1.软件版本
matlab2013b
2.系统概述
整个系统的理论来自如下的论文:
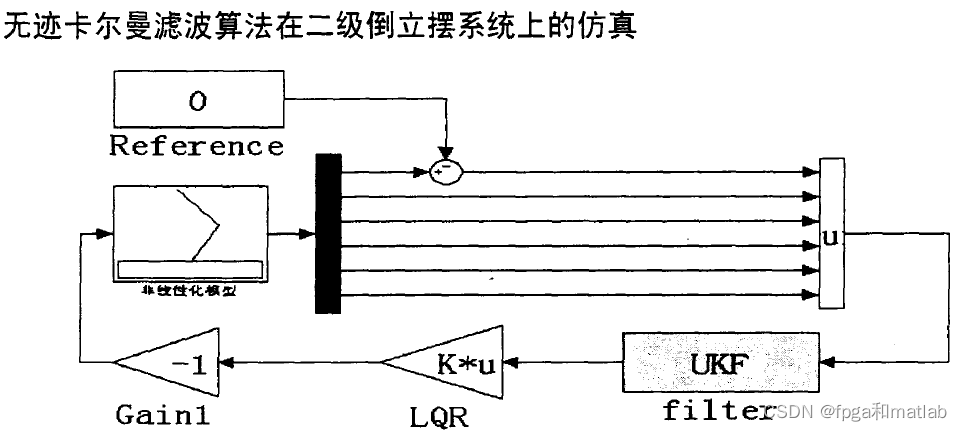
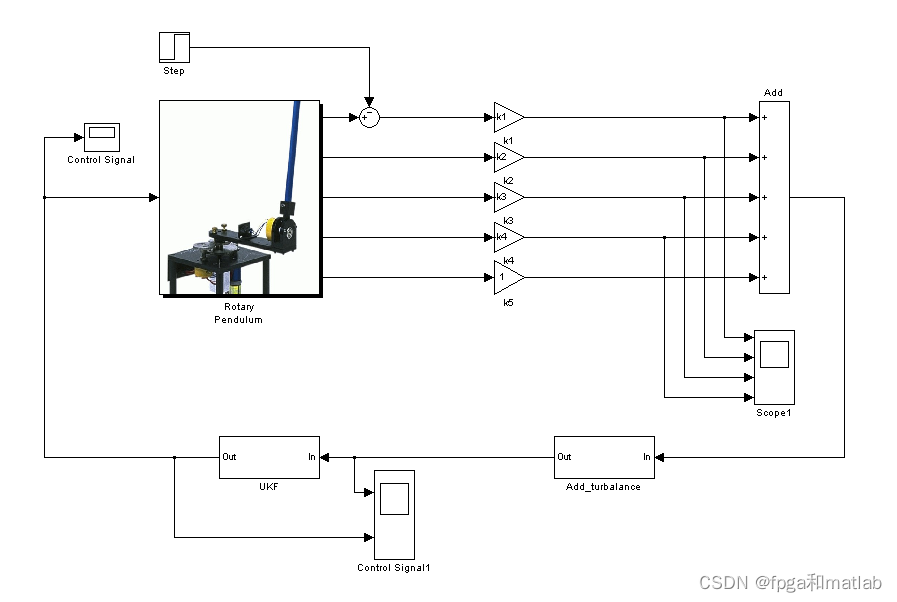
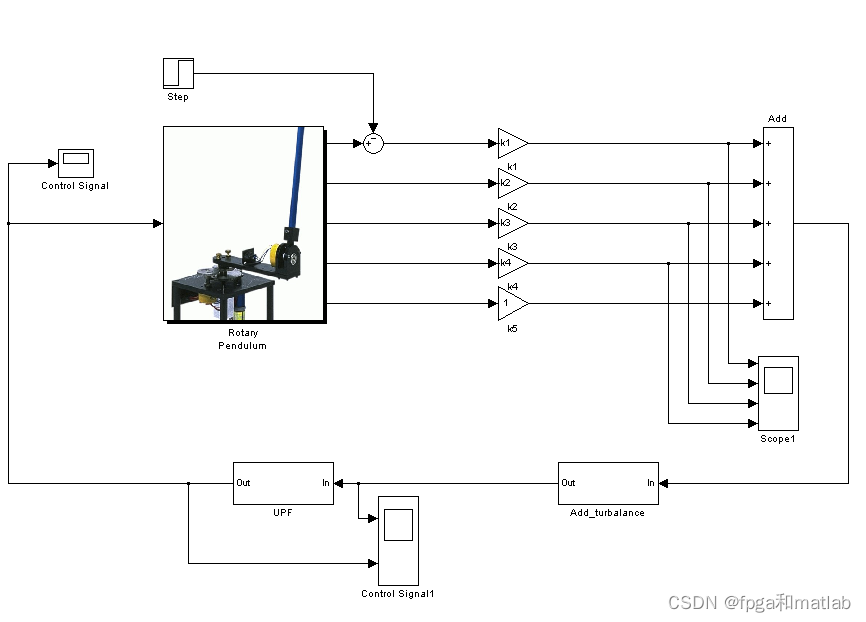
其中的设计结构为:
2.1 UKF
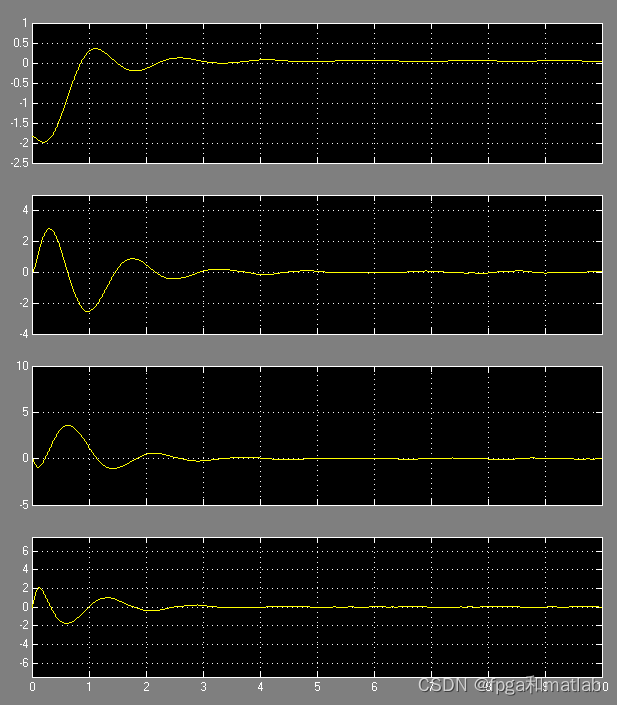
其仿真结果如下所示:
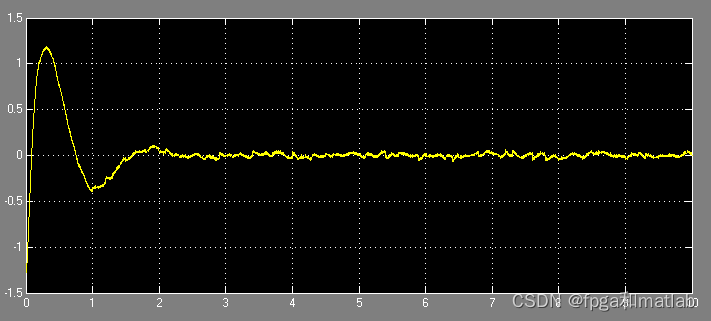
反馈控制信号:

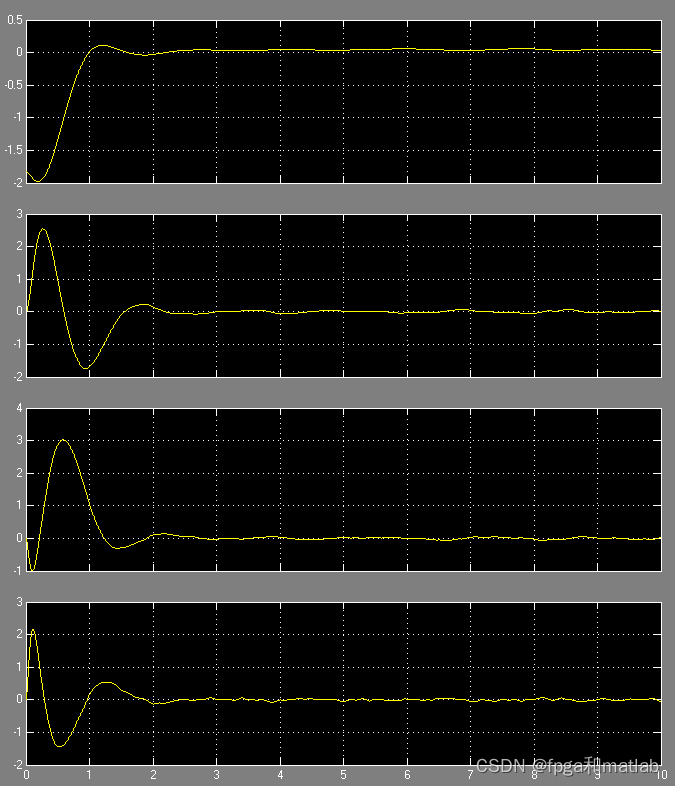
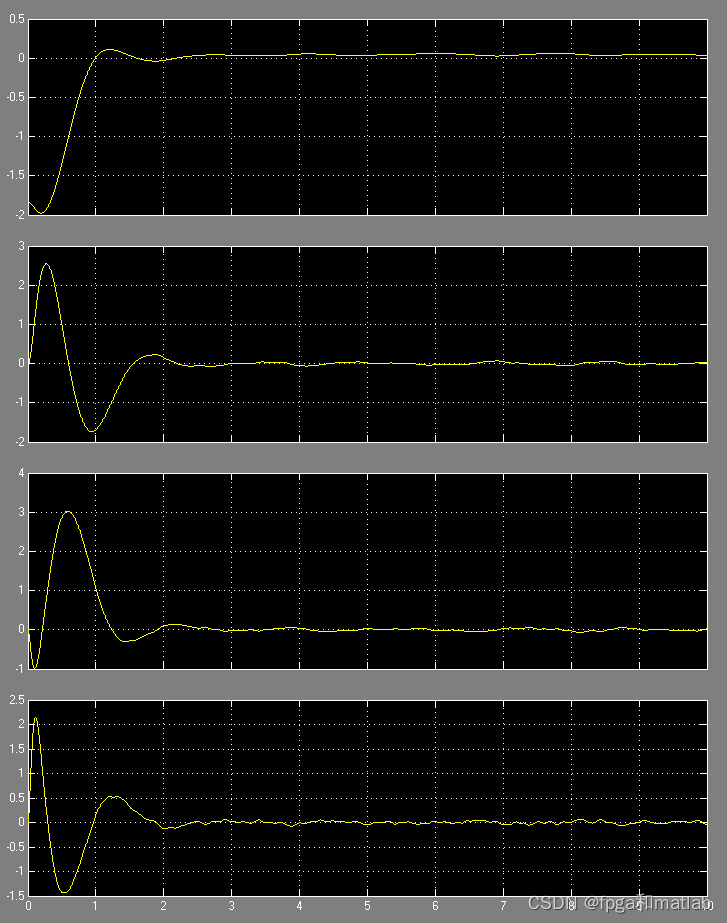
倒立摆四个参数信号:
扫描二维码关注公众号,回复:
14327944 查看本文章

2.2 PF

其仿真结果如下所示:
反馈控制信号:

倒立摆四个参数信号:
2.3 UPF
其仿真结果如下所示:
反馈控制信号:
倒立摆四个参数信号:
A08-13
matlab2013b
整个系统的理论来自如下的论文:
其中的设计结构为:
2.1 UKF
其仿真结果如下所示:
反馈控制信号:
倒立摆四个参数信号:
2.2 PF
其仿真结果如下所示:
反馈控制信号:
倒立摆四个参数信号:
2.3 UPF
其仿真结果如下所示:
反馈控制信号:
倒立摆四个参数信号:
A08-13