定角(Fixed angles)
围绕固定的坐标系转动。固定坐标系的原点,坐标系再围绕已经固定的轴转动,全程原坐标系不动。
注意!移动位置的顺序可以调换,但是旋转的顺序不能调换,结果不一样。
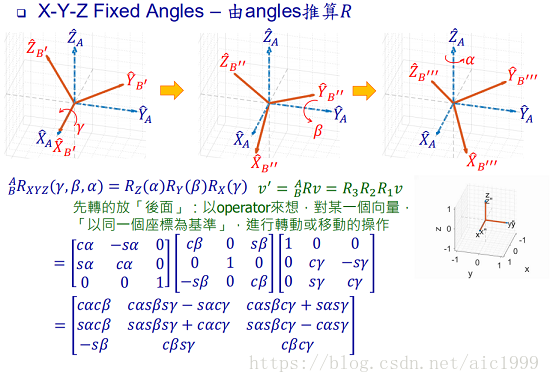
以X-Y-Z型为例子:即先围绕X轴进行转动γ°,然后围绕Y轴进行转动β°,最后围绕Z轴进行转动α°。注意逆时针为正方向。
X-Y-Z型公式:
重点:先转的轴的放后面运算,如下
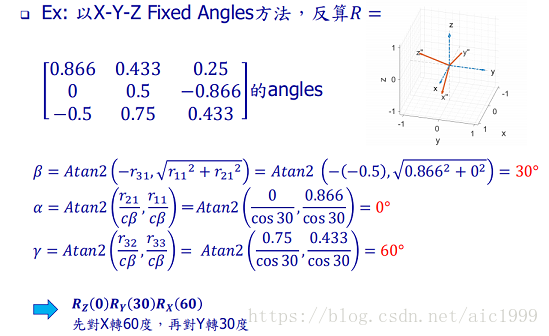
举例:
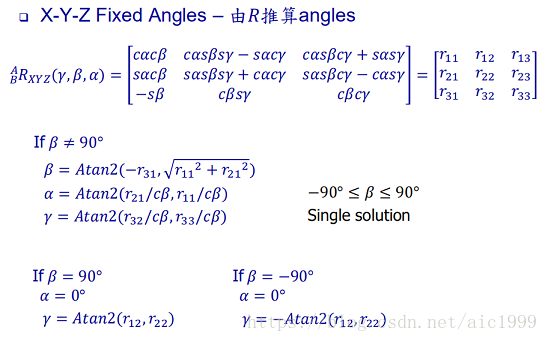
由角度推旋转矩阵

由旋转矩阵推角度
欧拉角(Euler angles)
“自旋转”,围绕当下(自己)的坐标系某轴转动,就是每次旋转,都固定被围绕的某一轴,另两轴动。
每次旋转,整个坐标系都会改变位置。
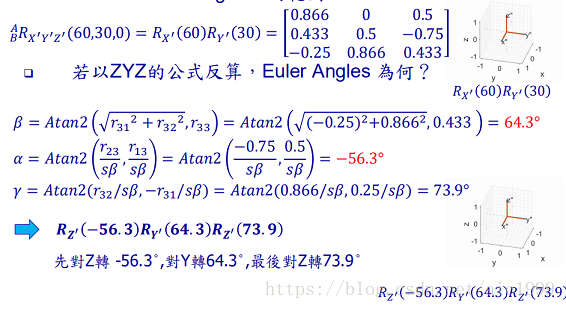
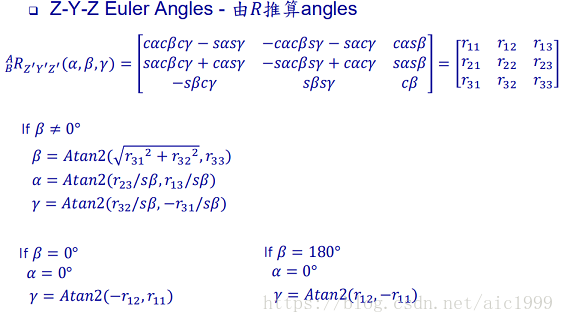
以Z-Y-Z型为例的公式:
重点:先转的轴的放前面运算,如下

举例:
矩阵转角度: