版权声明:本文为博主原创文章,未经博主允许不得转载。 https://blog.csdn.net/dahaiya/article/details/85059828
代码1
clear;
clc;
n_iter = 100;
t = 1:n_iter;
sz = [n_iter,1];
x = 24;
Q = 4e-4;
R = 0.25;
T_start = 23.5;
delta_start = 1;
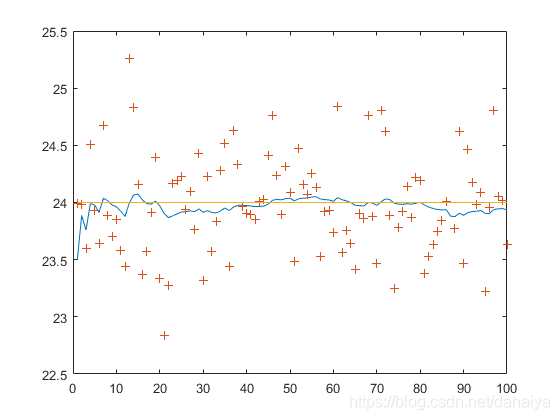
z = x + sqrt(R)*randn(sz); %100次的测量结果
state_kalman = zeros(sz);
variance_kalman = zeros(sz);
state_pre = zeros(sz);
variance_pre = zeros(sz);
K = zeros(sz);
state_kalman(1) = T_start;
variance_kalman(1) = delta_start;
for k = 2:n_iter
state_pre(k) = state_kalman(k-1);
variance_pre(k) = variance_kalman(k-1)+Q;
K(k) = variance_pre(k)/(variance_pre(k)+R);
state_kalman(k) = state_pre(k)+K(k)*(z(k)-state_pre(k));
variance_kalman(k) = (1-K(k))*variance_pre(k);
end
plot(t,state_kalman)
hold on
plot(t,z,'+')
hold on
plot([1,n_iter],[x,x])
axis([0 100 22.5 25.5])
代码2
clc
clear
close all
% 初始化参数
delta_t=0.1; %采样时间
t=0:delta_t:5;
N = length(t); % 序列的长度
sz = [2,N]; % 信号需开辟的内存空间大小 2行*N列 2:为状态向量的维数n
g=10; %加速度值
x=1/2*g*t.^2; %实际真实位置
z = x + sqrt(10).*randn(1,N); % 测量时加入测量白噪声
Q =[0 0;0 9e-1]; %假设建立的模型 噪声方差叠加在速度上 大小为n*n方阵 n=状态向量的维数
R = 10; % 位置测量方差估计,可以改变它来看不同效果 m*m m=z(i)的维数
A=[1 delta_t;0 1]; % n*n
B=[1/2*delta_t^2;delta_t];
H=[1,0]; % m*n
n=size(Q); %n为一个1*2的向量 Q为方阵
m=size(R);
% 分配空间
xhat=zeros(sz); % x的后验估计
P=zeros(n); % 后验方差估计 n*n
xhatminus=zeros(sz); % x的先验估计
Pminus=zeros(n); % n*n
K=zeros(n(1),m(1)); % Kalman增益 n*m
I=eye(n);
% 估计的初始值都为默认的0,即P=[0 0;0 0],xhat=0
for k = 9:N %假设车子已经运动9个delta_T了,我们才开始估计
% 时间更新过程
xhatminus(:,k) = A*xhat(:,k-1)+B*g;
Pminus= A*P*A'+Q;
% 测量更新过程
K = Pminus*H'*inv( H*Pminus*H'+R );
xhat(:,k) = xhatminus(:,k)+K*(z(k)-H*xhatminus(:,k));
P = (I-K*H)*Pminus;
end
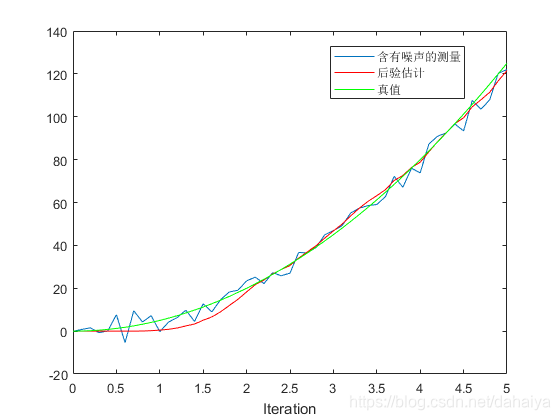
figure
plot(t,z);
hold on
plot(t,xhat(1,:),'r-')
plot(t,x(1,:),'g-');
legend('含有噪声的测量', '后验估计', '真值');
xlabel('Iteration');