ROS2 搭建vscode的debug调试环境
1、新建ROS工作空间并使用VSCode打开
1.1 新建工作空间并打开
首先新建一个文件夹,我命名为test_ros,在该文件夹中打开终端,执行以下命令来创建ROS工作环境:
第一种:标准流程建立空间
mkdir test_ros
cd test_ros
mkdir src
cd src
catkin_init_workspace
cd ../
catkin_make
第二种:简要流程建立空间
mkdir test_ros
cd test_ros
mkdir src
catkin_make
1.2 使用vscode打开工作空间
code .
1.3 vscode安装相关插件
2、foxy版本的ros相关文件修改
2.1 c_cpp_properties.json:
{
"configurations": [
{
"name": "Linux",
"includePath": [
"${workspaceFolder}/**",
"/opt/ros/foxy/include/**"
],
"defines": [],
"compilerPath": "/usr/bin/gcc",
"cStandard": "c99",
"cppStandard": "c++14",
"intelliSenseMode": "clang-x64"
}
],
"version": 4
}';
2.2 setting.json:
{
"editor.tabSize": 8,
"editor.rulers": [
100
],
"files.associations": {
"*.repos": "yaml",
"*.world": "xml",
"*.xacro": "xml",
"chrono": "cpp"
},
// Autocomplete from ros python packages
"python.autoComplete.extraPaths": [
"/opt/ros/foxy/lib/python3.8/site-packages/"
],
// Environment file lets vscode find python files within workspace
"python.envFile": "${workspaceFolder}/.env",
// Use the system installed version of autopep8
"python.formatting.autopep8Path": "/usr/bin/autopep8",
"python.formatting.autopep8Args": [
"--max-line-length=100"
],
"C_Cpp.default.intelliSenseMode": "clang-x64",
"C_Cpp.formatting": "Disabled",
"uncrustify.useReplaceOption": true,
"uncrustify.configPath.linux": "/opt/ros/foxy/lib/python3.8/site-packages/ament_uncrustify/configuration/ament_code_style.cfg",
"cSpell.words": [
"RTPS",
"athackst",
"autopep",
"cmake",
"cppcheck",
"cpplint",
"deque",
"devcontainer",
"ints",
"noqa",
"pytest",
"rclcpp",
"rclpy",
"repos",
"rosdistro",
"rosidl",
"uncrustify",
"xmllint"
],
"search.exclude": {
"**/node_modules": true,
"**/bower_components": true,
"**/*.code-search": true,
"**/build": true,
"**/install": true,
"**/log": true
},
"python.analysis.extraPaths": [
"/opt/ros/foxy/lib/python3.8/site-packages/"
],
"cSpell.allowCompoundWords": true,
"cSpell.ignorePaths": [
"**/package-lock.json",
"**/node_modules/**",
"**/vscode-extension/**",
"**/.git/objects/**",
".vscode",
".vscode-insiders",
".devcontainer/devcontainer.json"
]
}
2.3 task.json:
使用Ctrl+Shift+P
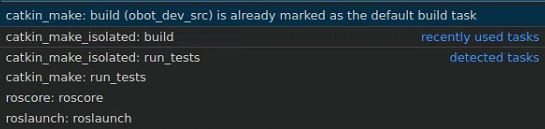
然后在搜索栏中搜索Configure Default Build Task
- Terminal -> Configure Default Build Task
- 选择 -> catkin_make:build
生成并修改task.json
{
// See https://go.microsoft.com/fwlink/?LinkId=733558
// for the documentation about the tasks.json format
"version": "2.0.0",
"tasks": [
// Build tasks
{
"label": "colcon make",
"detail": "Build workspace (default)",
"type": "shell",
"command": "colcon build --merge-install --cmake-args '-DCMAKE_BUILD_TYPE=RelWithDebInfo' -Wall -Wextra -Wpedantic",
"group": {
"kind": "build",
"isDefault": true
},
"problemMatcher": "$gcc"
}
]
}
然后再次Ctrl+Shift+B进行编译(此时已经自动),并会在build文件夹下出现compile_commands.json
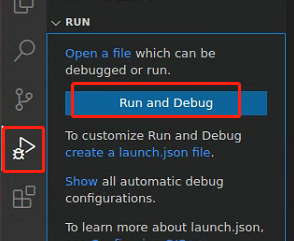
2.4 launch.json:
单击此处,创建 launch.json
{
// Use IntelliSense to learn about possible attributes.
// Hover to view descriptions of existing attributes.
// For more information, visit: https://go.microsoft.com/fwlink/?linkid=830387
"version": "0.2.0",
"configurations": [
// Example launch of a python file
{
"name": "Launch",
"type": "python",
"request": "launch",
"program": "${workspaceFolder}/install/${input:package}/bringup/launch/cleaner_gazebo.py",
"console": "integratedTerminal",
},
// Example gdb launch of a ros executable
{
"name": "(gdb) Launch",
"type": "cppdbg",
"request": "launch",
"program": "${workspaceFolder}/install/lib/${input:package}/${input:program}",
"args": [],
"stopAtEntry": true,
"cwd": "${workspaceFolder}",
"externalConsole": false,
"MIMode": "gdb",
"setupCommands": [
{
"description": "Enable pretty-printing for gdb",
"text": "-enable-pretty-printing",
"ignoreFailures": true
}
]
}
],
"inputs": [
{
"id": "package",
"type": "promptString",
"description": "Package name",
"default": "learning_ros2"
},
{
"id": "program",
"type": "promptString",
"description": "Program name",
"default": "ros2_talker"
}
]
}
3、melodic 版本的ros相关文件修改
3.1 c_cpp_properties.json:
可能还有一些头文件找不到,比如ros/ros.h,我们还需要配置一些东西。
用命令行编译我们写的c++代码,同时输出编译信息文件,这里以ROS为例
1、打开终端,输入以下命令:
catkin_make -DCMAKE_EXPORT_COMPILE_COMMANDS=Yes
2、这个命令会输出一个compile_commands.json文件在ROS工作空间的build文件夹下面
然后在c_cpp_properties.json文件添加下面一段话
"compileCommands": "${workspaceFolder}/build/compile_commands.json"
修改后的 c_cpp_properties.json 如下:
{
"configurations": [
{
"name": "Linux",
"includePath": [
"${workspaceFolder}/**"
],
"defines": [],
"compilerPath": "/usr/bin/gcc",
"cStandard": "c11",
"cppStandard": "c++17",
"intelliSenseMode": "clang-x64",
"compileCommands": "${workspaceFolder}/build/compile_commands.json"
}
],
"version": 4
}
3.2 setting.json:
{
"python.autoComplete.extraPaths": [
"/opt/ros/melodic/lib/python2.7/dist-packages"
],
"python.analysis.extraPaths": [
"/opt/ros/melodic/lib/python2.7/dist-packages"
],
"terminal.integrated.cursorBlinking": true,//控制终端光标是否闪烁
"terminal.integrated.fontSize": 12,//控制终端字号大小
"terminal.integrated.fontFamily": "monospace"//控制终端字体
}
2.3 task.json:
{
"version": "2.0.0",
"tasks": [
{
"label": "catkin_make", //代表提示的描述性信息
"type": "shell", //可以选择shell或者process,如果是shell代码是在shell里面运行一个命令,如果是process代表作为一个进程来运行
"command": "catkin_make",//这个是我们需要运行的命令
"args": [],//如果需要在命令后面加一些后缀,可以写在这里,比如-DCATKIN_WHITELIST_PACKAGES=“pac1;pac2”
"group": {
"kind":"build","isDefault":true},
"presentation": {
"reveal": "always"//可选always或者silence,代表是否输出信息
},
"problemMatcher": "$msCompile"
},
]
}
2.4 launch.json:
{
"version": "0.2.0",
"configurations": [
{
"name": "(gdb) Launch", // 配置名称,将会在调试配置下拉列表中显示
"type": "cppdbg", // 调试器类型 该值自动生成
"request": "launch", // 调试方式,还可以选择attach
"program": "${workspaceRoot}/devel/lib/waypoint_follower/pure_persuit", //要调试的程序(完整路径,支持相对路径)
"args": [], // 传递给上面程序的参数,没有参数留空即可
"stopAtEntry": false, // 是否停在程序入口点(停在main函数开始)
"cwd": "${workspaceRoot}", // 调试程序时的工作目录
"environment": [], //针对调试的程序,要添加到环境中的环境变量. 例如: [ { "name": "squid", "value": "clam" } ]
"externalConsole": false, //如果设置为true,则为应用程序启动外部控制台。 如果为false,则不会启动控制台,并使用VS Code的内置调试控制台。
"MIMode": "gdb", // VSCode要使用的调试工具
"setupCommands": [
{
"description": "Enable pretty-printing for gdb",
"text": "-enable-pretty-printing",
"ignoreFailures": true
}
]
}
]
}
3、测试程序
测试打印 hello world
#include<ros/ros.h>
#include<std_msgs/String.h>
#include<iostream>
#include<string>
#include<sstream>
using namespace std;
int main(int argc, char** argv)
{
ros::init(argc, argv,"talker");
ros::NodeHandle n;
ros::Publisher chatter_pub = n.advertise<std_msgs::String>("chatter",1000);
ros::Rate loop_rate(10);
int count = 0;
while( ros::ok() )
{
std_msgs::String msg;
std::stringstream ss;
ss << "hello world " << count;
msg.data = ss.str();
ROS_INFO("%s",msg.data.c_str());
chatter_pub.publish(msg);
ros::spinOnce();
loop_rate.sleep();
count++;
}
return 0;
}