在研究双目之前我们需要先明白几个概念
1.坐标系变换(为了理解世界坐标系变化到相机坐标系)
坐标系变换涉及两种,一种平移,一种旋转……二郎觉得好复杂,到底啥是坐标系变换?空间中的一个点怎么对应到另一个空间呢?
坐标系其实就是一个辅助工具,我们空间中存在一个点,它就存在那里,有无坐标系它都不会消失,所以明确一点,坐标系只是度量的工具,它并不影响我们空间中存在的那个点。
所以,很多情况下,考虑坐标系变化时,你先画一个点,然后各种旋转平移那个坐标系骨架(三个轴串起来,感觉很像骨架),然后你只需一个个把点对应到坐标系上,而并不要逆过来为了迎合坐标系而移动点。
上面的很多人容易弄错,在想着坐标系变换时,在大脑里想的时候点也随着变换来回晃动,可以明确,点不动如山……
那么我们来讨论左边变换的平移和旋转,这两个哪个先做都无所谓,二郎更喜欢先旋转对齐,再平移回去。
旋转(一涉及旋转,觉得自己空间感不好的都一阵蒙圈,其实谁都不能x,y,z同时在那转,都是固定一个轴,转动其他两个轴。)
固定x轴,转y,z

那个红色的点是空间中的一个点,为啥我们坐标表换需要加一个空间点?
1.一般直接研究坐标的变换比较少,都是研究一个点在坐标1下的坐标为(x,y,z),那么在坐标2下的坐标为多少?(已知(x,y,z)和θ,求(x2,y2,z2))
2.通过空间点做为媒介,将两个坐标系联系起来,然后求取坐标系变换的过程。(已知(x,y,z)和(x2,y2,z2)求θ)。
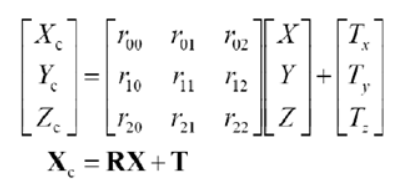
变换可以用以下公式表示
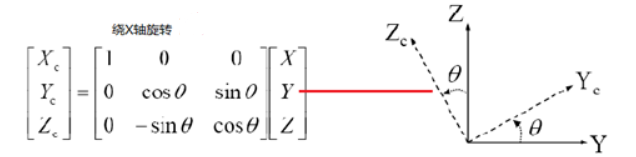
这个公式怎么来的呢?在应对矩阵时,我们不妨先转化为方程的形式
Xc = X
Yc = cosθ·Y+sinθ·Z
Zc = -sinθ·Y+cosθ·Z
可以看出绕X轴转,X轴是不发生变化的。那么,这种变化是怎么求得的呢?只需两步
对应

空间点对应在坐标系。
分解

可以看出这个分解和我们高中、初中学的力分解类似,涉及到空间点,包括力的分解在内,有一个技巧,所有的分解都满足欧式距离不变性
(a,b,c,d)(a1,b1,c1,d1)
a2+b2+c2+d2=(a1)2+(b1)2+(c1)2+(d1)2
这种方法可以检查我们结果的正确与否,同时这个也是高中老师没有提到的。

上面的这些都可以推导出来。
我们的坐标系变化有平移和旋转
旋转可以表示为
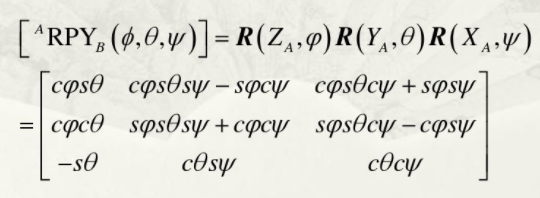
三坐标的旋转直接相乘,这里的乘有一个知识点,二郎需要提一下
左乘还是右乘
左乘——相对于固定坐标系进行变换,(固定坐标系—我们上面提到的固定x轴旋转……,这里的固定,其实我们已经暗暗地定义了一个坐标系,这个坐标系我们潜意识认为它是不变的,这也就是世界坐标系。除了平时我们假设了固定坐标系就是我们认识的世界坐标系,其他情况是我们需要将坐标系1变换到坐标系2,这时,我们的坐标系2可以设为该固定坐标系)
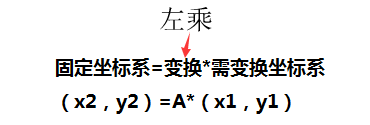
V’ = R * V = Rz * Ry * Rx V,变换顺序是先绕x转,再绕y转,最后绕z转。
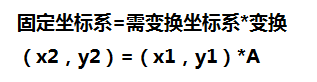
右乘——相对于自身坐标系进行变换,每变一次下一次需要以新坐标系为标准进行变换。比如第一次变换后,原x轴的位置变为y轴,那么下一次绕y轴的变换,就会绕之前的x轴变换。
平移+旋转


这两个图来自:https://wenku.baidu.com/view/12533c6d1611cc7931b765ce0508763231127408.html
看完例子,大家应该能看懂了。
还有就是为什么要用齐次坐标表示?
不加齐次之前
加了齐次之后

可以看出,齐次是为了把加项添加到变换矩阵中。
上面的都是基础知识,我们将世界坐标系变换到相机坐标系,采用左乘,将相机坐标系作为定坐标系。
主要记住一点,绝对位置肯定不会变,只是变坐标系。
这里还要写一点——为啥要把世界坐标系变到相机坐标系?因为我们相机坐标系可以将图像的世界点联系起来,啥是世界点?一般情况下我们是需要测量物体到机器人的距离和位置关系,因此世界坐标系一般定在机器人上,或者是机器人工作的场景中。
世界坐标系与相机坐标系的关系就是相机的外参——因此在用棋盘图进行求内参时外参是不确定的。
