x)
#---------------------------------------------------#
# CSPdarknet的结构块
# 存在一个大残差边
# 这个大残差边绕过了很多的残差结构
#---------------------------------------------------#
class Resblock_body(nn.Module):
def __init__(self, in_channels, out_channels, num_blocks, first):
super(Resblock_body, self).__init__()
self.downsample_conv = BasicConv(in_channels, out_channels, 3, stride=2)
if first:
self.split_conv0 = BasicConv(out_channels, out_channels, 1)
self.split_conv1 = BasicConv(out_channels, out_channels, 1)
self.blocks_conv = nn.Sequential(
Resblock(channels=out_channels, hidden_channels=out_channels//2),
BasicConv(out_channels, out_channels, 1)
)
self.concat_conv = BasicConv(out_channels*2, out_channels, 1)
else:
self.split_conv0 = BasicConv(out_channels, out_channels//2, 1)
self.split_conv1 = BasicConv(out_channels, out_channels//2, 1)
self.blocks_conv = nn.Sequential(
*[Resblock(out_channels//2) for _ in range(num_blocks)],
BasicConv(out_channels//2, out_channels//2, 1)
)
self.concat_conv = BasicConv(out_channels, out_channels, 1)
def forward(self, x):
x = self.downsample_conv(x)
x0 = self.split_conv0(x)
x1 = self.split_conv1(x)
x1 = self.blocks_conv(x1)
x = torch.cat([x1, x0], dim=1)
x = self.concat_conv(x)
return x
class CSPDarkNet(nn.Module):
def __init__(self, layers):
super(CSPDarkNet, self).__init__()
self.inplanes = 32
self.conv1 = BasicConv(3, self.inplanes, kernel_size=3, stride=1)
self.feature_channels = [64, 128, 256, 512, 1024]
self.stages = nn.ModuleList([
Resblock_body(self.inplanes, self.feature_channels[0], layers[0], first=True),
Resblock_body(self.feature_channels[0], self.feature_channels[1], layers[1], first=False),
Resblock_body(self.feature_channels[1], self.feature_channels[2], layers[2], first=False),
Resblock_body(self.feature_channels[2], self.feature_channels[3], layers[3], first=False),
Resblock_body(self.feature_channels[3], self.feature_channels[4], layers[4], first=False)
])
self.num_features = 1
# 进行权值初始化
for m in self.modules():
if isinstance(m, nn.Conv2d):
n = m.kernel_size[0] * m.kernel_size[1] * m.out_channels
m.weight.data.normal_(0, math.sqrt(2. / n))
elif isinstance(m, nn.BatchNorm2d):
m.weight.data.fill_(1)
m.bias.data.zero_()
def forward(self, x):
x = self.conv1(x)
x = self.stages[0](x)
x = self.stages[1](x)
out3 = self.stages[2](x)
out4 = self.stages[3](out3)
out5 = self.stages[4](out4)
return out3, out4, out5
def darknet53(pretrained, **kwargs):
model = CSPDarkNet([1, 2, 8, 8, 4])
if pretrained:
if isinstance(pretrained, str):
model.load_state_dict(torch.load(pretrained))
else:
raise Exception("darknet request a pretrained path. got [{}]".format(pretrained))
return model
3. SPP, PAN模块
SPP全称SPATIAL Pyramid Pooling,空间金字塔池化,网络结构如下图所示:

SPP在YOLOv4中的作用是增加网络的感受野,网络中使用了3个不同尺度的池化 5x5, 9x9, 13x13,这样会得到更丰富的特征。经过池化后通过concat把三个池化层的输出进行通道拼接,拼接后经1x1 conv层进行特征降维。

#---------------------------------------------------#
# SPP结构,利用不同大小的池化核进行池化
# 池化后堆叠
#---------------------------------------------------#
class SpatialPyramidPooling(nn.Module):
def __init__(self, pool_sizes=[5, 9, 13]):
super(SpatialPyramidPooling, self).__init__()
self.maxpools = nn.ModuleList([nn.MaxPool2d(pool_size, 1, pool_size//2) for pool_size in pool_sizes])
def forward(self, x):
features = [maxpool(x) for maxpool in self.maxpools[::-1]]
features = torch.cat(features + [x], dim=1)
return features
PANet主要是为了解决目标检测中多尺度的问题,提升不同大小物体的检测能力,功能有点类似FPN。其结构和FPN相比,是在FPN的后面多加上了一层downsample操作,如图所示:

4. Head模块
特征图经过PANet输出之后会得到三个输出,这三个输出经过YOLOv3 head,YOLOv3 head是由两个conv层组成,其结构如下图所示。然后得到三个预测结果predict1, predict2, predict3,其中predict的维度为:w x h x 3*(4 + 1 + class_num),class_num代表类别数。

整个框架的代码:
#---------------------------------------------------#
# 最后获得yolov4的输出
#---------------------------------------------------#
def yolo_head(filters_list, in_filters):
m = nn.Sequential(
conv2d(in_filters, filters_list[0], 3),
nn.Conv2d(filters_list[0], filters_list[1], 1),
)
return m
#---------------------------------------------------#
# yolo_body
#---------------------------------------------------#
class YoloBody(nn.Module):
def __init__(self, config):
super(YoloBody, self).__init__()
self.config = config
# backbone
self.backbone = darknet53(None)
self.conv1 = make_three_conv([512,1024],1024)
self.SPP = SpatialPyramidPooling()
self.conv2 = make_three_conv([512,1024],2048)
self.upsample1 = Upsample(512,256)
self.conv_for_P4 = conv2d(512,256,1)
self.make_five_conv1 = make_five_conv([256, 512],512)
self.upsample2 = Upsample(256,128)
self.conv_for_P3 = conv2d(256,128,1)
self.make_five_conv2 = make_five_conv([128, 256],256)
# 3*(5+num_classes)=3*(5+20)=3*(4+1+20)=75
final_out_filter2 = len(config["yolo"]["anchors"][2]) * (5 + config["yolo"]["classes"])
self.yolo_head3 = yolo_head([256, final_out_filter2],128)
self.down_sample1 = conv2d(128,256,3,stride=2)
self.make_five_conv3 = make_five_conv([256, 512],512)
# 3*(5+num_classes)=3*(5+20)=3*(4+1+20)=75
final_out_filter1 = len(config["yolo"]["anchors"][1]) * (5 + config["yolo"]["classes"])
self.yolo_head2 = yolo_head([512, final_out_filter1],256)
self.down_sample2 = conv2d(256,512,3,stride=2)
self.make_five_conv4 = make_five_conv([512, 1024],1024)
# 3*(5+num_classes)=3*(5+20)=3*(4+1+20)=75
final_out_filter0 = len(config["yolo"]["anchors"][0]) * (5 + config["yolo"]["classes"])
self.yolo_head1 = yolo_head([1024, final_out_filter0],512)
def forward(self, x):
# backbone
x2, x1, x0 = self.backbone(x)
P5 = self.conv1(x0)
P5 = self.SPP(P5)
P5 = self.conv2(P5)
P5_upsample = self.upsample1(P5)
P4 = self.conv_for_P4(x1)
P4 = torch.cat([P4,P5_upsample],axis=1)
P4 = self.make_five_conv1(P4)
P4_upsample = self.upsample2(P4)
P3 = self.conv_for_P3(x2)
P3 = torch.cat([P3,P4_upsample],axis=1)
P3 = self.make_five_conv2(P3)
P3_downsample = self.down_sample1(P3)
P4 = torch.cat([P3_downsample,P4],axis=1)
P4 = self.make_five_conv3(P4)
P4_downsample = self.down_sample2(P4)
P5 = torch.cat([P4_downsample,P5],axis=1)
P5 = self.make_five_conv4(P5)
out2 = self.yolo_head3(P3)
out1 = self.yolo_head2(P4)
out0 = self.yolo_head1(P5)
return out0, out1, out2