《动手学ROS2》9.4为FishBot配置IMU惯性测量单元
本系列教程作者:小鱼
公众号:鱼香ROS
QQ交流群:139707339
教学视频地址:小鱼的B站
完整文档地址:鱼香ROS官网
版权声明:如非允许禁止转载与商业用途。

9.4为FishBot配置IMU惯性测量单元
大家好,我是小鱼,上节课通过配置两轮差速控制器我们已经成功的让fishbot在gazebo中动了起来,本节课我们通过给fishbot的URDF配置IMU传感器插件,让IMU模块工作起来。
1.惯性测量单元IMU介绍
惯性测量单元是测量物体三轴姿态角(或角速率)以及加速度的装置。一般的,一个IMU包含了三个单轴的加速度计和三个单轴的陀螺,加速度计检测物体在载体坐标系统独立三轴的加速度信号,而陀螺检测载体相对于导航坐标系的角速度信号,测量物体在三维空间中的角速度和加速度,并以此解算出物体的姿态。在导航中有着很重要的应用价值。
上面这段话是小鱼从百科中摘抄出来的,你需要知道的一个关键点是IMU可以测量以下三组数据:
- 三维角度
- 三维加速度
- 三维角速度
1.1 IMU长啥样?
便宜的长这样:
贵的长这样:

不要钱的长什么样?

仿真的不要钱哈哈,接着我们来配置一下仿真的IMU。
2.Gazebo-IMU插件介绍
仿真的IMU也是对应一个后缀为.so的动态链接库,使用下面的指令可以查看所有的动态链接库:
ls /opt/ros/foxy/lib/libgazebo_ros*Copy to clipboardErrorCopied
/opt/ros/foxy/lib/libgazebo_ros2_control.so
/opt/ros/foxy/lib/libgazebo_ros_ackermann_drive.so
/opt/ros/foxy/lib/libgazebo_ros_bumper.so
/opt/ros/foxy/lib/libgazebo_ros_camera.so
/opt/ros/foxy/lib/libgazebo_ros_diff_drive.so
/opt/ros/foxy/lib/libgazebo_ros_elevator.so
/opt/ros/foxy/lib/libgazebo_ros_factory.so
/opt/ros/foxy/lib/libgazebo_ros_force.so
/opt/ros/foxy/lib/libgazebo_ros_force_system.so
/opt/ros/foxy/lib/libgazebo_ros_ft_sensor.so
/opt/ros/foxy/lib/libgazebo_ros_gps_sensor.so
/opt/ros/foxy/lib/libgazebo_ros_hand_of_god.so
/opt/ros/foxy/lib/libgazebo_ros_harness.so
/opt/ros/foxy/lib/libgazebo_ros_imu_sensor.so
/opt/ros/foxy/lib/libgazebo_ros_init.so
/opt/ros/foxy/lib/libgazebo_ros_joint_pose_trajectory.so
/opt/ros/foxy/lib/libgazebo_ros_joint_state_publisher.so
/opt/ros/foxy/lib/libgazebo_ros_node.so
/opt/ros/foxy/lib/libgazebo_ros_p3d.so
/opt/ros/foxy/lib/libgazebo_ros_planar_move.so
/opt/ros/foxy/lib/libgazebo_ros_projector.so
/opt/ros/foxy/lib/libgazebo_ros_properties.so
/opt/ros/foxy/lib/libgazebo_ros_ray_sensor.so
/opt/ros/foxy/lib/libgazebo_ros_state.so
/opt/ros/foxy/lib/libgazebo_ros_template.so
/opt/ros/foxy/lib/libgazebo_ros_tricycle_drive.so
/opt/ros/foxy/lib/libgazebo_ros_utils.so
/opt/ros/foxy/lib/libgazebo_ros_vacuum_gripper.so
/opt/ros/foxy/lib/libgazebo_ros_video.so
/opt/ros/foxy/lib/libgazebo_ros_wheel_slip.soCopy to clipboardErrorCopied
IMU对应的消息类型为sensor_msgs/msg/Imu
ros2 interface show sensor_msgs/msg/ImuCopy to clipboardErrorCopied
# This is a message to hold data from an IMU (Inertial Measurement Unit)
#
# Accelerations should be in m/s^2 (not in g's), and rotational velocity should be in rad/sec
#
# If the covariance of the measurement is known, it should be filled in (if all you know is the
# variance of each measurement, e.g. from the datasheet, just put those along the diagonal)
# A covariance matrix of all zeros will be interpreted as "covariance unknown", and to use the
# data a covariance will have to be assumed or gotten from some other source
#
# If you have no estimate for one of the data elements (e.g. your IMU doesn't produce an
# orientation estimate), please set element 0 of the associated covariance matrix to -1
# If you are interpreting this message, please check for a value of -1 in the first element of each
# covariance matrix, and disregard the associated estimate.
std_msgs/Header header
geometry_msgs/Quaternion orientation
float64[9] orientation_covariance # Row major about x, y, z axes
geometry_msgs/Vector3 angular_velocity
float64[9] angular_velocity_covariance # Row major about x, y, z axes
geometry_msgs/Vector3 linear_acceleration
float64[9] linear_acceleration_covariance # Row major x, y zCopy to clipboardErrorCopied
可以看到除了每个数据对应的三个协方差之外,每一个还都对应一个3*3的协方差矩阵。
3.给FIshbot配置IMU传感器
有了上节课的经验,我们可以很轻松的添加IMU传感器,但是还有一个需要注意的地方,为了更真实的模拟IMU传感器,我们需要给我们的仿真IMU传感器加点料。
加什么?加点高斯噪声,高斯噪声只需要指定平均值和标准差两个参数即可,不过因为IMU传感器的特殊性,我们还需要给模型添加两个偏差参数,分别是 平均值偏差和标准差偏差。
有关Gazebo仿真和噪声模型更深入的介绍可以参考小鱼发的两篇推文:
下面是IMU传感器的URDF配置代码,大家结合文章对应可以理解一下,IMU对应的插件库libgazebo_ros_imu_sensor.so
<gazebo reference="imu_link">
<sensor name="imu_sensor" type="imu">
<plugin filename="libgazebo_ros_imu_sensor.so" name="imu_plugin">
<ros>
<namespace>/</namespace>
<remapping>~/out:=imu</remapping>
</ros>
<initial_orientation_as_reference>false</initial_orientation_as_reference>
</plugin>
<always_on>true</always_on>
<update_rate>100</update_rate>
<visualize>true</visualize>
<imu>
<angular_velocity>
<x>
<noise type="gaussian">
<mean>0.0</mean>
<stddev>2e-4</stddev>
<bias_mean>0.0000075</bias_mean>
<bias_stddev>0.0000008</bias_stddev>
</noise>
</x>
<y>
<noise type="gaussian">
<mean>0.0</mean>
<stddev>2e-4</stddev>
<bias_mean>0.0000075</bias_mean>
<bias_stddev>0.0000008</bias_stddev>
</noise>
</y>
<z>
<noise type="gaussian">
<mean>0.0</mean>
<stddev>2e-4</stddev>
<bias_mean>0.0000075</bias_mean>
<bias_stddev>0.0000008</bias_stddev>
</noise>
</z>
</angular_velocity>
<linear_acceleration>
<x>
<noise type="gaussian">
<mean>0.0</mean>
<stddev>1.7e-2</stddev>
<bias_mean>0.1</bias_mean>
<bias_stddev>0.001</bias_stddev>
</noise>
</x>
<y>
<noise type="gaussian">
<mean>0.0</mean>
<stddev>1.7e-2</stddev>
<bias_mean>0.1</bias_mean>
<bias_stddev>0.001</bias_stddev>
</noise>
</y>
<z>
<noise type="gaussian">
<mean>0.0</mean>
<stddev>1.7e-2</stddev>
<bias_mean>0.1</bias_mean>
<bias_stddev>0.001</bias_stddev>
</noise>
</z>
</linear_acceleration>
</imu>
</sensor>
</gazebo>Copy to clipboardErrorCopied
将上面的代码加到fishbot_gazebo.urdf中,接着我们就可以进行测试了。
4.编译测试
编译
colcon buildCopy to clipboardErrorCopied
运行
ros2 launch fishbot_description gazebo.launch.pyCopy to clipboardErrorCopied
CLI看话题
ros2 topic list
ros2 topic info /imuCopy to clipboardErrorCopied
ros2 topic echo /imuCopy to clipboardErrorCopied
输出:
header:
stamp:
sec: 150
nanosec: 599000000
frame_id: base_footprint
orientation:
x: 3.434713830866392e-07
y: 7.119913105768616e-06
z: -0.00028312437320413914
w: 0.9999999598948884
orientation_covariance:
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
angular_velocity:
x: -0.00013597855247901325
y: 0.0006306135617081868
z: -0.00015794894627685146
angular_velocity_covariance:
- 4.0e-08
- 0.0
- 0.0
- 0.0
- 4.0e-08
- 0.0
- 0.0
- 0.0
- 4.0e-08
linear_acceleration:
x: 0.08679200038530369
y: 0.07753419258567491
z: 9.687910969061628
linear_acceleration_covariance:
- 0.00028900000000000003
- 0.0
- 0.0
- 0.0
- 0.00028900000000000003
- 0.0
- 0.0
- 0.0
- 0.00028900000000000003Copy to clipboardErrorCopied
用rqt可视化:
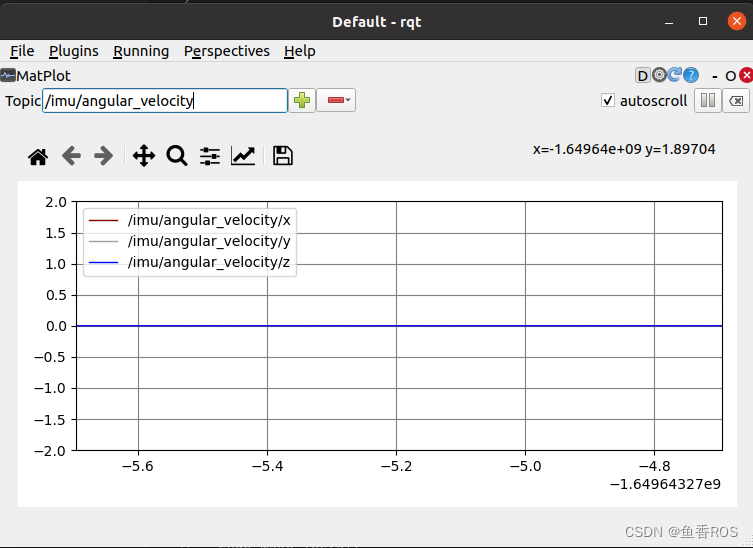
5.总结
本节我们对IMU传感器进行介绍,并通过gazbeo的imu插件完成了fishbot的IMU数据的输出。
最后还有小练习等着你:
- 再次启动遥控节点,控制fishbot,观察IMU传感器的数据变化
技术交流&&问题求助:
- 微信公众号及交流群:鱼香ROS
- 小鱼微信:AiIotRobot
- QQ交流群:139707339
- 版权保护:已加入“维权骑士”(rightknights.com)的版权保护计划为FishBot添加IMU传感器