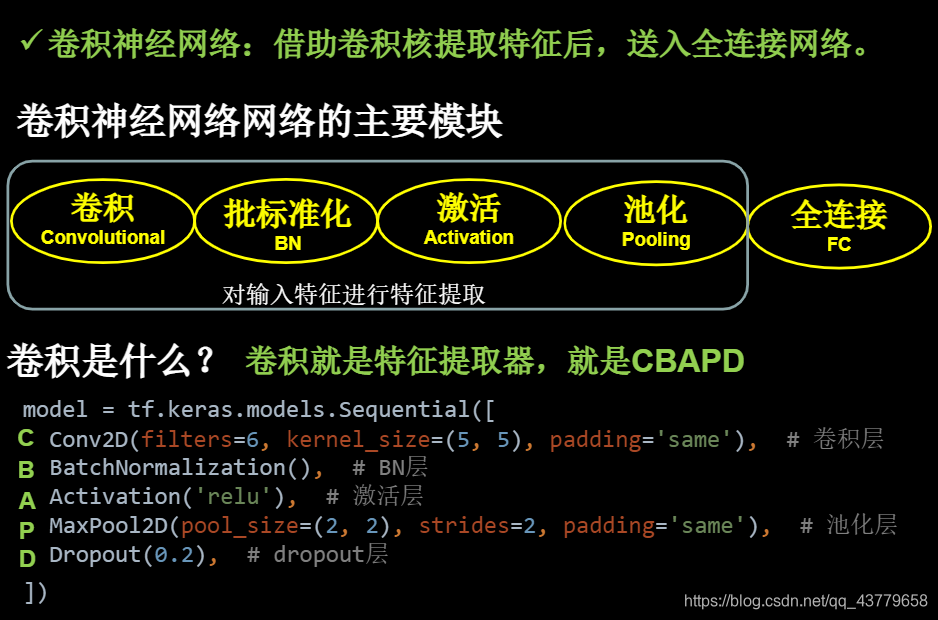
卷积神经网络
相关原理
Convolution

重点:
- 进行卷积时,卷积核与输入图的求和结果 会 加上一个偏置项b
- 得到的结果为输出特征的一个像素点
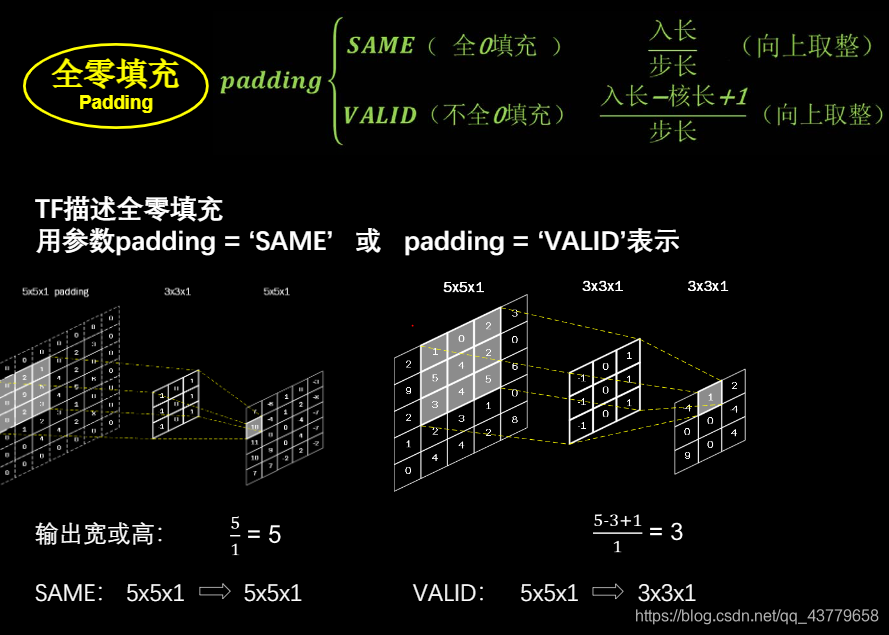
padding
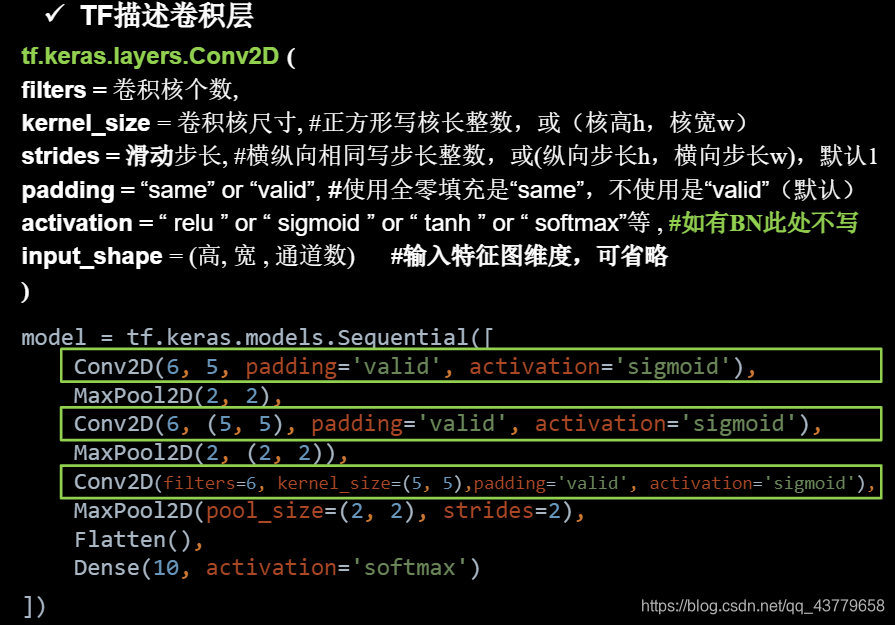
tf.keras.layers.Conv2D
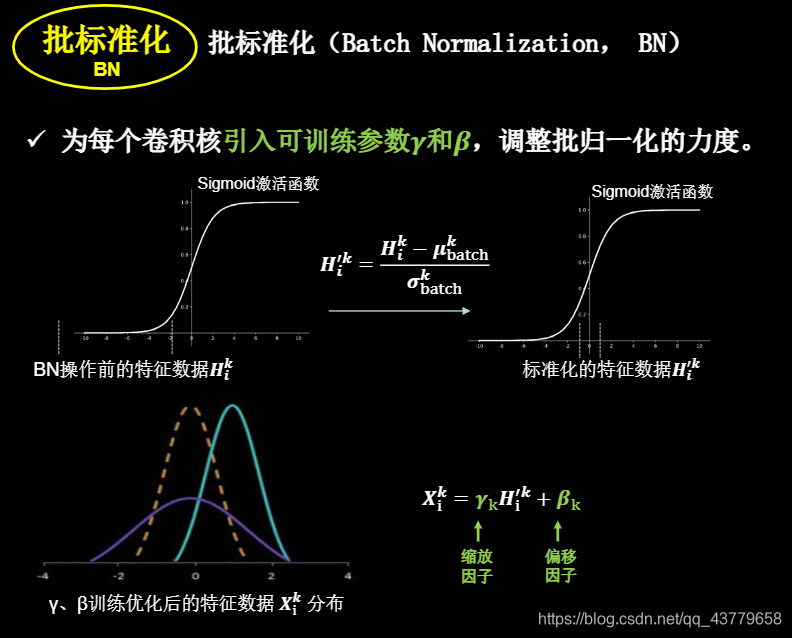
BN
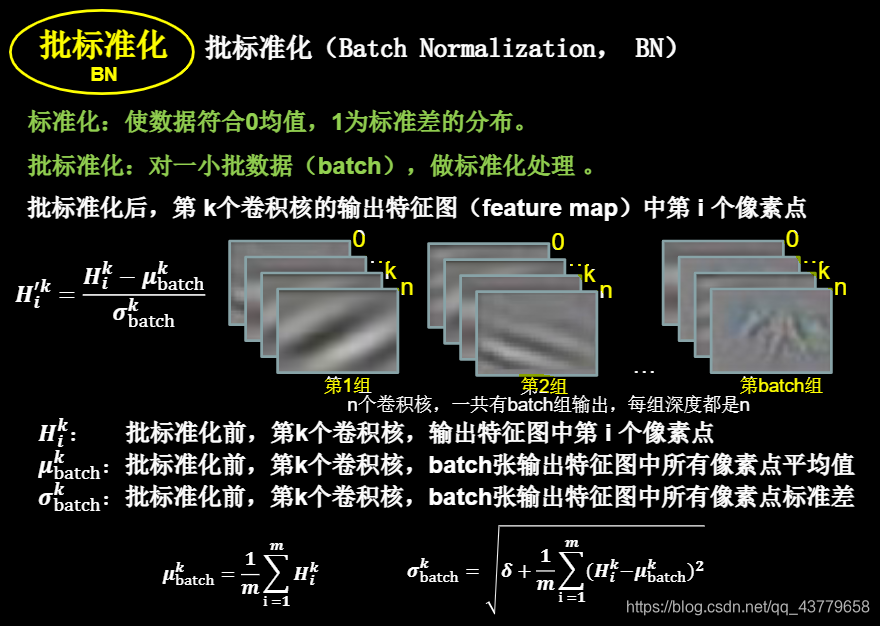
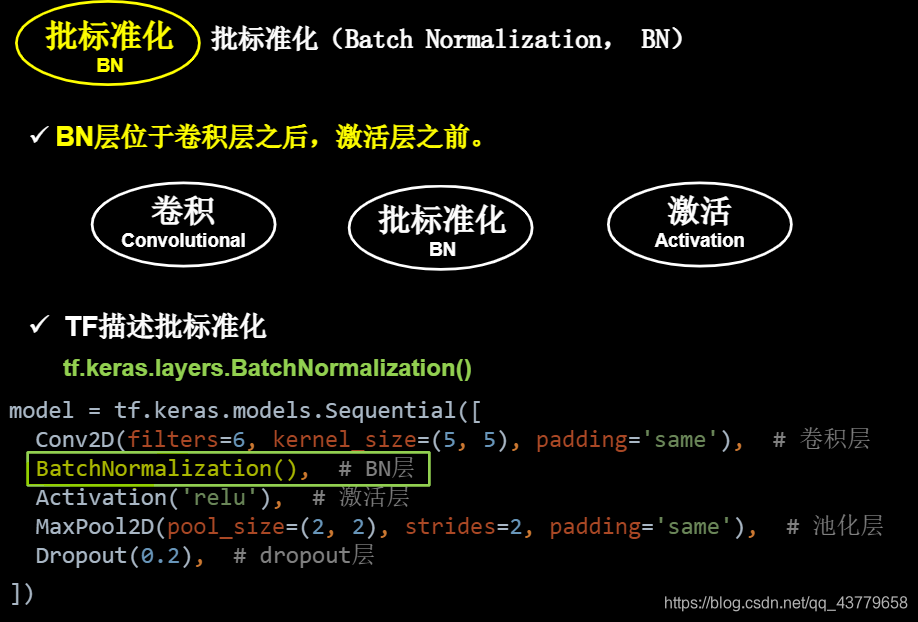
重点:
- BN层位于卷积层后,激活层之前
- 网络层要使用到BN时,在tf.keras.layers.Conv2D函数中不写activation参数
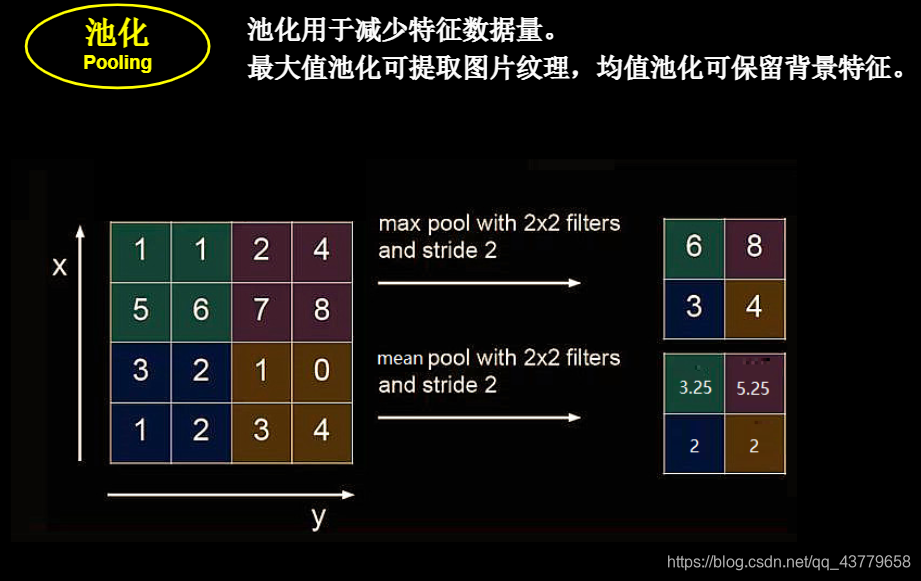
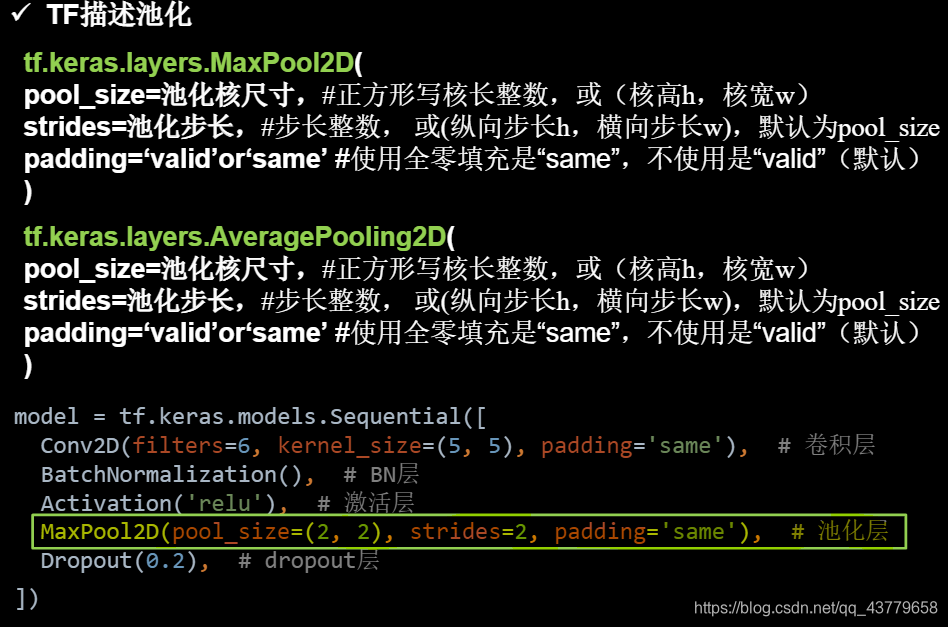
Pooling
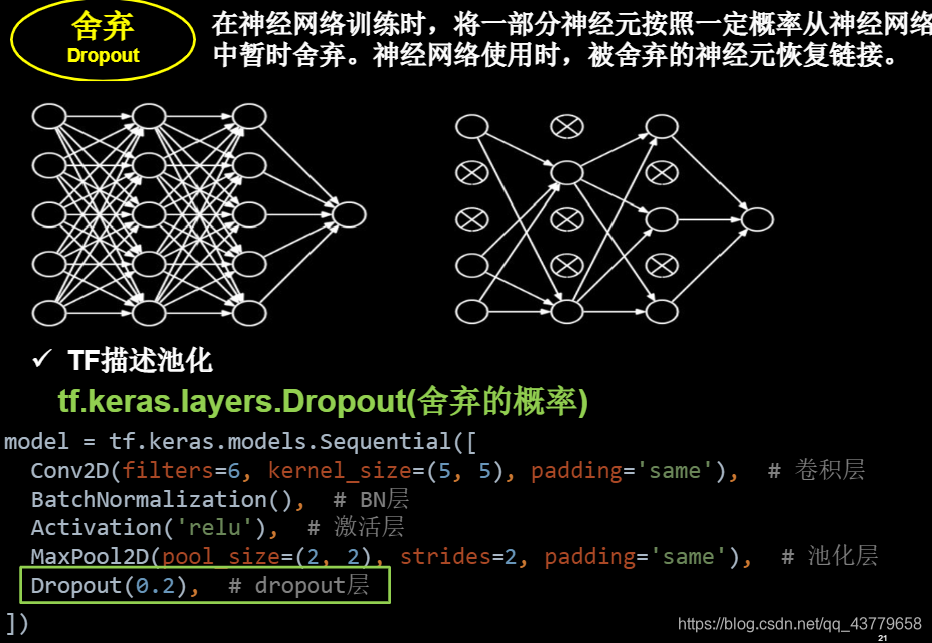
Dropout
代码实操 — CBAPD
数据是 cifar10数据集
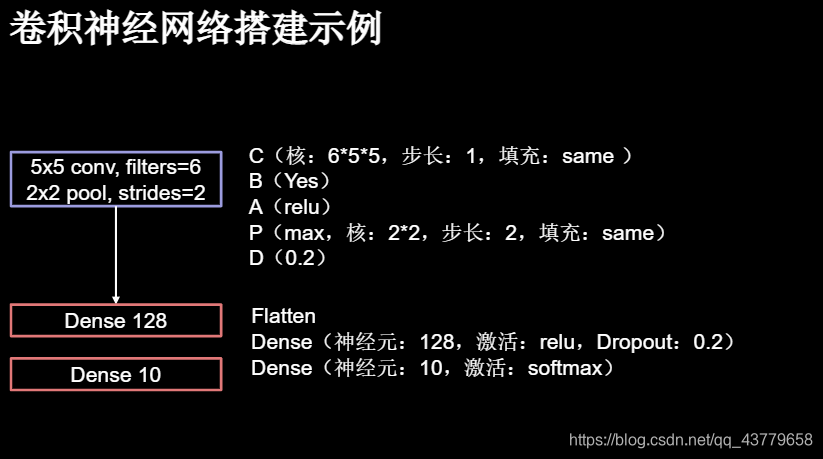
简单网络
model.compile
model.compile()方法用于在配置训练方法时,告知训练时用的优化器、损失函数和准确率评测标准
model.compile(optimizer = 优化器,
loss = 损失函数,
metrics = ["准确率”])
其中:
optimizer可以是字符串形式给出的优化器名字,也可以是函数形式,使用函数形式可以设置学习率、动量和超参数
例如:“sgd” 或者 tf.optimizers.SGD(lr = 学习率,
decay = 学习率衰减率,
momentum = 动量参数)
“adagrad" 或者 tf.keras.optimizers.Adagrad(lr = 学习率,
decay = 学习率衰减率)
”adadelta" 或者 tf.keras.optimizers.Adadelta(lr = 学习率,
decay = 学习率衰减率)
“adam" 或者 tf.keras.optimizers.Adam(lr = 学习率,
decay = 学习率衰减率)
loss可以是字符串形式给出的损失函数的名字,也可以是函数形式
例如:
"mse" 或者 tf.keras.losses.MeanSquaredError()
"sparse_categorical_crossentropy" 或者 tf.keras.losses.SparseCatagoricalCrossentropy(from_logits = False)
损失函数经常需要使用softmax函数来将输出转化为概率分布的形式
在这里from_logits代表是否将输出转为概率分布的形式,为False时表示转换为概率分布,为True时表示不转换,直接输出
Metrics 标注网络评价指标
例如:
"accuracy" : y_ 和 y 都是数值,如y_ = [1] y = [1] #y_为真实值,y为预测值
“sparse_accuracy":y_和y都是以独热码 和概率分布表示,如y_ = [0, 1, 0], y = [0.256, 0.695, 0.048]
"sparse_categorical_accuracy" :y_是以数值形式给出,y是以 独热码给出,如y_ = [1], y = [0.256 0.695, 0.048]
断点续训
keras.callbacks.ModelCheckpoint(filepath,
monitor='val_loss',
verbose=0,
save_best_only=False,
save_weights_only=False,
mode='auto',
period=1)
# 执行模型训练过程
history = model.fit(x_train, y_train, batch_size=32, epochs=5, validation_data=(x_test, y_test), validation_freq=1,
callbacks=[cp_callback]) # 在model.fit添加callbacks=[checkpoint]实现回调
- 参数:
filename:字符串,保存模型的路径,filepath可以是格式化的字符串,里面的占位符将会被epoch值和传入on_epoch_end的logs关键字所填入。
例如:
filepath = “weights_{epoch:03d}-{val_loss:.4f}.h5”
则会生成对应epoch和验证集loss的多个文件。
monitor:需要监视的值,通常为:val_acc 或 val_loss 或 acc 或 loss
verbose:信息展示模式,0或1。为1表示输出epoch模型保存信息,默认为0表示不输出该信息,信息形如:
Epoch 00001: val_acc improved from -inf to 0.49240, saving model to /xxx/checkpoint/model_001-0.3902.h5
save_best_only:当设置为True时,将只保存在验证集上性能最好的模型
mode:‘auto’,‘min’,‘max’之一,在save_best_only=True时决定性能最佳模型的评判准则
例如,当监测值为val_acc时,模式应为max,当检测值为val_loss时,模式应为min。在auto模式下,评价准则由被监测值的名字自动推断。
save_weights_only:若设置为True,则只保存模型权重,否则将保存整个模型(包括模型结构,配置信息等)
period:CheckPoint之间的间隔的epoch数
import tensorflow as tf
import os
import numpy as np
from matplotlib import pyplot as plt
from tensorflow.keras.layers import Conv2D, BatchNormalization, Activation, MaxPool2D, Dropout, Flatten, Dense
from tensorflow.keras import Model
# 为了将输出的内容全部打印出来
np.set_printoptions(threshold=np.inf)
# 加载数据集并对数据集进行处理
cifar10 = tf.keras.datasets.cifar10
(x_train, y_train), (x_test, y_test) = cifar10.load_data()
x_train, x_test = x_train / 255.0, x_test / 255.0
# 构建模型
class Baseline(Model):
def __init__(self):
super(Baseline, self).__init__()
self.c1 = Conv2D(filters=6, kernel_size=(5, 5), padding='same') # 卷积层
self.b1 = BatchNormalization() # BN层
self.a1 = Activation('relu') # 激活层
self.p1 = MaxPool2D(pool_size=(2, 2), strides=2, padding='same') # 池化层
self.d1 = Dropout(0.2) # dropout层
self.flatten = Flatten()
self.f1 = Dense(128, activation='relu')
self.d2 = Dropout(0.2)
self.f2 = Dense(10, activation='softmax')
def call(self, x):
x = self.c1(x)
x = self.b1(x)
x = self.a1(x)
x = self.p1(x)
x = self.d1(x)
x = self.flatten(x)
x = self.f1(x)
x = self.d2(x)
y = self.f2(x)
return y
model = Baseline()
model.compile(optimizer='adam',
loss=tf.keras.losses.SparseCategoricalCrossentropy(from_logits=False),
metrics=['sparse_categorical_accuracy'])
# 加载模型
checkpoint_save_path = "./checkpoint/Baseline.ckpt"
if os.path.exists(checkpoint_save_path + '.index'):
print('-------------load the model-----------------')
model.load_weights(checkpoint_save_path)
cp_callback = tf.keras.callbacks.ModelCheckpoint(filepath=checkpoint_save_path,
save_weights_only=True,
save_best_only=True)
# 执行模型训练过程
history = model.fit(x_train, y_train, batch_size=32, epochs=5, validation_data=(x_test, y_test), validation_freq=1,
callbacks=[cp_callback]) # 在model.fit添加callbacks=[checkpoint]实现回调
model.summary()
# print(model.trainable_variables)
# 保存各个训练参数
file = open('./weights.txt', 'w')
for v in model.trainable_variables:
file.write(str(v.name) + '\n')
file.write(str(v.shape) + '\n')
file.write(str(v.numpy()) + '\n')
file.close()
############################################### show ###############################################
# 显示训练集和验证集的acc和loss曲线
acc = history.history['sparse_categorical_accuracy']
val_acc = history.history['val_sparse_categorical_accuracy']
loss = history.history['loss']
val_loss = history.history['val_loss']
plt.subplot(1, 2, 1)
plt.plot(acc, label='Training Accuracy')
plt.plot(val_acc, label='Validation Accuracy')
plt.title('Training and Validation Accuracy')
plt.legend()
plt.subplot(1, 2, 2)
plt.plot(loss, label='Training Loss')
plt.plot(val_loss, label='Validation Loss')
plt.title('Training and Validation Loss')
plt.legend()
plt.show()
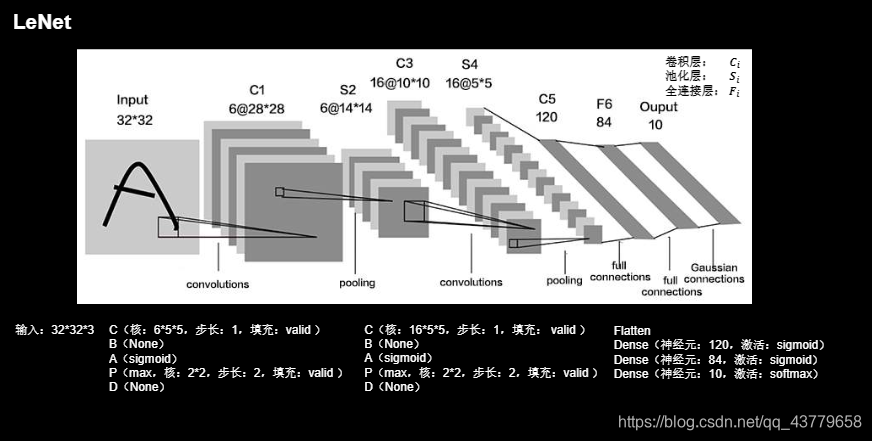
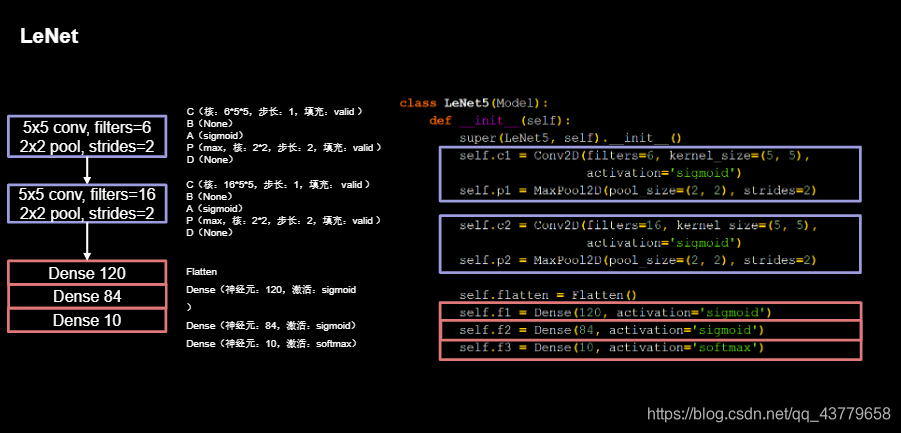
LeNet
class LeNet5(Model):
def __init__(self):
super(LeNet5, self).__init__()
self.c1 = Conv2D(filters=6, kernel_size=(5, 5),
activation='sigmoid') # 没有BN层,所以可以在这里直接写激活函数
self.p1 = MaxPool2D(pool_size=(2, 2), strides=2)
self.c2 = Conv2D(filters=16, kernel_size=(5, 5),
activation='sigmoid')
self.p2 = MaxPool2D(pool_size=(2, 2), strides=2)
self.flatten = Flatten()
self.f1 = Dense(120, activation='sigmoid')
self.f2 = Dense(84, activation='sigmoid')
self.f3 = Dense(10, activation='softmax')
def call(self, x):
x = self.c1(x)
x = self.p1(x)
x = self.c2(x)
x = self.p2(x)
x = self.flatten(x)
x = self.f1(x)
x = self.f2(x)
y = self.f3(x)
return y
AlexNet
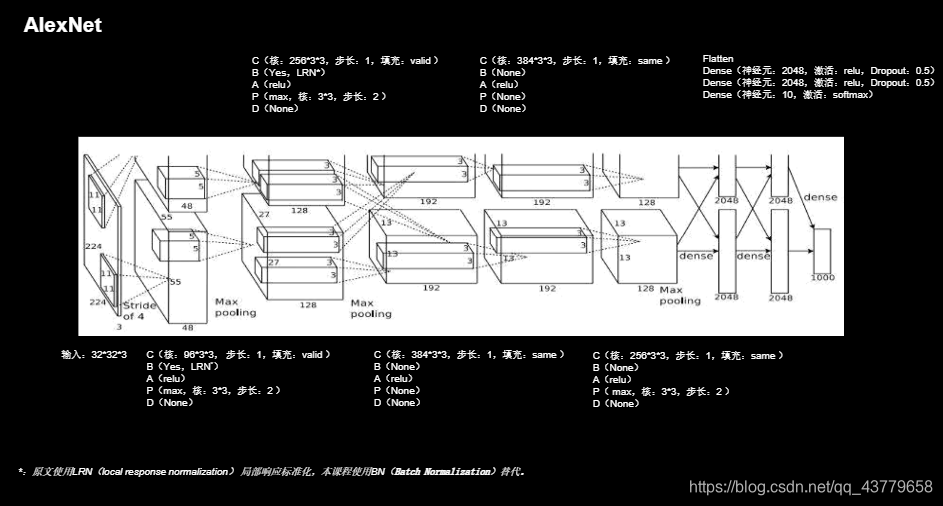
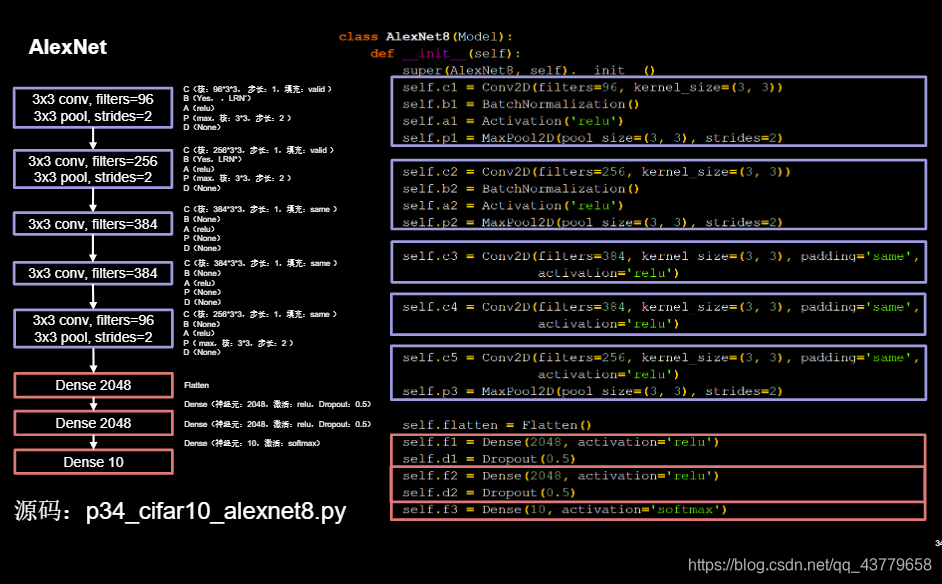
class AlexNet8(Model):
def __init__(self):
super(AlexNet8, self).__init__()
self.c1 = Conv2D(filters=96, kernel_size=(3, 3))
self.b1 = BatchNormalization()
self.a1 = Activation('relu')
self.p1 = MaxPool2D(pool_size=(3, 3), strides=2)
self.c2 = Conv2D(filters=256, kernel_size=(3, 3))
self.b2 = BatchNormalization()
self.a2 = Activation('relu')
self.p2 = MaxPool2D(pool_size=(3, 3), strides=2)
self.c3 = Conv2D(filters=384, kernel_size=(3, 3), padding='same',
activation='relu')
self.c4 = Conv2D(filters=384, kernel_size=(3, 3), padding='same',
activation='relu')
self.c5 = Conv2D(filters=256, kernel_size=(3, 3), padding='same',
activation='relu')
self.p3 = MaxPool2D(pool_size=(3, 3), strides=2)
self.flatten = Flatten()
self.f1 = Dense(2048, activation='relu')
self.d1 = Dropout(0.5)
self.f2 = Dense(2048, activation='relu')
self.d2 = Dropout(0.5)
self.f3 = Dense(10, activation='softmax')
def call(self, x):
x = self.c1(x)
x = self.b1(x)
x = self.a1(x)
x = self.p1(x)
x = self.c2(x)
x = self.b2(x)
x = self.a2(x)
x = self.p2(x)
x = self.c3(x)
x = self.c4(x)
x = self.c5(x)
x = self.p3(x)
x = self.flatten(x)
x = self.f1(x)
x = self.d1(x)
x = self.f2(x)
x = self.d2(x)
y = self.f3(x)
return y
model = AlexNet8()
VGGNet
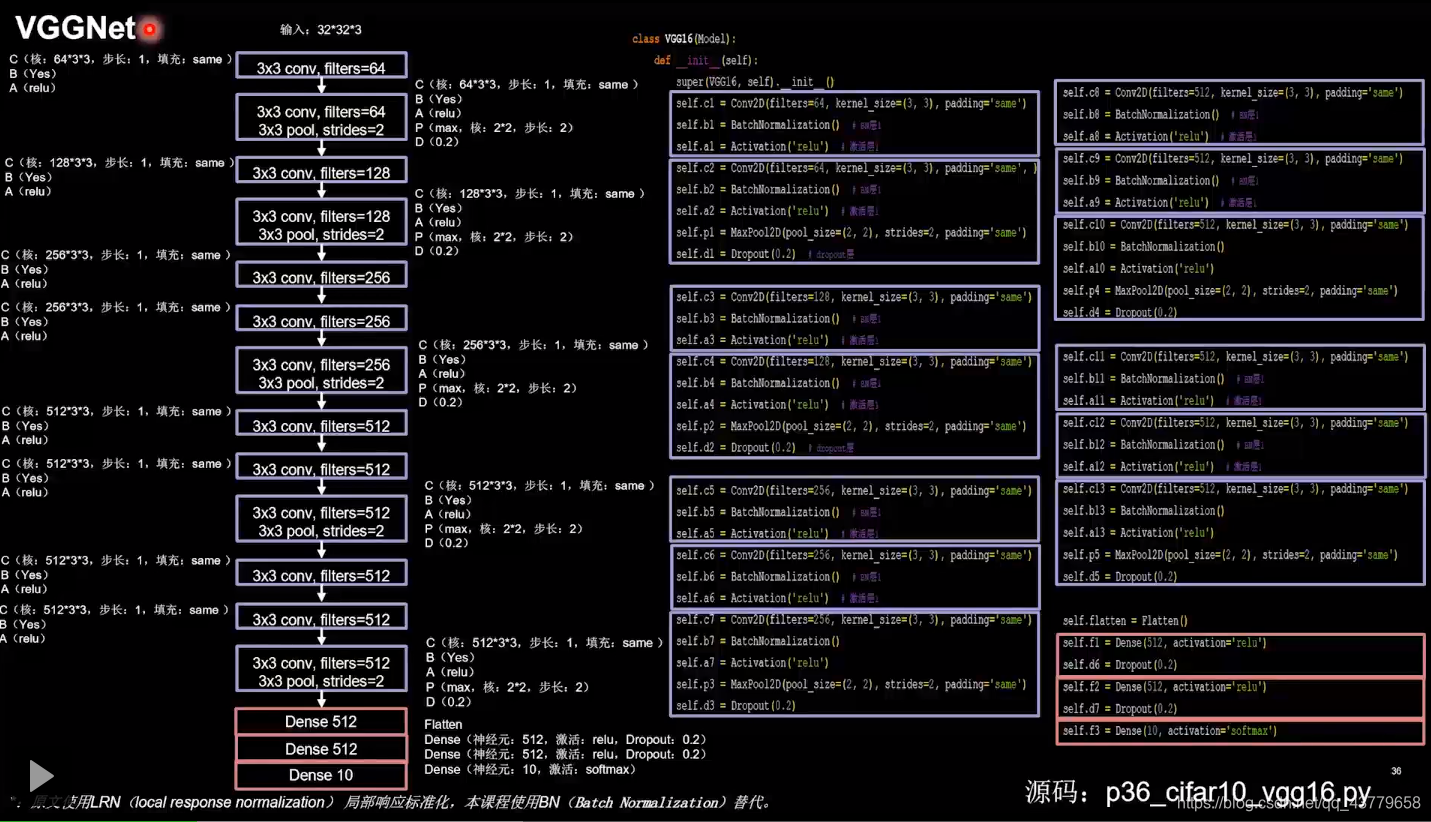
class VGG16(Model):
def __init__(self):
super(VGG16, self).__init__()
self.c1 = Conv2D(filters=64, kernel_size=(3, 3), padding='same') # 卷积层1
self.b1 = BatchNormalization() # BN层1
self.a1 = Activation('relu') # 激活层1
self.c2 = Conv2D(filters=64, kernel_size=(3, 3), padding='same', )
self.b2 = BatchNormalization() # BN层1
self.a2 = Activation('relu') # 激活层1
self.p1 = MaxPool2D(pool_size=(2, 2), strides=2, padding='same')
self.d1 = Dropout(0.2) # dropout层
self.c3 = Conv2D(filters=128, kernel_size=(3, 3), padding='same')
self.b3 = BatchNormalization() # BN层1
self.a3 = Activation('relu') # 激活层1
self.c4 = Conv2D(filters=128, kernel_size=(3, 3), padding='same')
self.b4 = BatchNormalization() # BN层1
self.a4 = Activation('relu') # 激活层1
self.p2 = MaxPool2D(pool_size=(2, 2), strides=2, padding='same')
self.d2 = Dropout(0.2) # dropout层
self.c5 = Conv2D(filters=256, kernel_size=(3, 3), padding='same')
self.b5 = BatchNormalization() # BN层1
self.a5 = Activation('relu') # 激活层1
self.c6 = Conv2D(filters=256, kernel_size=(3, 3), padding='same')
self.b6 = BatchNormalization() # BN层1
self.a6 = Activation('relu') # 激活层1
self.c7 = Conv2D(filters=256, kernel_size=(3, 3), padding='same')
self.b7 = BatchNormalization()
self.a7 = Activation('relu')
self.p3 = MaxPool2D(pool_size=(2, 2), strides=2, padding='same')
self.d3 = Dropout(0.2)
self.c8 = Conv2D(filters=512, kernel_size=(3, 3), padding='same')
self.b8 = BatchNormalization() # BN层1
self.a8 = Activation('relu') # 激活层1
self.c9 = Conv2D(filters=512, kernel_size=(3, 3), padding='same')
self.b9 = BatchNormalization() # BN层1
self.a9 = Activation('relu') # 激活层1
self.c10 = Conv2D(filters=512, kernel_size=(3, 3), padding='same')
self.b10 = BatchNormalization()
self.a10 = Activation('relu')
self.p4 = MaxPool2D(pool_size=(2, 2), strides=2, padding='same')
self.d4 = Dropout(0.2)
self.c11 = Conv2D(filters=512, kernel_size=(3, 3), padding='same')
self.b11 = BatchNormalization() # BN层1
self.a11 = Activation('relu') # 激活层1
self.c12 = Conv2D(filters=512, kernel_size=(3, 3), padding='same')
self.b12 = BatchNormalization() # BN层1
self.a12 = Activation('relu') # 激活层1
self.c13 = Conv2D(filters=512, kernel_size=(3, 3), padding='same')
self.b13 = BatchNormalization()
self.a13 = Activation('relu')
self.p5 = MaxPool2D(pool_size=(2, 2), strides=2, padding='same')
self.d5 = Dropout(0.2)
self.flatten = Flatten()
self.f1 = Dense(512, activation='relu')
self.d6 = Dropout(0.2)
self.f2 = Dense(512, activation='relu')
self.d7 = Dropout(0.2)
self.f3 = Dense(10, activation='softmax')
def call(self, x):
x = self.c1(x)
x = self.b1(x)
x = self.a1(x)
x = self.c2(x)
x = self.b2(x)
x = self.a2(x)
x = self.p1(x)
x = self.d1(x)
x = self.c3(x)
x = self.b3(x)
x = self.a3(x)
x = self.c4(x)
x = self.b4(x)
x = self.a4(x)
x = self.p2(x)
x = self.d2(x)
x = self.c5(x)
x = self.b5(x)
x = self.a5(x)
x = self.c6(x)
x = self.b6(x)
x = self.a6(x)
x = self.c7(x)
x = self.b7(x)
x = self.a7(x)
x = self.p3(x)
x = self.d3(x)
x = self.c8(x)
x = self.b8(x)
x = self.a8(x)
x = self.c9(x)
x = self.b9(x)
x = self.a9(x)
x = self.c10(x)
x = self.b10(x)
x = self.a10(x)
x = self.p4(x)
x = self.d4(x)
x = self.c11(x)
x = self.b11(x)
x = self.a11(x)
x = self.c12(x)
x = self.b12(x)
x = self.a12(x)
x = self.c13(x)
x = self.b13(x)
x = self.a13(x)
x = self.p5(x)
x = self.d5(x)
x = self.flatten(x)
x = self.f1(x)
x = self.d6(x)
x = self.f2(x)
x = self.d7(x)
y = self.f3(x)
return y
model = VGG16()
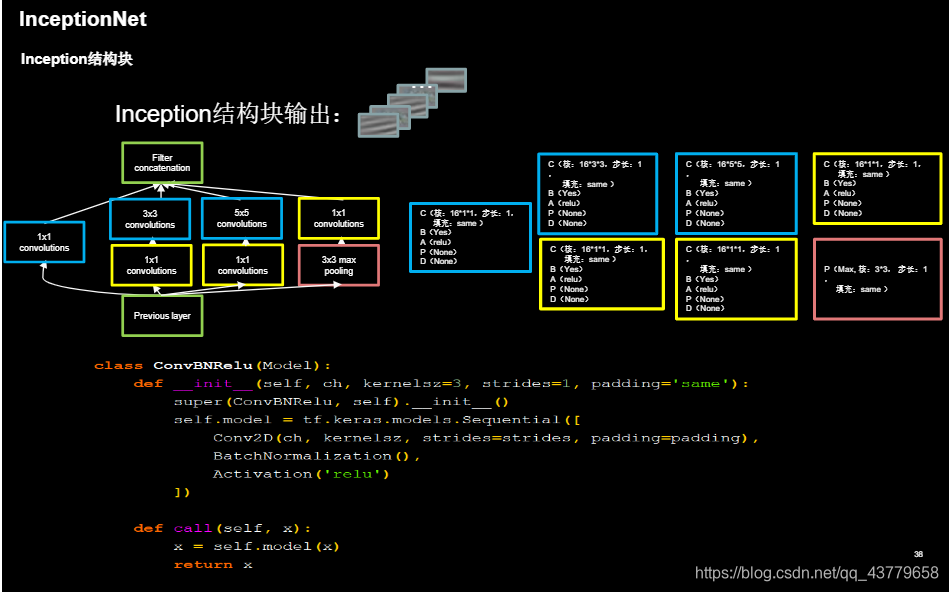
InceptionNet
ConvBNRelu
InceptionBlk
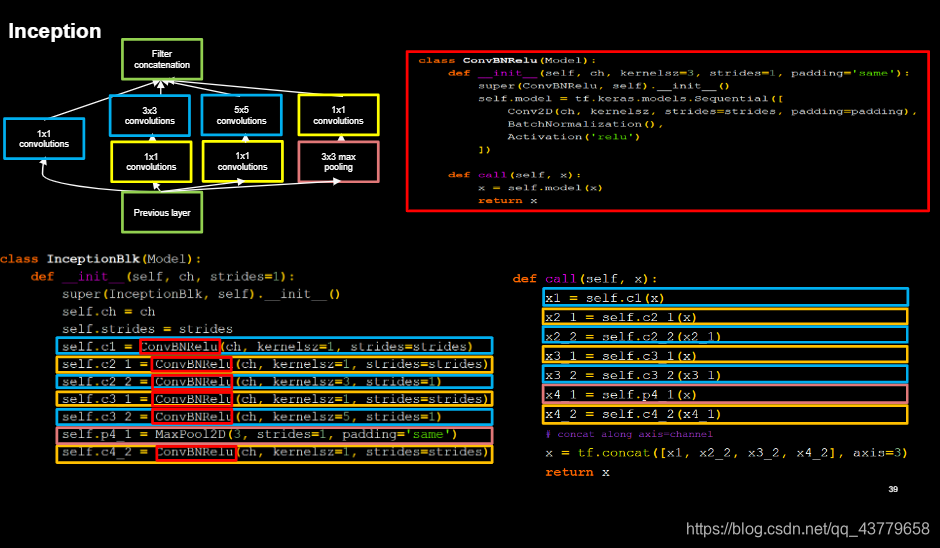
先定义了一个类ConvBNRelu,以便于之后方便的对模型构造
网络最后一层,将4个输入进行维度上的叠加(像千层蛋糕一样)
Inception10
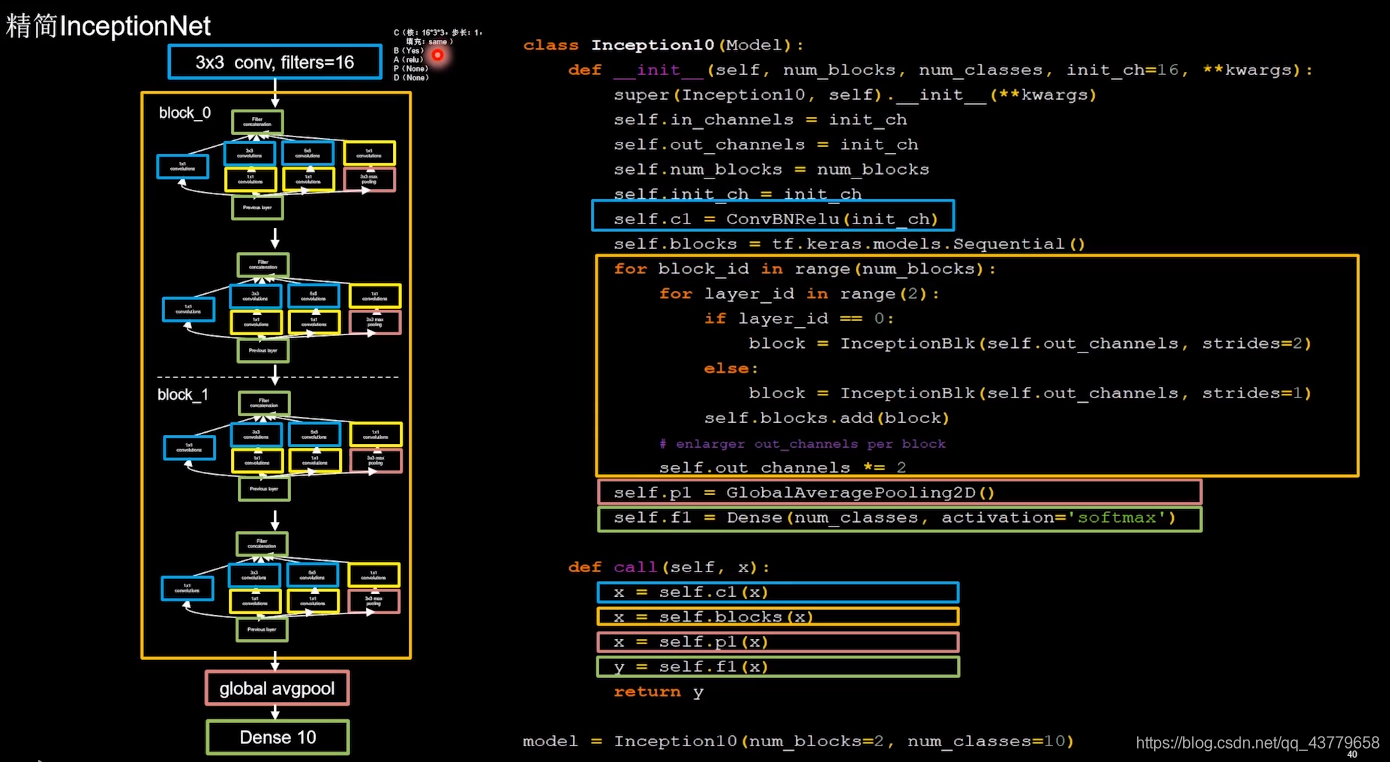
每两个Inception块组成一个block
每个block中的第一个Inception块卷积步长为2,第二个卷积步长为1
经过第一个Inception块后输出特征减半,所以将输出特征的深度加深,保存特征抽取中信息承载量一致
class ConvBNRelu(Model):
def __init__(self, ch, kernelsz=3, strides=1, padding='same'):
super(ConvBNRelu, self).__init__()
self.model = tf.keras.models.Sequential([
Conv2D(ch, kernelsz, strides=strides, padding=padding),
BatchNormalization(),
Activation('relu')
])
def call(self, x):
x = self.model(x, training=False)
#training=False时,BN通过整个训练集计算均值、方差去做批归一化
#training=True时,通过当前batch的均值、方差去做批归一化。推理时 training=False效果好
return x
class InceptionBlk(Model):
def __init__(self, ch, strides=1):
super(InceptionBlk, self).__init__()
self.ch = ch
self.strides = strides
self.c1 = ConvBNRelu(ch, kernelsz=1, strides=strides)
self.c2_1 = ConvBNRelu(ch, kernelsz=1, strides=strides)
self.c2_2 = ConvBNRelu(ch, kernelsz=3, strides=1)
self.c3_1 = ConvBNRelu(ch, kernelsz=1, strides=strides)
self.c3_2 = ConvBNRelu(ch, kernelsz=5, strides=1)
self.p4_1 = MaxPool2D(3, strides=1, padding='same')
self.c4_2 = ConvBNRelu(ch, kernelsz=1, strides=strides)
def call(self, x):
x1 = self.c1(x)
x2_1 = self.c2_1(x)
x2_2 = self.c2_2(x2_1)
x3_1 = self.c3_1(x)
x3_2 = self.c3_2(x3_1)
x4_1 = self.p4_1(x)
x4_2 = self.c4_2(x4_1)
# concat along axis=channel
x = tf.concat([x1, x2_2, x3_2, x4_2], axis=3)
return x
class Inception10(Model):
def __init__(self, num_blocks, num_classes, init_ch=16, **kwargs):
super(Inception10, self).__init__(**kwargs)
self.in_channels = init_ch
self.out_channels = init_ch
self.num_blocks = num_blocks
self.init_ch = init_ch
self.c1 = ConvBNRelu(init_ch)
self.blocks = tf.keras.models.Sequential()
for block_id in range(num_blocks):
for layer_id in range(2):
if layer_id == 0:
block = InceptionBlk(self.out_channels, strides=2)
else:
block = InceptionBlk(self.out_channels, strides=1)
self.blocks.add(block)
# enlarger out_channels per block
self.out_channels *= 2
self.p1 = GlobalAveragePooling2D()
self.f1 = Dense(num_classes, activation='softmax')
def call(self, x):
x = self.c1(x)
x = self.blocks(x)
x = self.p1(x)
y = self.f1(x)
return y
model = Inception10(num_blocks=2, num_classes=10)
ResNet
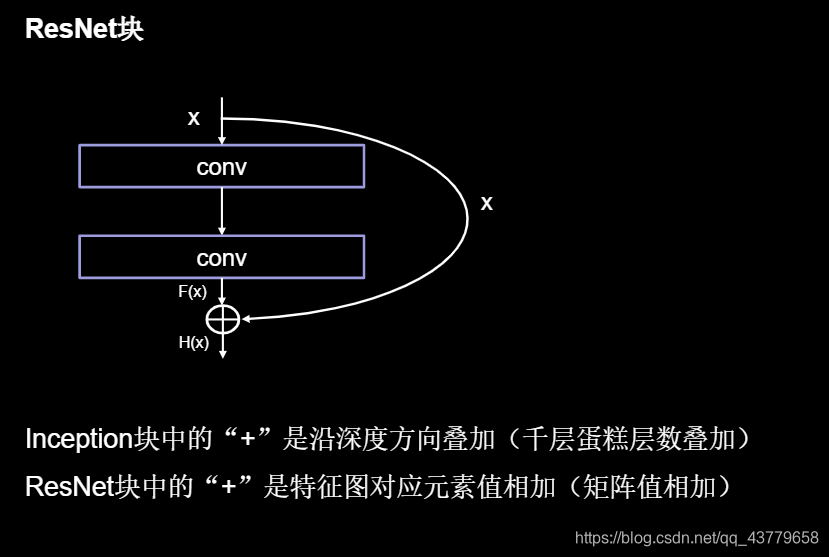
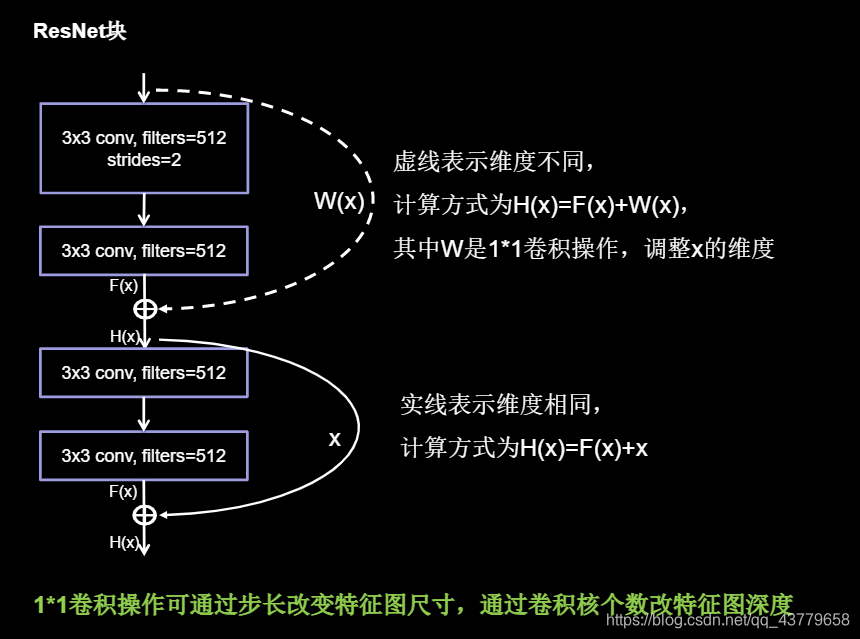
ResnetBlock
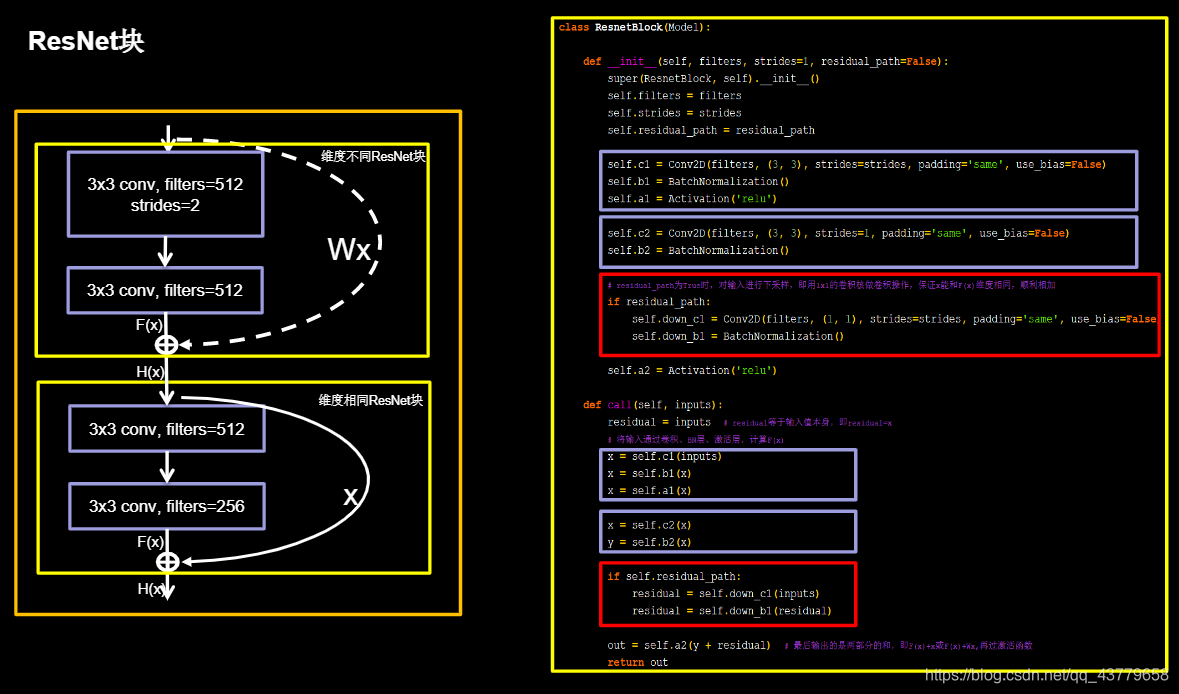
以上ResnetBlock代码表示上图模型中一个黄色的块(即一次实线或虚线的跳连)
当输入与输出维度相同时,self.residual_path = False
当维度不同时,需要进行对输入的下采样来保持维度相同self.down_c1 = Conv2D(filters, (1, 1), strides=strides, padding='same', use_bias=False) self.down_b1 = BatchNormalization()
ResNet18

第一个橙色块是两个实现跳连的ResNet块,所以要代码中体现
使用for循环并调用ResnetBlock 来构建模型
代码中的参数residual_path来表示是否是实线跳连
class ResnetBlock(Model):
def __init__(self, filters, strides=1, residual_path=False):
super(ResnetBlock, self).__init__()
self.filters = filters
self.strides = strides
self.residual_path = residual_path
self.c1 = Conv2D(filters, (3, 3), strides=strides, padding='same', use_bias=False)
self.b1 = BatchNormalization()
self.a1 = Activation('relu')
self.c2 = Conv2D(filters, (3, 3), strides=1, padding='same', use_bias=False)
self.b2 = BatchNormalization()
# residual_path为True时,对输入进行下采样,即用1x1的卷积核做卷积操作,保证x能和F(x)维度相同,顺利相加
if residual_path:
self.down_c1 = Conv2D(filters, (1, 1), strides=strides, padding='same', use_bias=False)
self.down_b1 = BatchNormalization()
self.a2 = Activation('relu')
def call(self, inputs):
residual = inputs # residual等于输入值本身,即residual=x
# 将输入通过卷积、BN层、激活层,计算F(x)
x = self.c1(inputs)
x = self.b1(x)
x = self.a1(x)
x = self.c2(x)
y = self.b2(x)
if self.residual_path:
residual = self.down_c1(inputs)
residual = self.down_b1(residual)
out = self.a2(y + residual) # 最后输出的是两部分的和,即F(x)+x或F(x)+Wx,再过激活函数
return out
class ResNet18(Model):
def __init__(self, block_list, initial_filters=64): # block_list表示每个block有几个卷积层
super(ResNet18, self).__init__()
self.num_blocks = len(block_list) # 共有几个block
self.block_list = block_list
self.out_filters = initial_filters
self.c1 = Conv2D(self.out_filters, (3, 3), strides=1, padding='same', use_bias=False)
self.b1 = BatchNormalization()
self.a1 = Activation('relu')
self.blocks = tf.keras.models.Sequential()
# 构建ResNet网络结构
for block_id in range(len(block_list)): # 第几个resnet block
for layer_id in range(block_list[block_id]): # 第几个卷积层
if block_id != 0 and layer_id == 0: # 对除第一个block以外的每个block的输入进行下采样
block = ResnetBlock(self.out_filters, strides=2, residual_path=True) # 虚线跳连
else:
block = ResnetBlock(self.out_filters, residual_path=False) # 实线跳连
self.blocks.add(block) # 将构建好的block加入resnet
self.out_filters *= 2 # 下一个block的卷积核数是上一个block的2倍
self.p1 = tf.keras.layers.GlobalAveragePooling2D()
self.f1 = tf.keras.layers.Dense(10, activation='softmax', kernel_regularizer=tf.keras.regularizers.l2())
def call(self, inputs):
x = self.c1(inputs)
x = self.b1(x)
x = self.a1(x)
x = self.blocks(x)
x = self.p1(x)
y = self.f1(x)
return y
model = ResNet18([2, 2, 2, 2])