什么是卡尔曼滤波?
对于这个滤波器,我们几乎可以下这么一个定论:只要是存在不确定信息的动态系统,卡尔曼滤波就可以对系统下一步要做什么做出有根据的推测。即便有噪声信息干扰,卡尔曼滤波通常也能很好的弄清楚究竟发生了什么,找出现象间不易察觉的相关性。
因此卡尔曼滤波非常适合不断变化的系统,它的优点还有内存占用较小(只需保留前一个状态)、速度快,是实时问题和嵌入式系统的理想选择。
如果你曾经Google过卡尔曼滤波的教程(如今有一点点改善),你会发现相关的算法教程非常可怕,而且也没具体说清楚是什么。事实上,卡尔曼滤波很简单,如果我们以正确的方式看它,理解是很水到渠成的事。
本文会用大量清晰、美观的图片和颜色来解释这个概念,读者只需具备概率论和矩阵的一般基础知识。
我们能用卡尔曼滤波做什么?
让我们举个例子:你造了一个可以在树林里四处溜达的小机器人,为了让它实现导航,机器人需要知道自己所处的位置。

也就是说,机器人有一个包含位置信息和速度信息的状态 :

注意,在这个例子中,状态是位置和速度,放进其他问题里,它也可以是水箱里的液体体积、汽车引擎温度、触摸板上指尖的位置,或者其他任何数据。
我们的小机器人装有GPS传感器,定位精度10米。虽然一般来说这点精度够用了,但我们希望它的定位误差能再小点,毕竟树林里到处都是土坑和陡坡,如果机器人稍稍偏了那么几米,它就有可能滚落山坡。所以GPS提供的信息还不够充分。

我们也可以预测机器人是怎么移动的:它会把指令发送给控制轮子的马达,如果这一刻它始终朝一个方向前进,没有遇到任何障碍物,那么下一刻它可能会继续坚持这个路线。但是机器人对自己的状态不是全知的:它可能会逆风行驶,轮子打滑,滚落颠簸地形……所以车轮转动次数并不能完全代表实际行驶距离,基于这个距离的预测也不完美。
这个问题下,GPS为我们提供了一些关于状态的信息,但那是间接的、不准确的;我们的预测提供了关于机器人轨迹的信息,但那也是间接的、不准确的。
但以上就是我们能够获得的全部信息,在它们的基础上,我们是否能给出一个完整预测,让它的准确度比机器人搜集的单次预测汇总更高?用了卡尔曼滤波,这个问题可以迎刃而解。
卡尔曼滤波眼里的机器人问题
还是上面这个问题,我们有一个状态,它和速度、位置有关:
我们不知道它们的实际值是多少,但掌握着一些速度和位置的可能组合,其中某些组合的可能性更高:
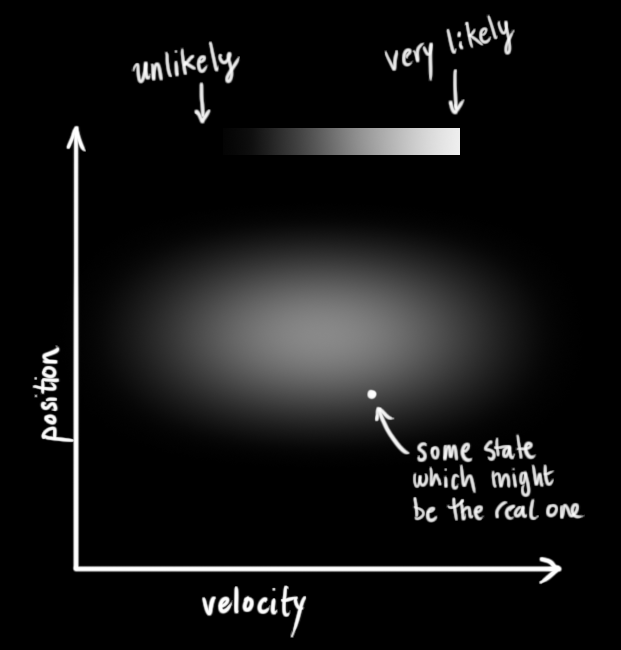
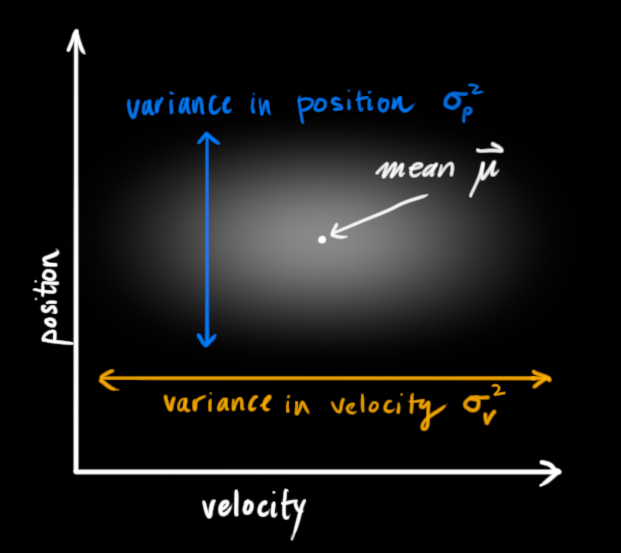
卡尔曼滤波假设两个变量(在我们的例子里是位置和速度)都应该是随机的,而且符合高斯分布。每个变量都有一个均值 ,它是随机分布的中心;有一个方差
,它衡量组合的不确定性。
在上图中,位置和速度是不相关的,这意味着我们不能从一个变量推测另一个变量。
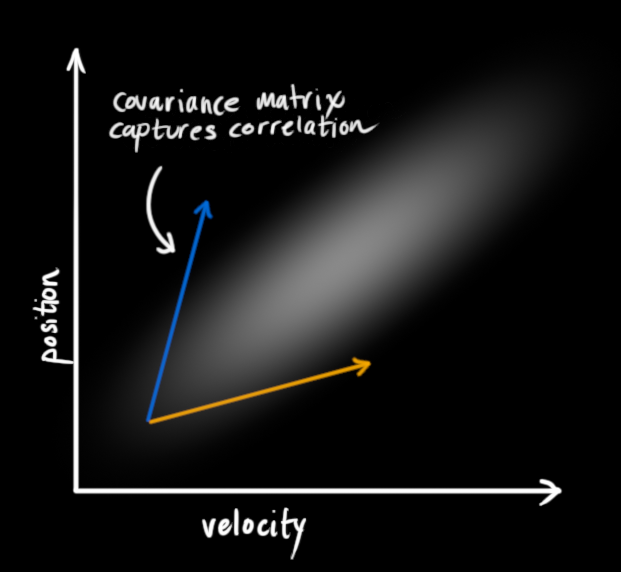
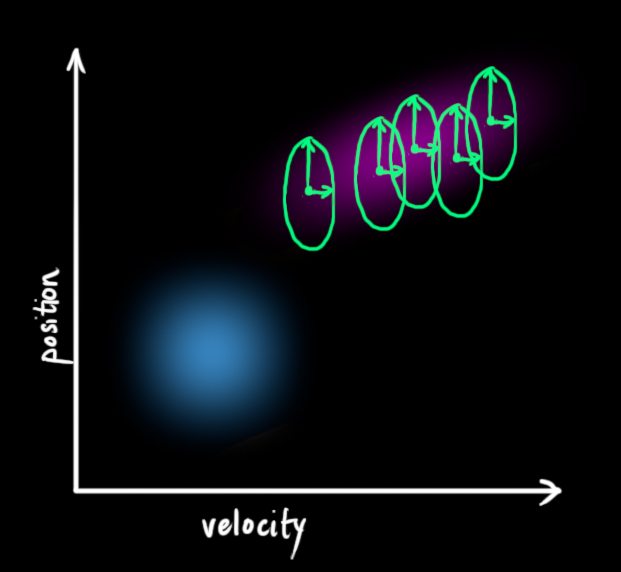
那么如果位置和速度相关呢?如下图所示,机器人前往特定位置的可能性取决于它拥有的速度。
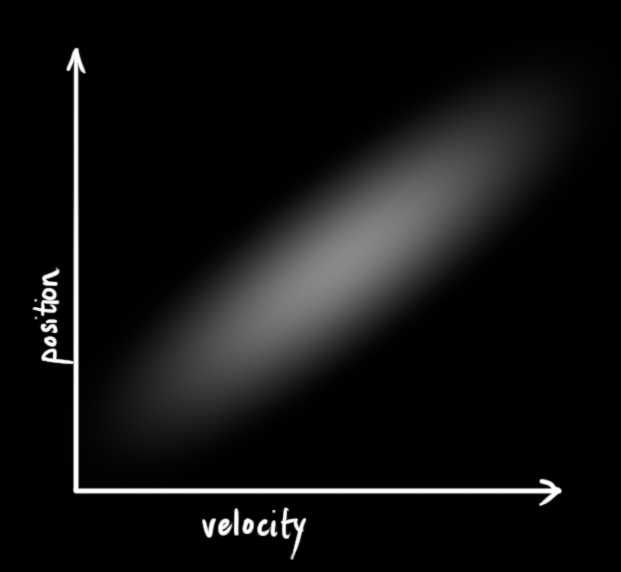
这不难理解,如果基于旧位置估计新位置,我们会产生这两个结论:如果速度很快,机器人可能移动得更远,所以得到的位置会更远;如果速度很慢,机器人就走不了那么远。
这种关系对目标跟踪来说非常重要,因为它提供了更多信息:一个可以衡量可能性的标准。这就是卡尔曼滤波的目标:从不确定信息中挤出尽可能多的信息!
为了捕获这种相关性,我们用的是协方差矩阵。简而言之,矩阵的每个值是第 个变量和第
个变量之间的相关程度(由于矩阵是对称的,
和
的位置可以随便交换)。我们用
表示协方差矩阵,在这个例子中,就是
。
用矩阵描述问题
为了把以上关于状态的信息建模为高斯分布(图中色块),我们还需要 时的两个信息:最佳估计
(均值,也就是
),协方差矩阵
。(虽然还是用了位置和速度两个变量,但只要和问题相关,卡尔曼滤波可以包含任意数量的变量)

接下来,我们要通过查看当前状态(k-1时)来预测下一个状态(k时)。这里我们查看的状态不是真值,但预测函数无视真假,可以给出新分布:

我们可以用矩阵 表示这个预测步骤:
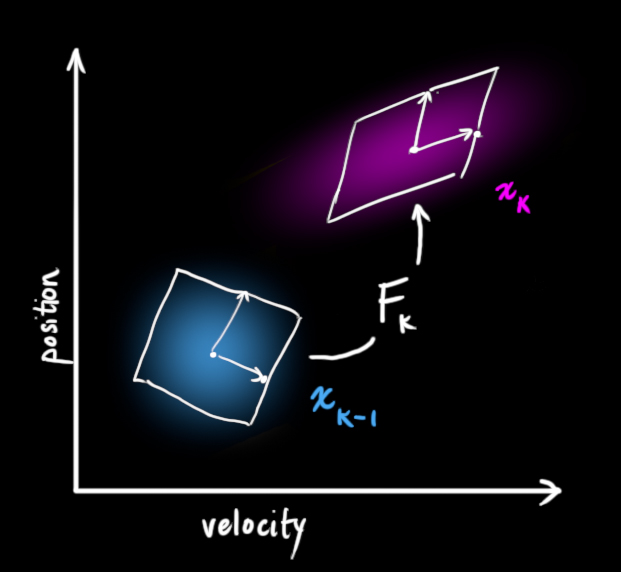
它从原始预测中取每一点,并将其移动到新的预测位置。如果原始预测是正确的,系统就会移动到新位置。
这是怎么做到的?为什么我们可以用矩阵来预测机器人下一刻的位置和速度?下面是个简单公式:

换成矩阵形式:

这是一个预测矩阵,它能给出机器人的下一个状态,但目前我们还不知道协方差矩阵的更新方法。这也是我们要引出下面这个等式的原因:如果我们将分布中的每个点乘以矩阵A,那么它的协方差矩阵会发生什么变化

把这个式子和上面的最佳估计 结合,可得:

外部影响
但是,除了速度和位置,外因也会对系统造成影响。比如模拟火车运动,除了列车自驾系统,列车操作员可能会手动调速。在我们的机器人示例中,导航软件也可以发出停止指令。对于这些信息,我们把它作为一个向量 ,纳入预测系统作为修正。
假设油门设置和控制命令是已知的,我们知道火车的预期加速度 。根据运动学基本定理,我们可得:

把它转成矩阵形式:
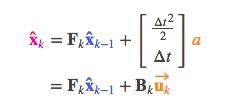
是控制矩阵,
是控制向量。如果外部环境异常简单,我们可以忽略这部分内容,但是如果添加了外部影响后,模型的准确率还是上不去,这又是为什么呢?
外部不确定性
如果状态根据自己的属性发展,一切都很好。 如果状态根据外力发展,只要我们知道那些外部力量是什么,一切都仍然很好。
但是,如果存在我们不知道的力量呢?当我们监控无人机时,它可能会受到风的影响;当我们跟踪轮式机器人时,它的轮胎可能会打滑,或者粗糙地面会降低它的移速。这些因素是难以掌握的,如果出现其中的任意一种情况,预测结果就难以保障。
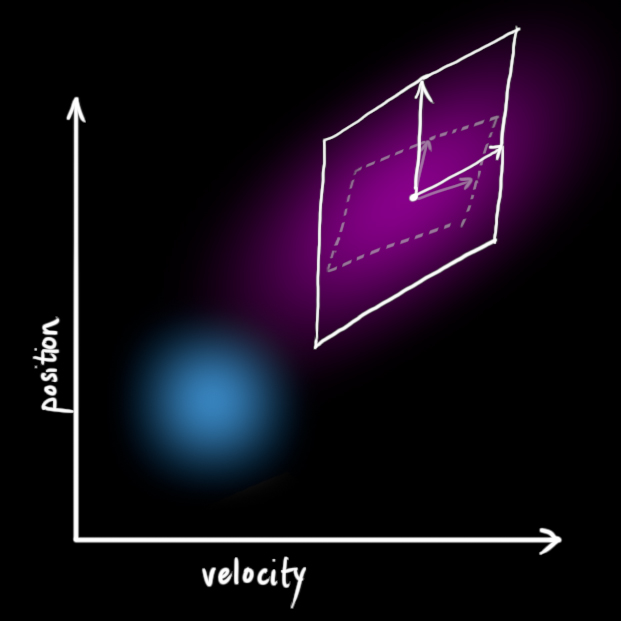
这要求我们在每个预测步骤后再加上一些新的不确定性,来模拟和“世界”相关的所有不确定性:
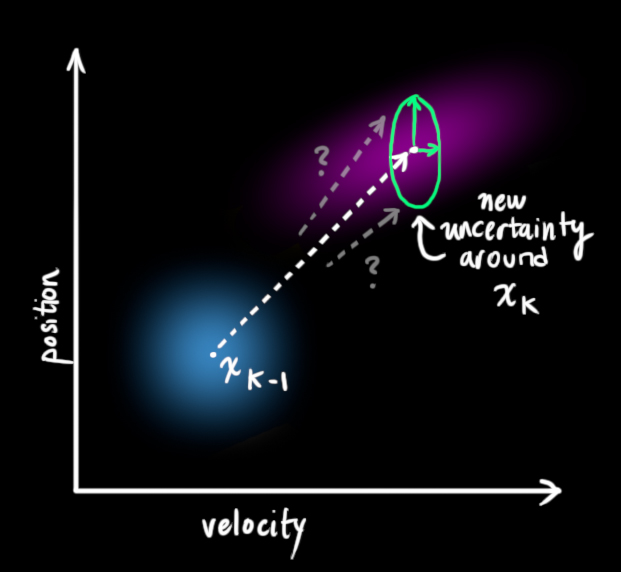
如上图所示,加上外部不确定性后, 的每个预测状态都可能会移动到另一点,也就是蓝色的高斯分布会移动到紫色高斯分布的位置,并且具有协方差
。换句话说,我们把这些不确定影响视为协方差
的噪声。
这个紫色的高斯分布拥有和原分布相同的均值,但协方差不同。
我们在原式上加入 :

简而言之,这里:
是基于
和
校正后得到的预测。
是基于
和
得到的预测。
现在,有了这些概念介绍,我们可以把传感器数据输入其中。
通过测量来细化估计值
我们可能有好几个传感器,它们一起提供有关系统状态的信息。传感器的作用不是我们关心的重点,它可以读取位置,可以读取速度,重点是,它能告诉我们关于状态的间接信息——它是状态下产生的一组读数。
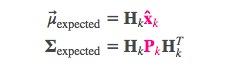
请注意,读数的规模和状态的规模不一定相同,所以我们把传感器读数矩阵设为 。
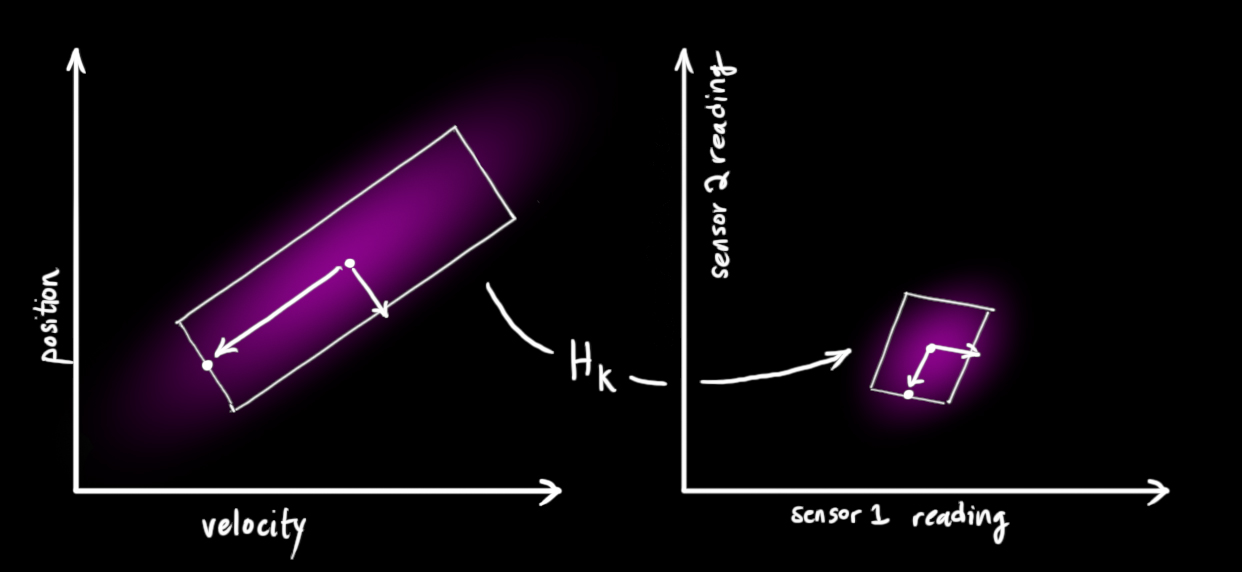
把这些分布转换为一般形式:
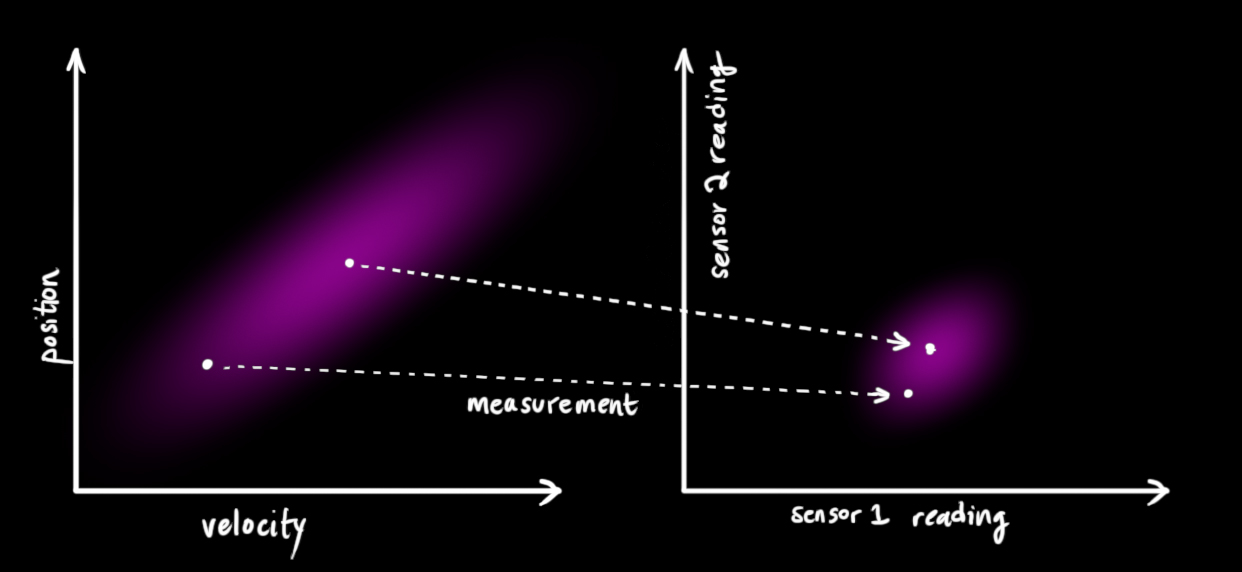
卡尔曼滤波的一大优点是擅长处理传感器噪声。换句话说,由于种种因素,传感器记录的信息其实是不准的,一个状态事实上可以产生多种读数。
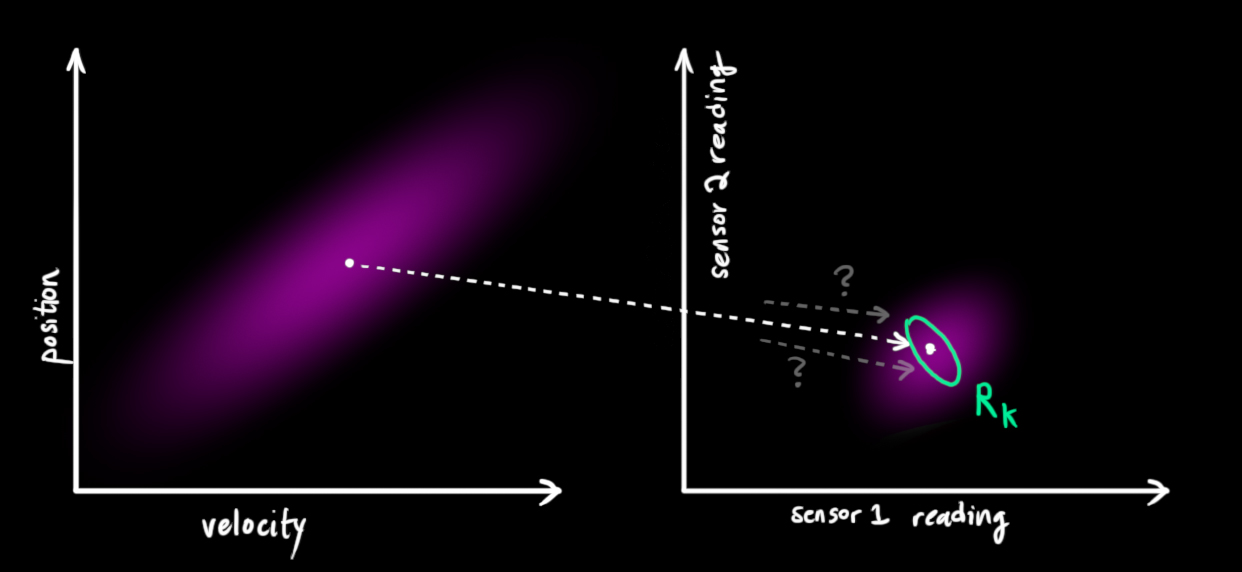
从我们观察到的每个读数中,我们可能会猜测我们的系统处于特定状态。但由于存在不确定性,一些状态比其他状态更有可能产生我们所看到的读数:
我们将这种不确定性(即传感器噪声)的协方差设为 ,读数的分布均值设为
。
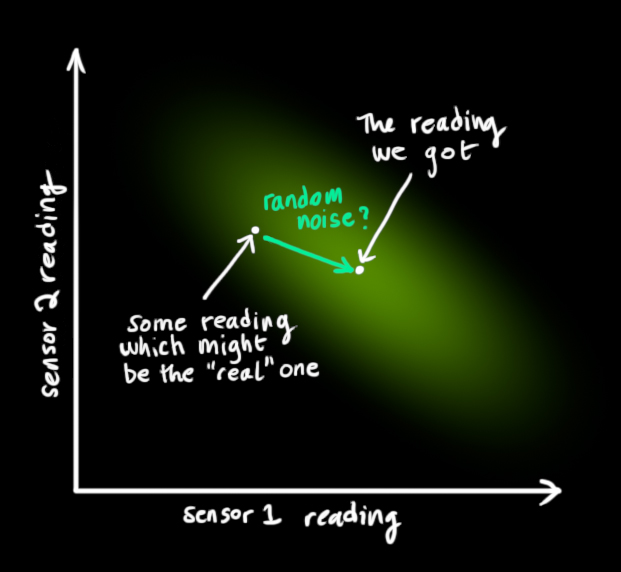
现在我们得到了两块高斯分布,一块围绕预测的均值,另一块围绕传感器读数。
如果要生成靠谱预测,模型必须调和这两个信息。也就是说,对于任何可能的读数 ,这两种方法预测的状态都有可能是准的,也都有可能是不准的。重点是我们怎么找到这两个准确率。
最简单的方法是两者相乘:
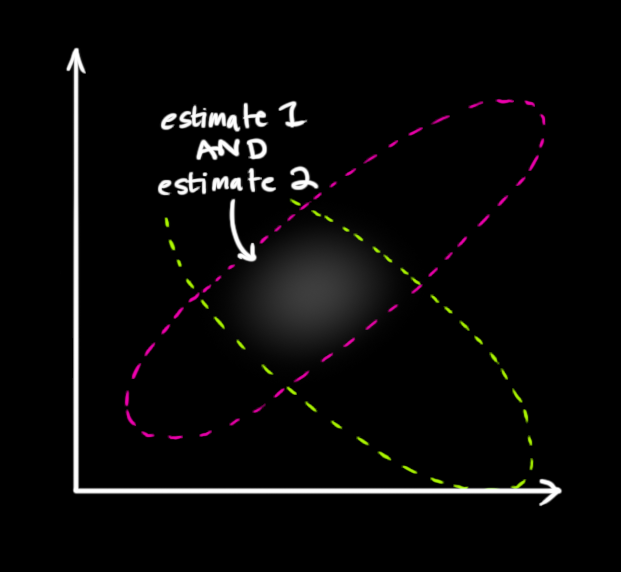
两块高斯分布相乘后,我们可以得到它们的重叠部分,这也是会出现最佳估计的区域。换个角度看,它看起来也符合高斯分布:
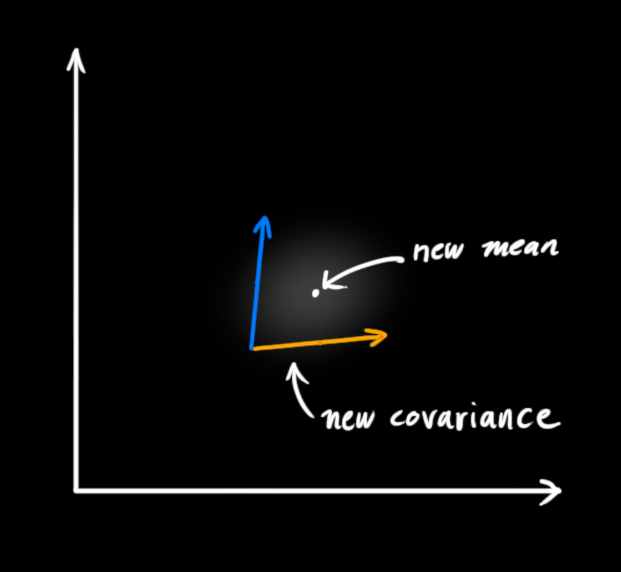
事实证明,当你把两个高斯分布和它们各自的均值和协方差矩阵相乘时,你会得到一个拥有独立均值和协方差矩阵的新高斯分布。最后剩下的问题就不难解决了:我们必须有一个公式来从旧的参数中获取这些新参数!
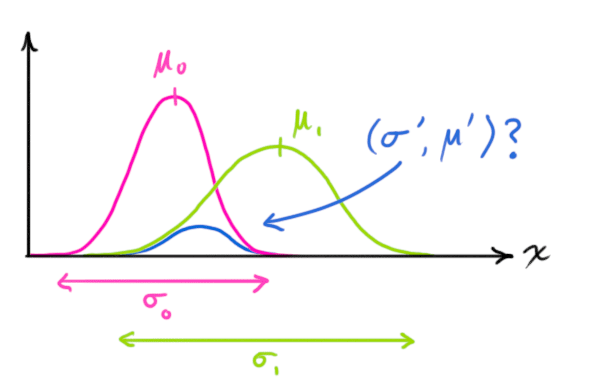
结合高斯
让我们从一维看起,设方差为 ,均值为
,一个标准一维高斯钟形曲线方程如下所示:

那么两条高斯曲线相乘呢?

把这个式子按照一维方程进行扩展,可得:

如果有些太复杂,我们用k简化一下:

以上是一维的内容,如果是多维空间,把这个式子转成矩阵格式:

这个矩阵 就是我们说的卡尔曼增益,easy!
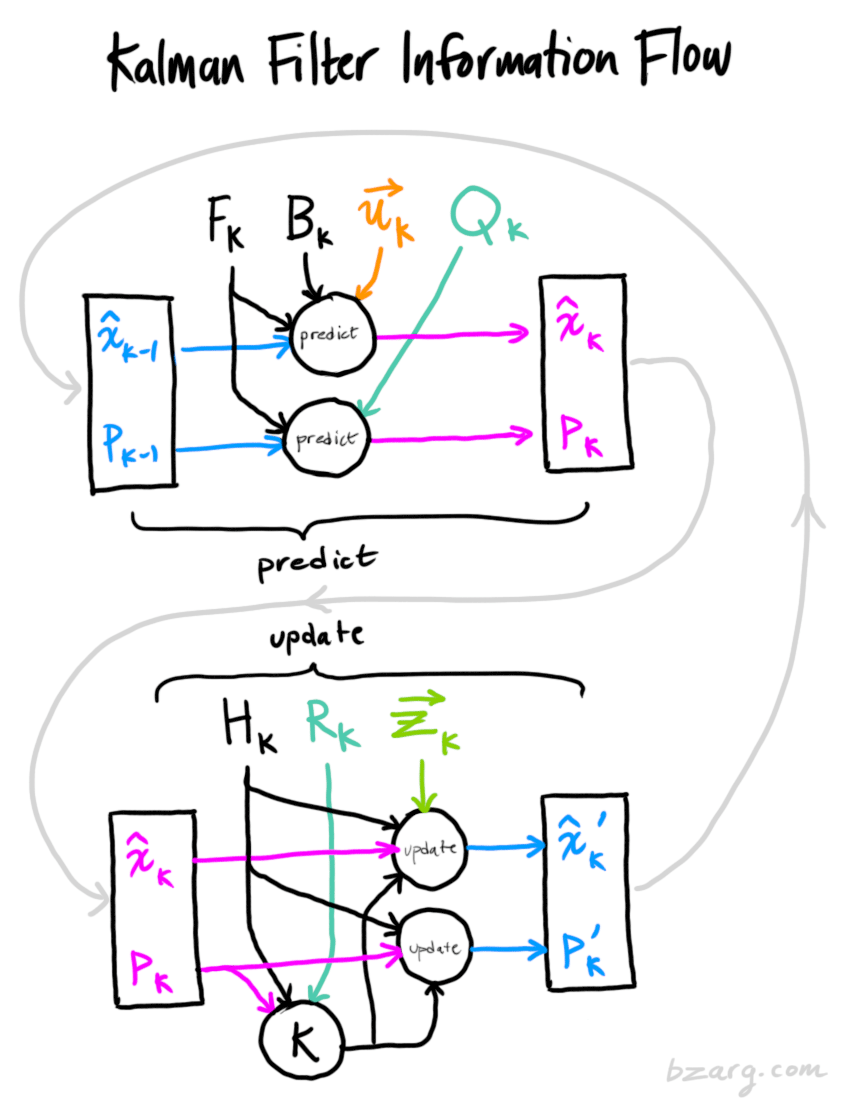
把它们结合在一起
截至目前,我们有用矩阵 预测的分布,有用传感器读数
预测的分布。把它们代入上节的矩阵等式中:
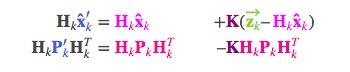
相应的,卡尔曼增益就是:

考虑到 里还包含着一个
,我们再精简一下上式:

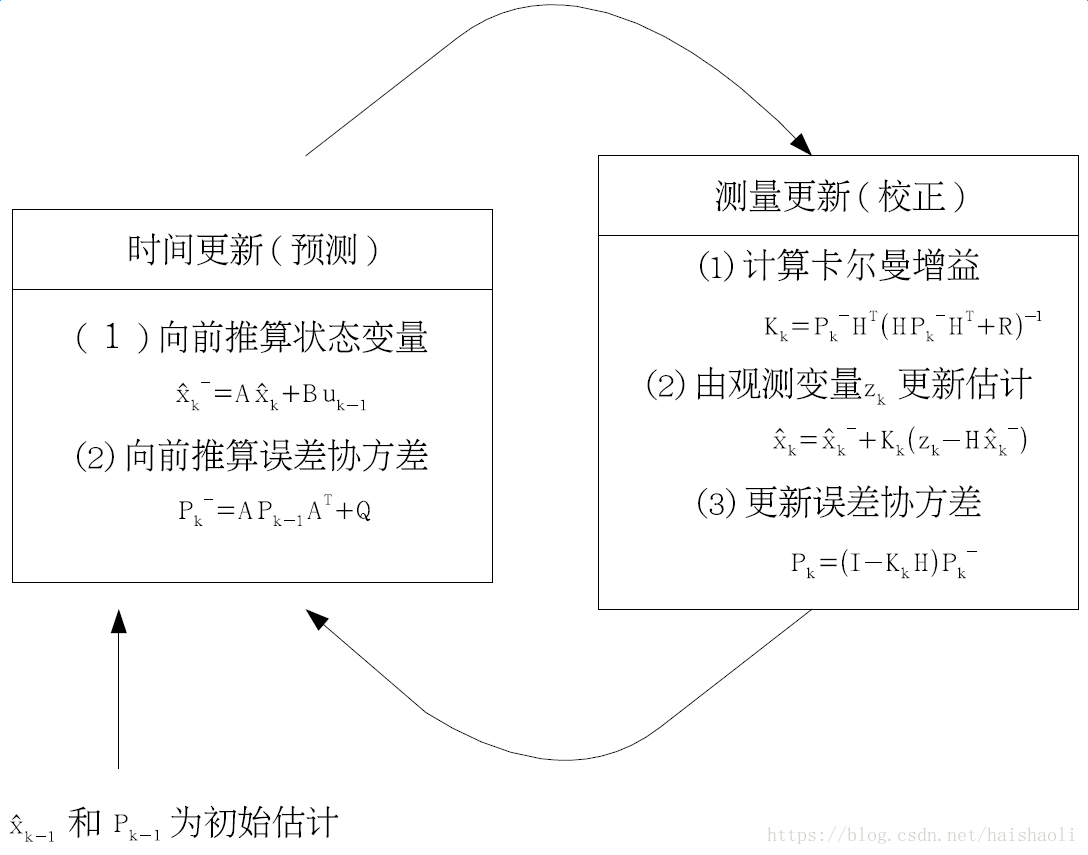
最后, 是我们的最佳估计值,我们可以把它继续放进去做另一轮预测:
应用例子:估计小车的运动状态
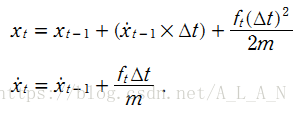
1、数学模型:
有一个匀加速运动的小车,它受到的合力为ft,由匀加速运动的位移和速度公式,能得到由t-1到t时刻的位移和速度变化公式:
该系统的状态向量包括位移和速度,分别用xt和xt的导数表示。控制输入变量为u,也就是加速度,于是有如下形式:
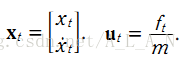
所以这个系统的状态方程为:

这里对应的矩阵A大小为2*2,矩阵B大小为2*1.
注意Z是测量值,大小为m*1,H也是状态变量到测量的转换矩阵,大小为m*n。随机变量v是测量噪声。
假设车是匀加速远离我们,站在原点用超声波测量小车离我们的距离。
对于小车匀加速运动的模型,假设系统的噪声向量只存在速度分量上,且速度噪声的方差是一个常量0.01,位移分量上的系统噪声为0.测量值只有位移,它的协方差矩阵大小是1*1,就是测量噪声的方差本身。

Q中,叠加在速度上系统噪声方差为0.01,位移上的为0,它们间的协方差为0,即噪声间没有关联。
2、C++实现代码:
#include <iostream>
#include <fstream>
#include <string>
#include <vector>
#include <Eigen/Dense>//包含Eigen矩阵运算库,用于矩阵计算
#include <cmath>
#include <limits>//用于生成随机分布数列
using namespace std;
using Eigen::MatrixXd;
int main(int argc, char **argv[])
{
//""中是txt文件路径,注意:路径要用//隔开
ofstream fout("..//result.txt");
double generateGaussianNoise(double mu, double sigma);//随机高斯分布数列生成器函数
const double delta_t = 0.1;//控制周期,100ms
const int num = 100;//迭代次数
const double acc = 10;//加速度,ft/m
MatrixXd A(2, 2);
A(0, 0) = 1;
A(1, 0) = 0;
A(0, 1) = delta_t;
A(1, 1) = 1;
MatrixXd B(2, 1);
B(0, 0) = pow(delta_t, 2) / 2;
B(1, 0) = delta_t;
MatrixXd H(1, 2);//测量的是小车的位移,速度为0
H(0, 0) = 1;
H(0, 1) = 0;
MatrixXd Q(2, 2);//过程激励噪声协方差,假设系统的噪声向量只存在速度分量上,且速度噪声的方差是一个常量0.01,位移分量上的系统噪声为0
Q(0, 0) = 0;
Q(1, 0) = 0;
Q(0, 1) = 0;
Q(1, 1) = 0.01;
MatrixXd R(1, 1);//观测噪声协方差,测量值只有位移,它的协方差矩阵大小是1*1,就是测量噪声的方差本身。
R(0, 0) = 10;
//time初始化,产生时间序列
vector<double> time(100, 0);
for (decltype(time.size()) i = 0; i != num; ++i) {
time[i] = i * delta_t;
//cout<<time[i]<<endl;
}
MatrixXd X_real(2, 1);
vector<MatrixXd> x_real, rand;
//生成高斯分布的随机数
for (int i = 0; i<100; ++i) {
MatrixXd a(1, 1);
a(0, 0) = generateGaussianNoise(0, sqrt(10));
rand.push_back(a);
}
//生成真实的位移值
for (int i = 0; i < num; ++i) {
X_real(0, 0) = 0.5 * acc * pow(time[i], 2);
X_real(1, 0) = 0;
x_real.push_back(X_real);
}
//变量定义,包括状态预测值,状态估计值,测量值,预测状态与真实状态的协方差矩阵,估计状态和真实状态的协方差矩阵,初始值均为零
MatrixXd X_evlt = MatrixXd::Constant(2, 1, 0), X_pdct = MatrixXd::Constant(2, 1, 0), Z_meas = MatrixXd::Constant(1, 1, 0),
Pk = MatrixXd::Constant(2, 2, 0), Pk_p = MatrixXd::Constant(2, 2, 0), K = MatrixXd::Constant(2, 1, 0);
vector<MatrixXd> x_evlt, x_pdct, z_meas, pk, pk_p, k;
x_evlt.push_back(X_evlt);
x_pdct.push_back(X_pdct);
z_meas.push_back(Z_meas);
pk.push_back(Pk);
pk_p.push_back(Pk_p);
k.push_back(K);
//开始迭代
for (int i = 1; i < num; ++i) {
//预测值
X_pdct = A * x_evlt[i - 1] + B * acc;
x_pdct.push_back(X_pdct);
//预测状态与真实状态的协方差矩阵,Pk'
Pk_p = A * pk[i - 1] * A.transpose() + Q;
pk_p.push_back(Pk_p);
//K:2x1
MatrixXd tmp(1, 1);
tmp = H * pk_p[i] * H.transpose() + R;
K = pk_p[i] * H.transpose() * tmp.inverse();
k.push_back(K);
//测量值z
Z_meas = H * x_real[i] + rand[i];
z_meas.push_back(Z_meas);
//估计值
X_evlt = x_pdct[i] + k[i] * (z_meas[i] - H * x_pdct[i]);
x_evlt.push_back(X_evlt);
//估计状态和真实状态的协方差矩阵,Pk
Pk = (MatrixXd::Identity(2, 2) - k[i] * H) * pk_p[i];
pk.push_back(Pk);
}
cout << "含噪声测量" << " " << "后验估计" << " " << "真值" << " " << endl;
for (int i = 0; i < num; ++i) {
cout<<z_meas[i]<<" "<<x_evlt[i](0,0)<<" "<<x_real[i](0,0)<<endl;
fout << z_meas[i] << " " << x_evlt[i](0, 0) << " " << x_real[i](0, 0) << endl;//输出到txt文档,用于matlab绘图
//cout<<k[i](1,0)<<endl;
//fout<<rand[i](0,0)<<endl;
//fout<<x_pdct[i](0,0)<<endl;
}
fout.close();
getchar();
return 0;
}
//生成高斯分布随机数的函数,网上找的
double generateGaussianNoise(double mu, double sigma)
{
const double epsilon = std::numeric_limits<double>::min();
const double two_pi = 2.0*3.14159265358979323846;
static double z0, z1;
static bool generate;
generate = !generate;
if (!generate)
return z1 * sigma + mu;
double u1, u2;
do
{
u1 = rand() * (1.0 / RAND_MAX);
u2 = rand() * (1.0 / RAND_MAX);
} while (u1 <= epsilon);
z0 = sqrt(-2.0 * log(u1)) * cos(two_pi * u2);
z1 = sqrt(-2.0 * log(u1)) * sin(two_pi * u2);
return z0 * sigma + mu;
}
3、MATLAB绘图:
a = dlmread('result.txt');
plot(a)