1. 基础函数
1.1 读取数据和绘图
将读取数据/绘图等库安装好:
using Gadfly
using LinearAlgebra
using TravelingSalesmanHeuristics
using TSPLIB
tsp = readTSPLIB(:a280)
n = tsp.dimension
plot_instance(tsp) = plot(x = tsp.nodes[:,1], y = tsp.nodes[:,2], Geom.point, Guide.xlabel(nothing), Guide.ylabel(nothing))
function plot_solution(tsp, path, extras = [])
ptspath = tsp.nodes[path,:]
plot(x = ptspath[:,1], y = ptspath[:,2], Geom.point, Geom.path, Guide.xlabel(nothing), Guide.ylabel(nothing), extras...)
end
distmat = [norm(tsp.nodes[i,:] - tsp.nodes[j,:]) for i in 1:n, j in 1:n]
还有一个是树的绘制,代码如下:
for i in 1:length(mst)
l = tsp.nodes[collect(mst[i]),:]
PyPlot.plot(l[:,1], l[:,2], color="r",linewidth = 0.5, linestyle="--")
end
1.2 求解调用
第一种调用方法是使用quality_factor:
@time path, cost = solve_tsp(distmat; quality_factor = 85)
第二种是指定构造型启发式算法:
path_nn, cost_nn = nearest_neighbor(distmat; firstcity = 1, do2opt = false)
path_nn2opt, cost_nn2opt = nearest_neighbor(distmat; firstcity = 1, do2opt = true)
path_fi, cost_fi = farthest_insertion(distmat; firstcity = 1, do2opt = false)
path_fi2opt, cost_fi2opt = farthest_insertion(distmat; firstcity = 1, do2opt = true)
第三种是指定改进型启发式算法:
path_sa, cost_sa = simulated_annealing(distmat; init_path = path_nn, num_starts = 10)
2. 获取下界
可以调用方法如下:
TravelingSalesmanHeuristics.vertwise_bound(distmat)
TravelingSalesmanHeuristics.hkinspired_bound(distmat)
2.1 vertwise下界
第一种下界非常简单,每个点取最短的两条边加起来即可。
# the cost of a tour must be >= the sum over all vertices of
# the cost of the cheapest edge leaving that vertex
# likewise for the cheapest edge entering that vertex
# since we must go to and leave each vertex
function vertwise_bound(distmat::AbstractMatrix{T}) where {T<:Real}
# the simple code below would tend to pick out the 0 costs on the diagonal
# so make a doctored copy of the distance matrix with high costs on the diagonal
m = maximum(distmat)
distmat_nodiag = distmat + m * I
leaving = sum(minimum(distmat_nodiag, dims = 2))
entering = sum(minimum(distmat_nodiag, dims = 1))
return maximum([leaving, entering])
end
2.2 1-tree下界
这里要用到最小生成树:
# 最小生成树
# returns a (n-1) long Vector of Tuple{Int, Int} where each tuple is an edge in the MST
# and the total weight of the tree
# the matrix passed in must be symmetric or you won't get out the minimum spanning tree
function minspantree(dm::AbstractMatrix{T}) where {T<:Real} # accepts views
mst_edges = Vector{Tuple{Int, Int}}()
mst_cost = zero(T)
n = size(dm, 1)
# we keep a running list of the distance from each vertex to the partly formed tree
# rather than using 0 for vertices already in the tree, we use a large value so that we
# can find the closest non-tree vertex via call to Julia's `findmin`.
bigval = maximum(dm) + one(T)
tree_dists = dm[1,:] # distance to tree
closest_tree_verts = ones(Int, n)
tree_dists[1] = bigval # vert 1 is in tree now
for _ in 1:(n-1) # need to add n - 1 other verts to tree
cost, newvert = findmin(tree_dists)
treevert = closest_tree_verts[newvert]
# add costs and edges
mst_cost += cost
if treevert < newvert
push!(mst_edges, (treevert, newvert))
else
push!(mst_edges, (newvert, treevert))
end
# update distances to tree
tree_dists[newvert] = bigval
for i in 1:n
c = tree_dists[i]
if c >= bigval # already in tree
continue
end
# maybe this vertex is closer to the new vertex than the prior iteration's tree
if c > dm[i, newvert]
tree_dists[i] = dm[i, newvert]
closest_tree_verts[i] = newvert
end
end
end
return mst_edges, mst_cost
end
调用示例如下:
1-tree的流程如下:
1. 在V中选一个节点v0
2. 设r为(V-{V0},d)最小生成树的长度
3. 设s为以v0为顶点的最短的两条边的和,即s=min{d(v0,x)+d(v0,y):x,y属于V-{v0},x不等于y}
4. 输出t:=r+s
我们可以将完整mst的所有叶子结点拿出来作为v0,取其中最小的t,代码如下:
function minimum_two(distmat::AbstractMatrix{T}) where {T<:Real}
n = size(distmat)[1]
s = zeros(n)
max_num = typemax(Int32)
for j in 1:n
arr = view(distmat,j,[1:j-1;j+1:n])
m1=max_num
m2=max_num
for i in 1:n-1
if arr[i]<m1
m2=m1
m1=arr[i]
elseif arr[i]<m2
m2=arr[i]
end
end
s[j] = m1+m2
end
return s
end
function hkinspired_bound_2(distmat::AbstractMatrix{T}) where {T<:Real}
mst, c = minspantree(distmat)
roots = Dict()
for m in mst
roots[m[1]] = m[2]
roots[m[2]] = m[1]
end
x = counter(cat([m[1] for m in mst],[m[2] for m in mst],dims=1))
leaves = []
for xi in x
if xi[2]==1
append!(leaves,xi[1])
end
end
maxcost = 0
min2 = minimum_two(distmat)
for i in leaves
cost = c - distmat[i,roots[i]] + min2[i] #+ 2*minimum(distmat_nodiag[i,:])
if cost > maxcost
maxcost = cost
end
end
return maxcost
end
另一种方式是将所有的点拿出来做v0,重新计算mst,速度会慢不少,代码如下
# a simplified/looser version of Held-Karp bounds
# any tour is a spanning tree on (n-1) verts plus two edges from the left out vert
# so the maximum over all verts (as the left out vert) of
# MST cost on remaining vertices plus 2 cheapest edges from
# the left out vert is a lower bound
# for extra simplicity, the distance matrix is modified to be symmetric so we can treat
# the underlying graph as undirected. This also doesn't help the bound!
function hkinspired_bound(distmat::AbstractMatrix{T}) where {T<:Real}
n = size(distmat, 1)
# get a view of the distmat with one vertex deleted
function del_vert(v)
keep = [1:(v-1) ; (v+1):n]
return view(distmat, keep, keep)
end
# make sure min(distmat[v,:]) doesn't pick diagonal elements
m = maximum(distmat)
distmat_nodiag = distmat + m * I
# lower bound the optimal cost by leaving a single vertex out
# forming spanning tree on the rest
# connecting the left-out vertex
function cost_leave_out(v)
dmprime = del_vert(v)
_, c = minspantree(dmprime)
c += 2*minimum(distmat_nodiag[v,:])
return c
end
return maximum(map(cost_leave_out, 1:n))
end
2.3 Held-Karp下界
Held-Karp法在LKH算法中也用到了,核心如下图:
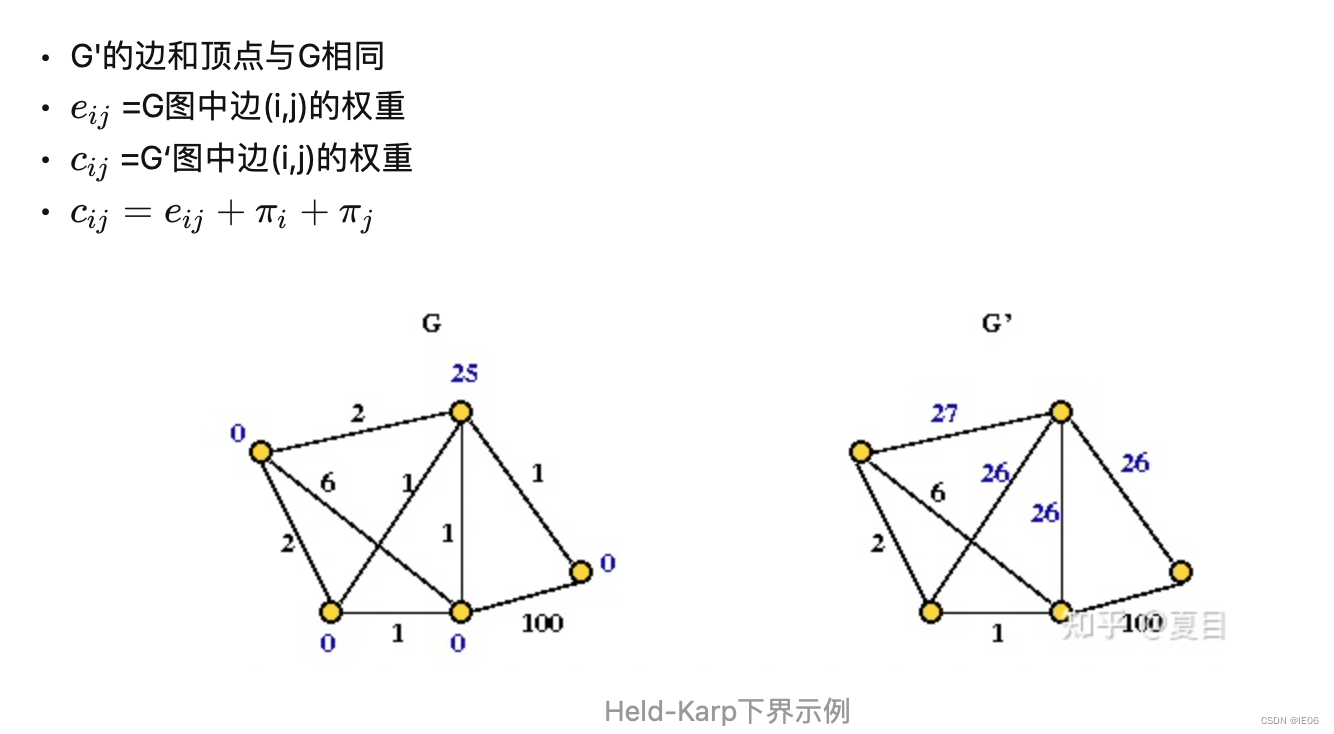
我们可以用类似训练深度学习的方法,来逐步调节所有的 π \pi π,直到收敛。
3. 模拟退火
使用简单的2-opt算子进行优化,以一定的概率接受退化解。源代码如下:
"""
The temperature decays exponentially from `init_temp` to `final_temp`,接受退化解的概率
"""
function simulated_annealing(distmat::Matrix{T} where {T<:Real};
steps = 50*length(distmat),
num_starts = 1,
init_temp = exp(8), final_temp = exp(-6.5),
init_path::Union{Vector{Int}, Nothing} = nothing)
# cooling rate: we multiply by a constant mult each step
cool_rate = (final_temp / init_temp)^(1 / (steps - 1))
# do SA with a single starting path,将一部分路径反转
function sahelper!(path)
temp = init_temp / cool_rate # divide by cool_rate so when we first multiply we get init_temp
n = size(distmat, 1)
for i in 1:steps
temp *= cool_rate
first, last = rand(2:n), rand(2:n)
if first > last
first, last = last, first
end
cost_delta = pathcost_rev_delta(distmat, path, first, last)
@fastmath accept = cost_delta < 0 ? true : rand() < exp(-cost_delta / temp)
# should we accept?
if accept
reverse!(path, first, last)
end
end
return path, pathcost(distmat, path)
end
# unpack the initial path
if init_path == nothing
randstart = true
path = randpath(n)
else
if !legal_circuit(init_path)
error("The init_path passed to simulated_annealing must be a legal circuit.")
end
randstart = false
path = init_path
end
cost = pathcost(distmat, path)
# 核心流程
for _ in 1:num_starts
path_this_start = randstart ? randpath(n) : deepcopy(init_path)
otherpath, othercost = sahelper!(path_this_start)
if othercost < cost
cost = othercost
path = otherpath
end
end
return path, cost
end
function randpath(n)
path = 1:n |> collect |> shuffle
push!(path, path[1]) # loop
return path
end