原教程地址:KalmanFilter.NET
卡尔曼滤波广泛应用在雷达系统(目标跟踪)中,但是其实它还可以应用在任何需要估算和预测的领域。
一、一维卡尔曼滤波
通过8个数值例子介绍卡尔曼滤波,涉及平均数、方差、标准差等,最终可以自行设计出一个一维的卡尔曼滤波算法。
1.1 背景知识
平均值、期望值、方差、标准差
对于一个跟踪和控制系统,最大的问题计时在存在不确定性的前提下提供一个准确的有用信息。
卡尔曼滤波就是一种常用且重要的估算方法,它在预估时默认输入信息不准确,同时也根据上一次系统的预估值来预估下一次的系统状态,测量噪声和处理噪声的存在可能使得动态模型(描述输入与输出关系的方法)估算出来的结果与真实值相差甚远,因此需要对噪声进行处理。
平均值和期望值的区别在于,用可观测状态计算出的是均值,一般用 μ \mu μ 表示,而对于无法获得真实值的隐变量,平均多次测量值估计的结果称为期望值,一般用 E E E 表示。
方差和标准差,方差 Variance 用来衡量一组结果的离散程度,标准差 Standard Deviation 则是方差的算数平方根,两者分别用 σ 2 \sigma^2 σ2 和 σ \sigma σ 表示。
方差、标准差在完全样本中的计算和在抽样样本中的计算是有区别的
在完全样本中:
σ 2 = 1 N ∑ n = 1 N ( x n − μ ) 2 , σ = 1 N ∑ n = 1 N ( x n − μ ) 2 \sigma^2=\frac{1}{N}\sum^{N}_{n=1}(x_n-\mu)^2,\sigma=\sqrt{\frac{1}{N}\sum^{N}_{n=1}(x_n-\mu)^2} σ2=N1n=1∑N(xn−μ)2,σ=N1n=1∑N(xn−μ)2
在抽样样本中:
σ 2 = 1 N − 1 ∑ n = 1 N ( x n − μ ) 2 , σ = 1 N − 1 ∑ n = 1 N ( x n − μ ) 2 \sigma^2=\frac{1}{N-1}\sum^{N}_{n=1}(x_n-\mu)^2,\sigma=\sqrt{\frac{1}{N-1}\sum^{N}_{n=1}(x_n-\mu)^2} σ2=N−11n=1∑N(xn−μ)2,σ=N−11n=1∑N(xn−μ)2
正太分布
很多自然现象都遵循正太分布,也称为高斯分布,可以通过以下等式描述:
f ( x ; μ , σ 2 ) = 1 2 π σ 2 e − ( x − μ ) 2 2 σ 2 f(x;\mu,\sigma^2)=\frac{1}{\sqrt{2\pi\sigma^2}}e^{\frac{-(x-\mu)^2}{2\sigma^2}} f(x;μ,σ2)=2πσ21e2σ2−(x−μ)2
高斯曲线也被称为正太分布的概率密度函数,如下图所示,以及正太分布在 μ ± σ \mu\pm\sigma μ±σ、 μ ± 2 σ \mu\pm2\sigma μ±2σ、 μ ± 3 σ \mu\pm3\sigma μ±3σ 的比例,通常,测量误差呈正太分布。


随机变量分为连续随机变量和离散随机变量,所有的测量值都是连续随机变量。
估计的准确度与精密度
估计用来估算系统的不可见状态,可以通过雷达等传感器估计飞机位置,并通过使用多个传感器和高级估计及追踪算法(如卡尔曼滤波)来显著提升估计精度。
准确度表示测量结果与真实值的接近程度。精密度表示测量结果的再现性。

随机误差导致方差,高/低精密度系统表示系统方差/不确定性的大小,而高/低精度系统表示系统系统性误差(偏差)的大小。对测量值进行平均或平滑处理可以显著降低方差影响,但是无法修复固定的系统误差,教程中案例都假设为无偏系统。
以一张图进行总结

1.2 α − β − γ \alpha-\beta-\gamma α−β−γ 滤波器
静态模型案例-金条称重
估计一个静态模型的状态,
x ^ n , n = 1 n ( z 1 + z 2 + . . . + z n − 1 + z n ) = 1 n ∑ i = 1 n ( z i ) \hat{x}_{n,n}=\frac{1}{n}(z_1+z_2+...+z_{n-1}+z_n)=\frac{1}{n}\sum^{n}_{i=1}(z_i) x^n,n=n1(z1+z2+...+zn−1+zn)=n1i=1∑n(zi)
符号说明:
x x x 是测量值
z n z_n zn 是第 n n n 次的测量值
x ^ n , n \hat{x}_{n,n} x^n,n 是第 n n n 次测量后的估计值
x ^ n , n − 1 \hat{x}_{n,n-1} x^n,n−1 是 n − 1 n-1 n−1 次测量后对 n n n 时刻作出的先验估计值
x ^ n + 1 , n \hat{x}_{n+1,n} x^n+1,n 是 n n n 次测量后对 n + 1 n+1 n+1 时刻作出的先验估计值
因为案例中的动态模型是定值,因此 x ^ n + 1 , n = x ^ n , n \hat{x}_{n+1,n}=\hat{x}_{n,n} x^n+1,n=x^n,n
经过计算可以得到 x ^ n , n = x ^ n − 1 , n − 1 + 1 n ( z n − x ^ n − 1 , n − 1 ) \hat{x}_{n,n}=\hat{x}_{n-1,n-1}+\frac{1}{n}(z_n-\hat{x}_{n-1,n-1}) x^n,n=x^n−1,n−1+n1(zn−x^n−1,n−1),这就是一个状态更新方程,可以将其总结为:
当前状态估计 = 当前状态估计的先验估计值 + F a c t o r × ( 测量值 − 当前状态估计的先验估计值 ) 当前状态估计=当前状态估计的先验估计值+Factor\times(测量值-当前状态估计的先验估计值) 当前状态估计=当前状态估计的先验估计值+Factor×(测量值−当前状态估计的先验估计值)
这里的 F a c t o r Factor Factor在卡尔曼滤波中被称为卡尔曼增益,记为 K n K_n Kn ,这里暂以 α n \alpha_n αn 代替 K n K_n Kn,状态更性方程可以写为如下,其中的 ( z n − x n , n − 1 ) (z_n-x_{n,n-1}) (zn−xn,n−1)为观测残差/更新,包含了新的观测信息。
x ^ n , n = x ^ n , n − 1 + α n ( z n − x ^ n , n − 1 ) \hat{x}_{n,n}=\hat{x}_{n,n-1}+\alpha_n(z_n-\hat{x}_{n,n-1}) x^n,n=x^n,n−1+αn(zn−x^n,n−1)
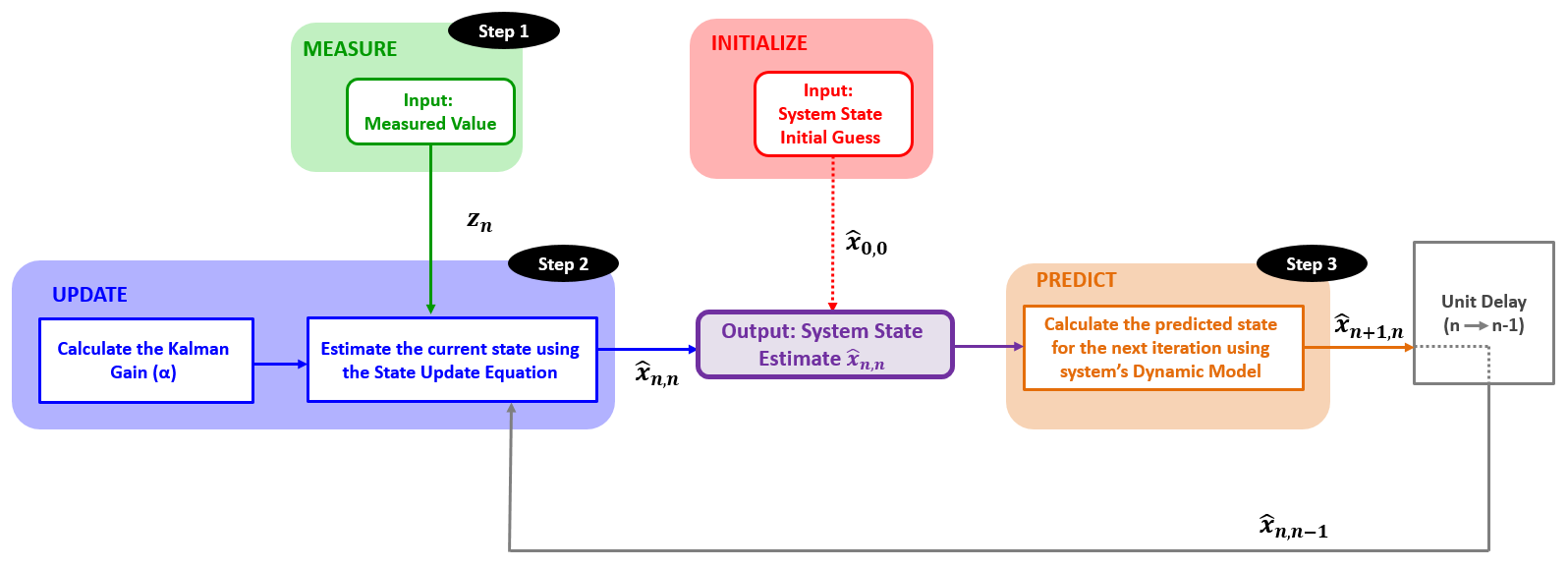
下面是整个估计过程:
一维空间追踪匀速飞行器
假设一个一维空间,一架飞行器向远离/接近雷达方向恒速飞行,雷达角度、飞机高度不变。 x n x_n xn 表示飞行器在 n n n 时的航程,雷达以恒定频率向目标发射追踪波束,周期为 Δ t \Delta t Δt,可以用以下两个方程描述运动:
x n + 1 = x n + Δ t x ˙ n x ˙ n + 1 = x ˙ n x_{n+1}=x_n+\Delta t\dot{x}_n\\ \dot{x}_{n+1}=\dot{x}_n xn+1=xn+Δtx˙nx˙n+1=x˙n
以上的方程组可以称为状态外推方程(State Exploration Equation)/过渡方程/预测方程,也是卡尔曼滤波的方程之一。
设定雷达跟踪周期 Δ t \Delta t Δt 为5秒,假设在 n − 1 n-1 n−1 时无人机估计航程30000m,估计速度40m/s。可以外推预测 n n n 时目标位置和速度值:
x ^ n , n − 1 = x ^ n − 1 , n − 1 + Δ t x ˙ ^ n − 1 , n − 1 = 30000 + 5 ∗ 40 = 30200 m x ˙ ^ n , n − 1 = x ˙ ^ n − 1 , n − 1 = 40 m / s \hat{x}_{n,n-1}=\hat{x}_{n-1,n-1}+\Delta t\hat{\dot{x}}_{n-1,n-1}=30000+5*40=30200m\\\ \\ \hat{\dot{x}}_{n,n-1}=\hat{\dot{x}}_{n-1,n-1}=40m/s x^n,n−1=x^n−1,n−1+Δtx˙^n−1,n−1=30000+5∗40=30200m x˙^n,n−1=x˙^n−1,n−1=40m/s
如果在 n n n时雷达测量航程( z n z_n zn)为30110,与预测值存在90m的偏差,可能有雷达测量误差、飞行器速度误差两方面因素导致.
下面写下飞行器速度的状态更新方程:
x ˙ ^ n = x ˙ ^ n , n − 1 + β ( z n − x ^ n , n − 1 Δ t ) \hat{\dot{x}}_{n}=\hat{\dot{x}}_{n,n-1}+\beta(\frac{z_n-\hat{x}_{n,n-1}}{\Delta t}) x˙^n=x˙^n,n−1+β(Δtzn−x^n,n−1)
这里的系数 β \beta β 值取决于雷达精度:
(1)如果雷达精度高,倾向于是飞行器速度变化导致航程的测量偏差,则将 β \beta β调高。
(2)如果雷达精度低,倾向于是雷达测量误差导致航程的测量偏差,则将 β \beta β调低。
下面再写出飞行器位置的状态更新方程:
x ^ n , n = x ^ n , n − 1 + α ( z n − x ^ n , n − 1 ) \hat{x}_{n,n}=\hat{x}_{n,n-1}+\alpha(z_n-\hat{x}_{n,n-1}) x^n,n=x^n,n−1+α(zn−x^n,n−1)
同样,这里的系数 α \alpha α 值取决于雷达精度, α \alpha α 在 0~1 之间, α = 1 \alpha=1 α=1,则估计航程等于测量航程, α = 0 \alpha=0 α=0,则测量没有意义。
由此得到雷达追踪器的状态更性方程组,也被称为 α − β \alpha-\beta α−β 轨迹更新方程/ α − β \alpha-\beta α−β 轨迹滤波方程。
α , β \alpha,\beta α,β的值取决于测量精度,在0~1之间,对精度越高的设备,测量权重越高,此时滤波器会对目标速度变化作出快速响应;而如果精度较低,则采用低 α 、 β \alpha、\beta α、β,降低测量中的不确定性。
注:有些教材中 α − β \alpha-\beta α−β 滤波被写为 g-h 滤波。
一维空间中追踪加速飞行器
设定一架战斗机先以50m/s的恒定速度飞行15秒,然后以 8 m / s 2 8 m/s^2 8m/s2的加速度匀加速飞行35秒。


使用 α − β \alpha-\beta α−β 滤波器进行追踪,通过每次周期的速度估计考虑加速度带来的影响,会看到真实值或测量值与估计值之间存在一个固定的差值,被称为滞后误差(lag error),它的其他常见名称还有:动态误差、系统误差、偏移误差、截断误差。
因此需要使用 α − β − γ \alpha-\beta-\gamma α−β−γ 滤波器进行跟踪,将目标加速度考虑进去:
状态外推方程变为:
x ^ n + 1 , n = x ^ n , n + x ˙ ^ n , n Δ t + x ¨ ^ n , n Δ t 2 2 x ˙ ^ n + 1 , n = x ˙ ^ n , n + x ¨ ^ n , n Δ t x ¨ ^ n + 1 , n = x ¨ ^ n , n \hat{x}_{n+1,n}=\hat{x}_{n,n}+\hat{\dot{x}}_{n,n}\Delta t+\hat{\ddot{x}}_{n,n}\frac{\Delta t^2}{2}\\\ \\ \hat{\dot{x}}_{n+1,n}=\hat{\dot{x}}_{n,n}+\hat{\ddot{x}}_{n,n}\Delta t\\\ \\ \hat{\ddot{x}}_{n+1,n}=\hat{\ddot{x}}_{n,n} x^n+1,n=x^n,n+x˙^n,nΔt+x¨^n,n2Δt2 x˙^n+1,n=x˙^n,n+x¨^n,nΔt x¨^n+1,n=x¨^n,n
状态更新方程变为
x ^ n , n = x ^ n , n − 1 + α ( z n − x ^ n , n − 1 ) x ˙ ^ n , n = x ˙ ^ n , n − 1 + β ( z n − x ^ n , n − 1 Δ t ) x ¨ ^ n , n = x ¨ ^ n , n − 1 + γ ( z n − x ^ n , n − 1 0.5 Δ t 2 ) \hat{x}_{n,n}=\hat{x}_{n,n-1}+\alpha(z_n-\hat{x}_{n,n-1})\\\ \\ \hat{\dot{x}}_{n,n}=\hat{\dot{x}}_{n,n-1}+\beta(\frac{z_n-\hat{x}_{n,n-1}}{\Delta t})\\\ \\ \hat{\ddot{x}}_{n,n}=\hat{\ddot{x}}_{n,n-1}+\gamma(\frac{z_n-\hat{x}_{n,n-1}}{0.5\Delta t^2}) x^n,n=x^n,n−1+α(zn−x^n,n−1) x˙^n,n=x˙^n,n−1+β(Δtzn−x^n,n−1) x¨^n,n=x¨^n,n−1+γ(0.5Δt2zn−x^n,n−1)
包含加速度模型的 α − β − γ \alpha-\beta-\gamma α−β−γ 滤波器可以追踪匀加速运动的目标,并且消除滞后误差。



然而,真正的目标动态模型仍可能有很多不同的因素,使得 α − β − γ \alpha-\beta-\gamma α−β−γ 滤波器失效。
1.3 卡尔曼滤波
二、多维卡尔曼滤波
现实世界中的卡尔曼滤波都是多维的,这一部分介绍多维的卡尔曼滤波及其如何在矩阵中表示,涉及线性代数,将展示卡尔曼滤波的数学推导和动态系统模型,最终设计处一个多维的卡尔曼滤波算法。
三、扩展内容与现实问题
包括扩展卡尔曼滤波器、无迹卡尔曼滤波和在解决现实困难问题应用的卡尔曼滤波。