一、ESP32-C3 Arduino开发环境的搭建
ESP32-C3 Arduino IDE开发环境的搭载(离线) – Jason的博客 (jason1016.club)
二、I2C协议
协议总览(持续更新) – Jason的博客 (jason1016.club)
三、上传环境

直接搜索 adafruit mpu6050 安装对应的MPU6050库

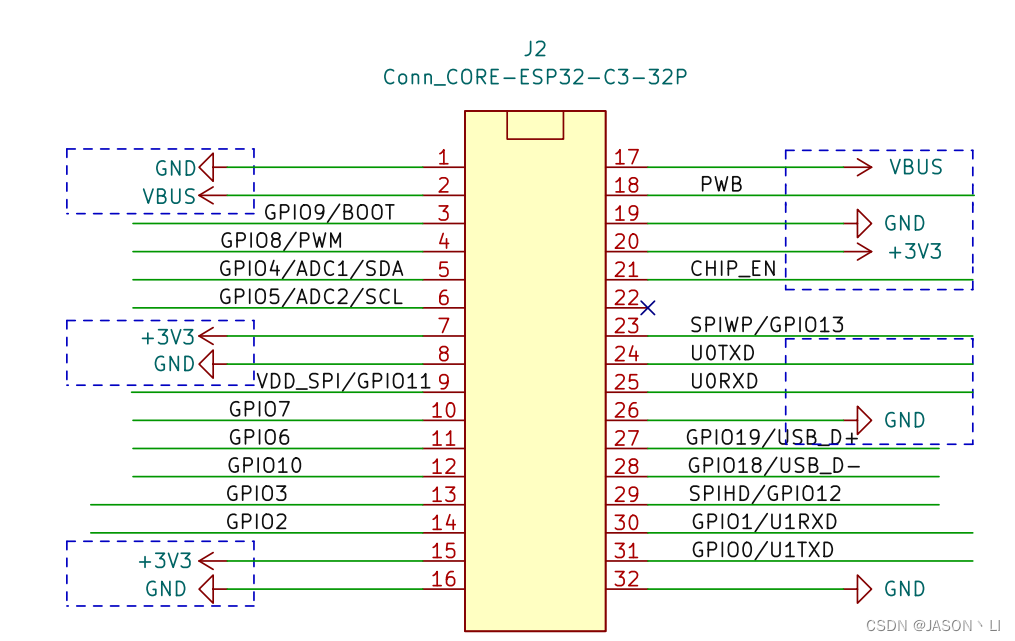
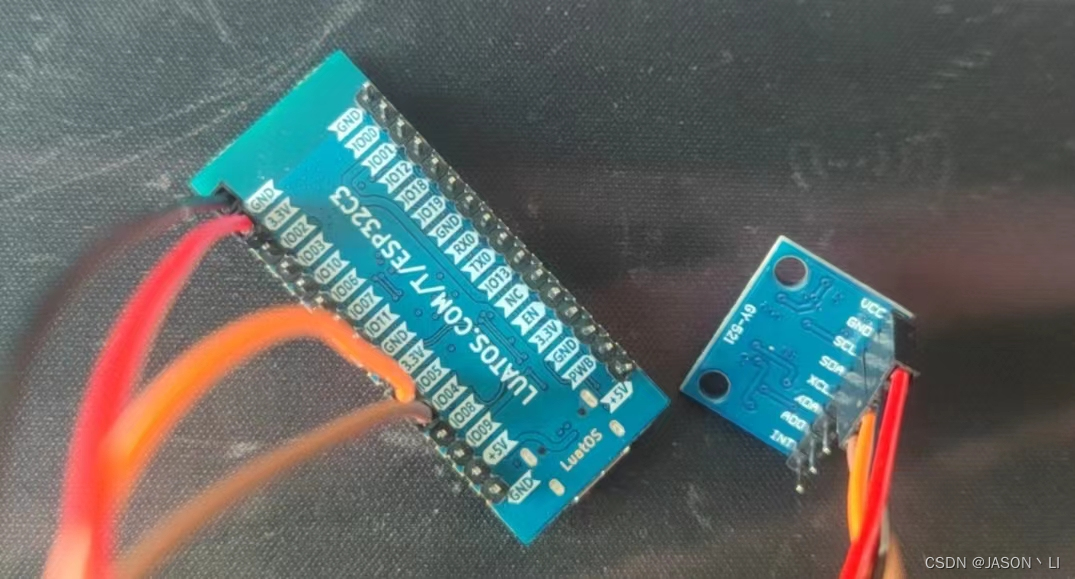
四、接线
| 合宙ESP32C3 | MPU6500 |
| VCC(3.3V) | VCC |
| GND | GND |
| SDA(GPIO4) | SDA |
| SCL(GPIO5) | SCL |
五、代码
#include <Wire.h>
#include <Adafruit_MPU6050.h>
#include <Adafruit_Sensor.h>
Adafruit_MPU6050 mpu;
void setup(void) {
Serial.begin(115200);
Wire.begin(4,5);
while (!Serial)
delay(10); //初始化MPU-6050传感器。
Serial.println("Adafruit MPU6050 test!");
// 尝试初始化
if (!mpu.begin()) {
Serial.println("not find MPU6050");
while (1) {
delay(10);
}
}
Serial.println("MPU6050 Found!");
mpu.setAccelerometerRange(MPU6050_RANGE_8_G);
Serial.print("加速计范围设置为: ");
switch (mpu.getAccelerometerRange()) {
case MPU6050_RANGE_2_G:
Serial.println("+-2G");
break;
case MPU6050_RANGE_4_G:
Serial.println("+-4G");
break;
case MPU6050_RANGE_8_G:
Serial.println("+-8G");
break;
case MPU6050_RANGE_16_G:
Serial.println("+-16G");
break;
}
mpu.setGyroRange(MPU6050_RANGE_500_DEG);
Serial.print("陀螺仪量程设置为: ");
switch (mpu.getGyroRange()) {
case MPU6050_RANGE_250_DEG:
Serial.println("+- 250 deg/s");
break;
case MPU6050_RANGE_500_DEG:
Serial.println("+- 500 deg/s");
break;
case MPU6050_RANGE_1000_DEG:
Serial.println("+- 1000 deg/s");
break;
case MPU6050_RANGE_2000_DEG:
Serial.println("+- 2000 deg/s");
break;
}
mpu.setFilterBandwidth(MPU6050_BAND_5_HZ);
Serial.print("过滤器带宽设置为: ");
switch (mpu.getFilterBandwidth()) {
case MPU6050_BAND_260_HZ:
Serial.println("260 Hz");
break;
case MPU6050_BAND_184_HZ:
Serial.println("184 Hz");
break;
case MPU6050_BAND_94_HZ:
Serial.println("94 Hz");
break;
case MPU6050_BAND_44_HZ:
Serial.println("44 Hz");
break;
case MPU6050_BAND_21_HZ:
Serial.println("21 Hz");
break;
case MPU6050_BAND_10_HZ:
Serial.println("10 Hz");
break;
case MPU6050_BAND_5_HZ:
Serial.println("5 Hz");
break;
}
Serial.println("");
delay(100);
}
void loop() {
/* 通过读数获取新的传感器事件 */
sensors_event_t a, g, temp;
mpu.getEvent(&a, &g, &temp);
/* 打印出值 */
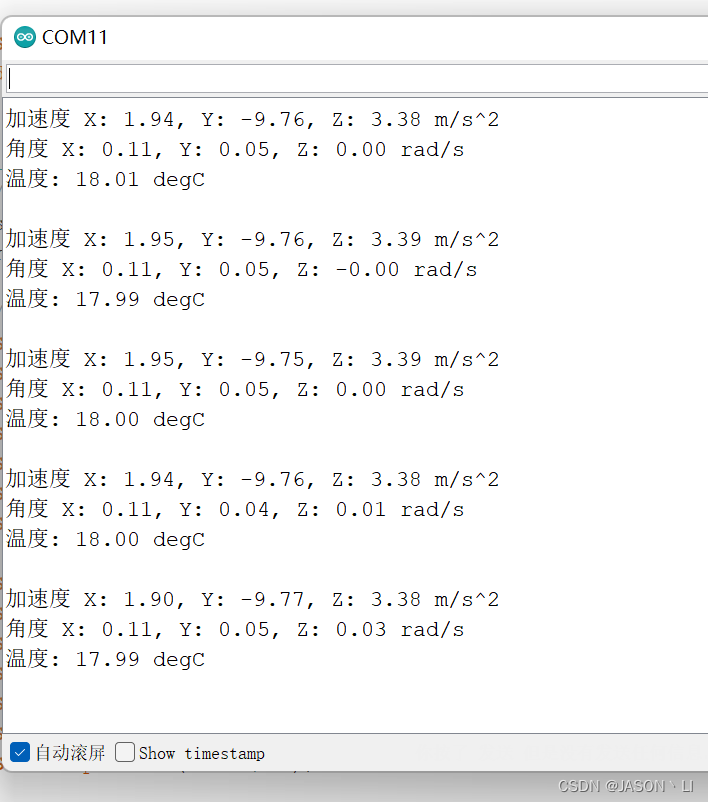
Serial.print("加速度 X: ");
Serial.print(a.acceleration.x);
Serial.print(", Y: ");
Serial.print(a.acceleration.y);
Serial.print(", Z: ");
Serial.print(a.acceleration.z);
Serial.println(" m/s^2");
Serial.print("角度 X: ");
Serial.print(g.gyro.x);
Serial.print(", Y: ");
Serial.print(g.gyro.y);
Serial.print(", Z: ");
Serial.print(g.gyro.z);
Serial.println(" rad/s");
Serial.print("温度: ");
Serial.print(temp.temperature);
Serial.println(" degC");
Serial.println("");
delay(500);
}六、测试
都看到这里,不妨点个赞、点个关注吧,作者致力于为大家奉献更好的作品!

本文为作者独立编写
本BLOG上所有的原创文章未经本人许可,不得用于商业用途及传统媒体。网络媒体转载请注明出处,否则属于侵权行为。