参考文章:
姿态角(Euler角):yaw pitch roll
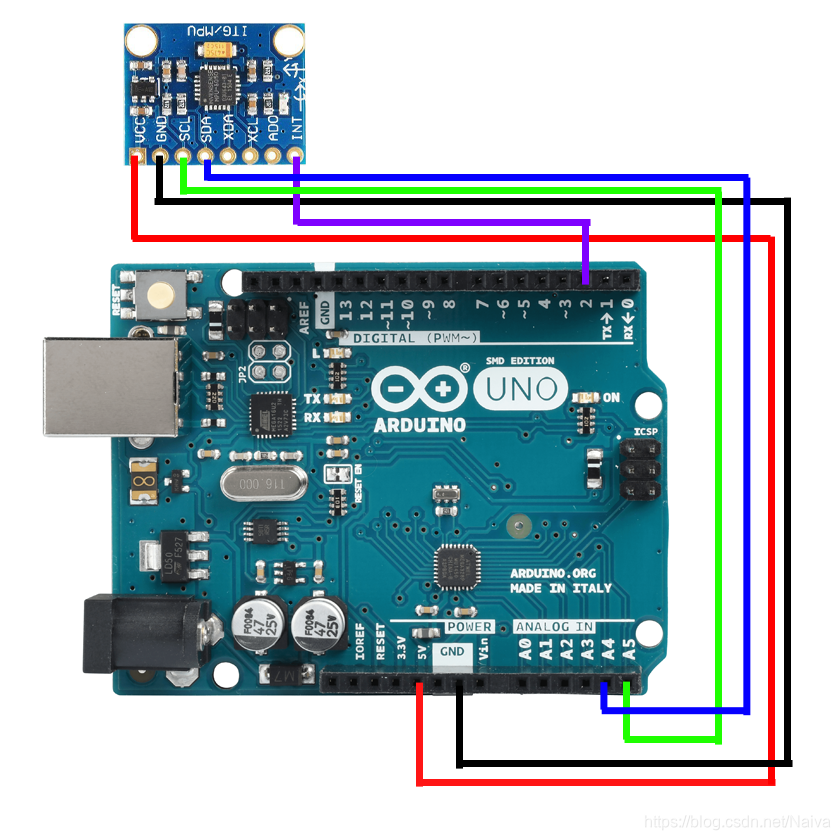
Arduino uno + mpu6050 陀螺仪 运用卡尔曼滤波姿态解算实验
MPU6050传感器数据处理
Micro:bit系列教程6:加速度传感器
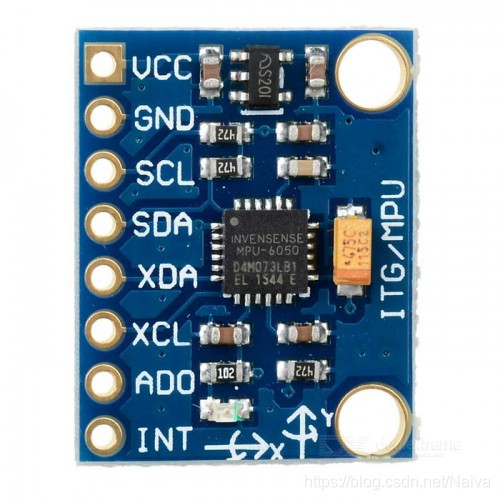
MPU6050陀螺仪

GY-61 ADXL335三轴加速度 MMA7260角度倾角传感器
三轴加速度传感器的引脚:
VCC
X_OUT (Z朝上,X控制左右角度)
Y_OUT(Z朝上,Y控制前后角度)
Z_OUT(Z朝上,Z控制上下角度)
GND
引脚定义:
const int X_OUT = A5; //X轴输出引脚定义
const int Y_OUT = A6; //Y轴输出引脚定义
const int Z_OUT = A7; //Z轴输出引脚定义
试例代码:
const int X_OUT = A5; //X轴输出引脚定义
const int Y_OUT = A6; //Y轴输出引脚定义
const int Z_OUT = A7; //Z轴输出引脚定义
float Xvalue = 0; //
float Yvalue = 0;
float Zvalue = 0;
void setup() {
Serial.begin(9600);
}
void loop() {
Xvalue = analogRead(X_OUT);
Yvalue = analogRead(Y_OUT);
Zvalue = analogRead(Z_OUT);
Serial.print("Xvalue = " );
Serial.print(Xvalue);
Serial.print(" Yvalue = " );
Serial.print(Yvalue);
Serial.print(" Zvalue = " );
Serial.println(Zvalue);
delay(20);
}
(20190514)
