1.软件版本
matlab2017b
2.本算法理论知识
设计了一种新的永磁同步电机双扩展卡尔曼滤波观测器.该观测器用于永磁同步电机无位置传感器 控制,可以实时估计永磁同步电机转子位置,转速和定子绕组电阻值.由于目前研究的扩展卡尔曼滤波器主要多用于电机转子位置和转速的估计,而且电机在长时问运行工作后,其电机参数,比如定子电阻和电感都将发生变化.尤其是定子电阻的变化将会导致电机控制器算法性能降低,甚至导致常规的观测器算法失效.本文研究的双扩展卡尔曼滤波器包含着两个子扩展卡尔曼滤波器,它们分别作为状态滤波器和参数滤波器同时运行估计转子位置,转速和定子电阻.仿真结果表明,所设计的滤波器对于状态和参数估计具有较高的精确度,系统的动态响应速度快,稳态性能好.而且,该滤波器对外部扰动,电机参数变化,观测器参数变化具有较强的鲁棒性.
这里使用的双卡尔曼的结构如下所示:
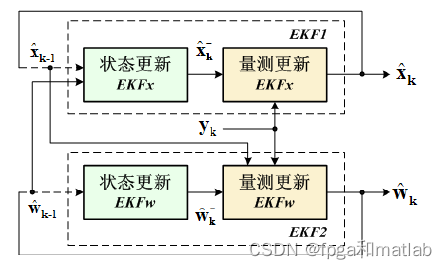
系统的方差如下:

我们需要通过双EKF计算xk和wk,其中xk