一、什么是欧拉角
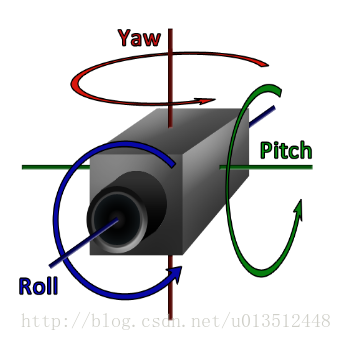
在3D 空间中,表示物体的旋转可以由三个欧拉角来表示:
pitch围绕X轴旋转,叫俯仰角。
yaw围绕Y轴旋转,叫偏航角。
roll围绕Z轴旋转,叫翻滚角。
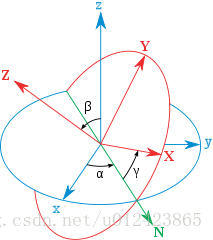
这三个角的顺序对旋转结果有影响。


此处得到结论:自旋转的“先转的放前面”
二、旋转矩阵转欧拉角
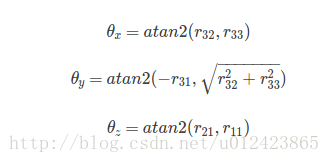
将旋转矩阵表示如下: 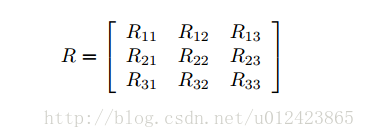
则可以如下表示欧拉角:
#include <opencv2/opencv.hpp>
#include <iostream>
#include <chrono>
#include <string.h>
using namespace std;
using namespace cv;
/**
* 功能: 1. 检查是否是旋转矩阵
**/
bool isRotationMatrix(Mat &R)
{
Mat Rt;
transpose(R, Rt);
Mat shouldBeIdentity = Rt * R;
Mat I = Mat::eye(3, 3, shouldBeIdentity.type());
return norm(I, shouldBeIdentity) < 1e-6;
}
/**
* 功能: 1. 通过给定的旋转矩阵计算对应的欧拉角
**/
Vec3f rotationMatrixToEulerAngles(Mat &R)
{
assert(isRotationMatrix(R));
float sy = sqrt(R.at<double>(0, 0) * R.at<double>(0, 0) + R.at<double>(1, 0) * R.at<double>(1, 0));
bool singular = sy < 1e-6; // If
float x, y, z;
if (!singular) {
x = atan2(R.at<double>(2, 1), R.at<double>(2, 2));
y = atan2(-R.at<double>(2, 0), sy);
z = atan2(R.at<double>(1, 0), R.at<double>(0, 0));
}
else {
x = atan2(-R.at<double>(1, 2), R.at<double>(1, 1));
y = atan2(-R.at<double>(2, 0), sy);
z = 0;
}
return Vec3f(x, y, z);
}
int main()
{
double k[9] = { 0.99979294,0.01240282,0.01613191, -0.0123678,0.99992094,-0.00226879,-0.01615878,0.0020688,0.9998673};
Mat km = Mat(3, 3, CV_64FC1, k);
cout << km<<endl;
bool kk = isRotationMatrix(km);
cout << kk << endl;
//cout << km.at<double>(0, 0) << endl;
Vec3f point=rotationMatrixToEulerAngles(km);
cout << point << endl;
return 0;
}
三、 欧拉角转旋转矩阵
如果将每一个角度用旋转矩阵表示如下: 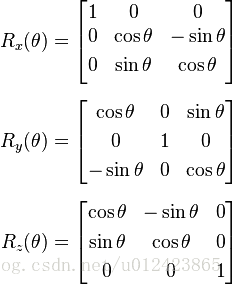
所以,容易得到,欧拉角转旋转矩阵如下:

/**
欧拉角计算对应的旋转矩阵
**/
Mat eulerAnglesToRotationMatrix(Vec3f &theta)
{
// 计算旋转矩阵的X分量
Mat R_x = (Mat_<double>(3,3) <<
1, 0, 0,
0, cos(theta[0]), -sin(theta[0]),
0, sin(theta[0]), cos(theta[0])
);
// 计算旋转矩阵的Y分量
Mat R_y = (Mat_<double>(3,3) <<
cos(theta[1]), 0, sin(theta[1]),
0, 1, 0,
-sin(theta[1]), 0, cos(theta[1])
);
// 计算旋转矩阵的Z分量
Mat R_z = (Mat_<double>(3,3) <<
cos(theta[2]), -sin(theta[2]), 0,
sin(theta[2]), cos(theta[2]), 0,
0, 0, 1);
// 合并
Mat R = R_z * R_y * R_x;
return R;
}四、四元数

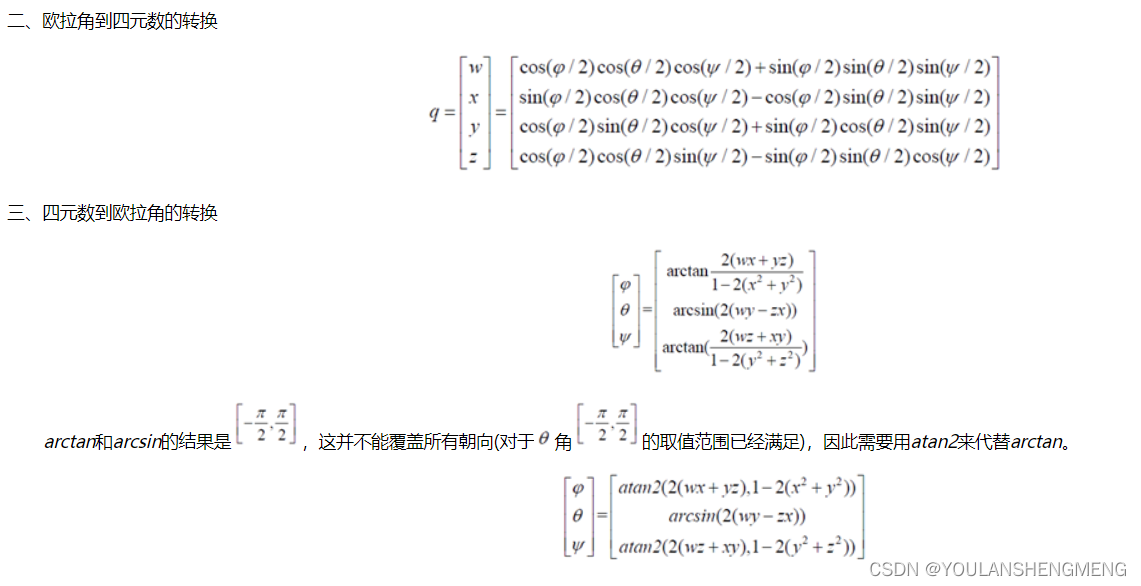
代码链接: http://www.cppblog.com/Files/heath/Euler2Quaternion.rar