准备工作
本机系统20.04
- ROS2-foxy
- ROS1-noetic
两个版本的ROS 均需要按照官网教程进行安装,安装完成以后,source环境变量都不放到~/.bashrc文件里面
通信包安装
在ros2中安装
sudo apt install ros-foxy-ros1-bridge
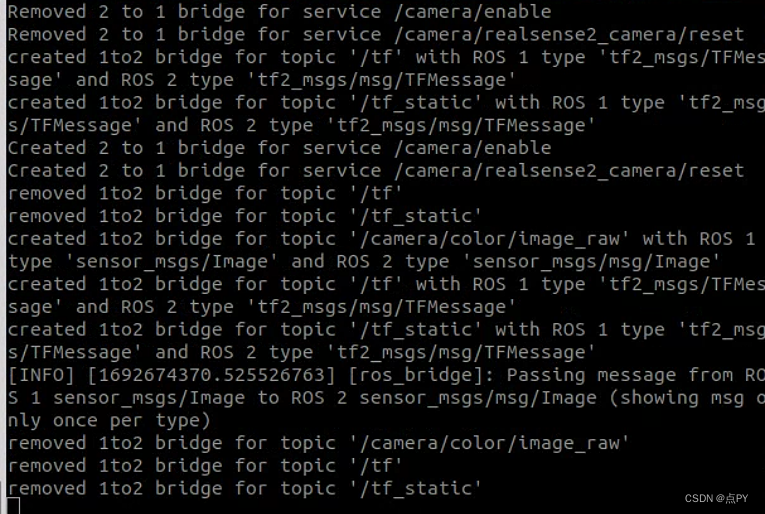
启动ros1_bridge
新开一个终端
source /opt/ros/noetic/setup.bash
source /opt/ros/foxy/setup.bash
ros2 run ros1_bridge dynamic_bridge
在ROS1中启动相机节点
source /opt/ros/noetic/setup.bash
roslaunch realsense2_camera rs_camera.launch
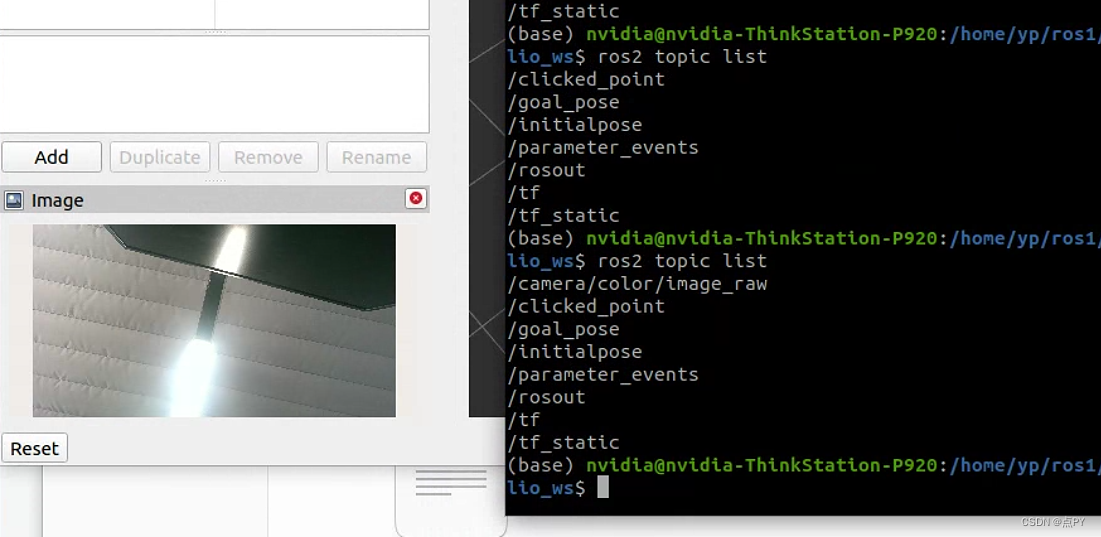
在ROS2中查看ROS1话题
新开一个终端
source /opt/ros/foxy/setup.bash
ros2 run rviz2 rviz2