突然发现自己被旋转矩阵的左乘右乘给搞糊涂了,查了不少博客还是有点晕,这里自己总结一下:
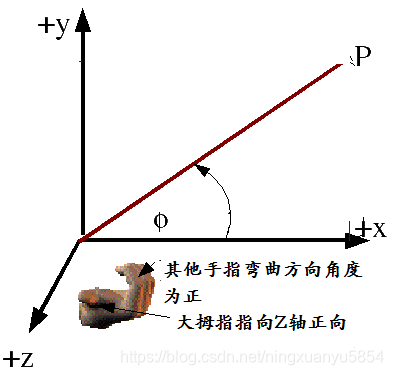
本文所讨论均是基于右手坐标系,旋转也是以正方向旋转,如图所示:
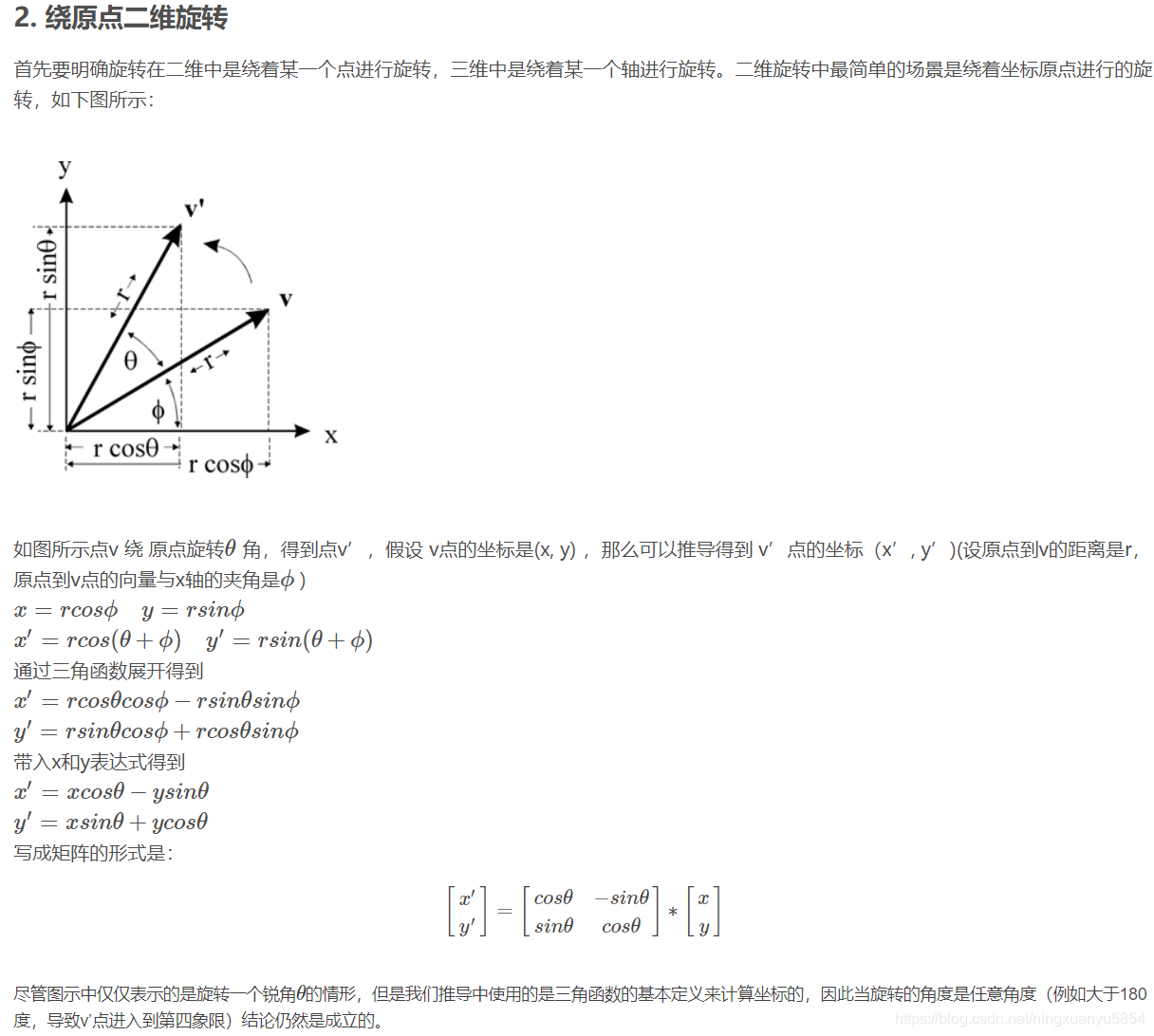
左乘: 坐标系不动,点动,则左乘。【若绕静坐标系(世界坐标系)旋转,则左乘,也是变换矩阵乘坐标矩阵;】
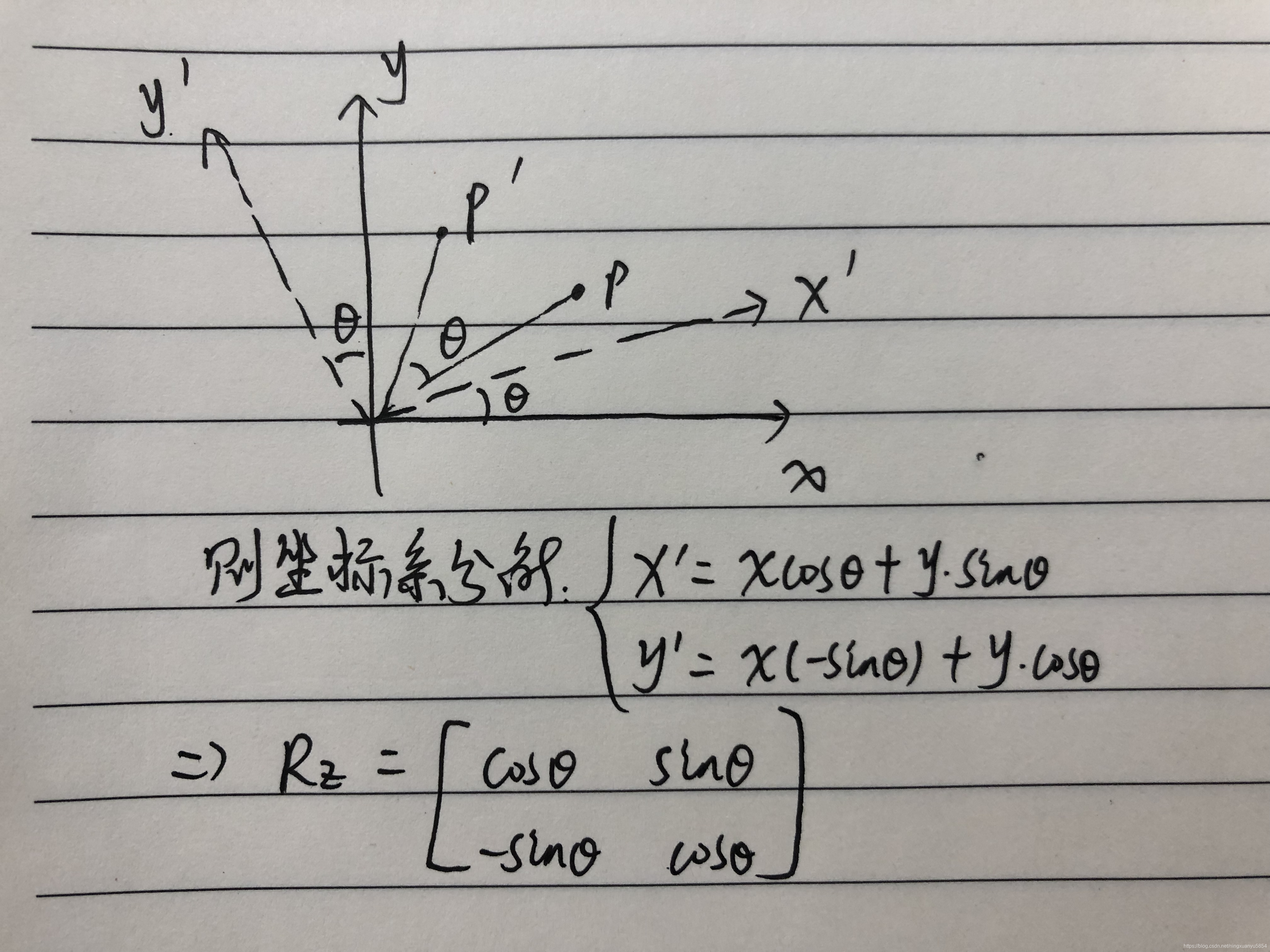
右乘: 点不动,坐标系动,则右乘。【若是绕动坐标系旋转(自身建立一个坐标系),则右乘,也就是坐标矩阵乘变换矩阵】
由于三维旋转可以分解成分别绕三个轴旋转,然后其实就是二维旋转了。为了方便,这里就使用二维旋转举例。
比如绕z轴旋转 theta 角度;
左乘分析如图所示:
而右乘分析:
则是旋转坐标系;点逆时针旋转了theta角,其实也就是相当于坐标轴也逆时针旋转theta角。如图所示:
设点原坐标为 [ x , y , z ] [ x , y , z ] [ x , y , z ] [x,y,z][x,y,z] [x,y,z] [x,y,z][x,y,z][x,y,z]Rleft3(θ)∗Rleft2(θ)∗Rleft1(θ)∗⎣⎡xyz⎦⎤=Rright3(−θ)∗Rright2(−θ)∗Rright1(−θ)∗⎣⎡xyz⎦⎤
不过建议只是用一种方法来计算旋转矩阵,以免混淆。
【如有错误,欢迎各位批评指正。】
参考博客:https://blog.csdn.net/csxiaoshui/article/details/65446125