机器学习之回归
基本数学原理
查看数据:
import numpy as np
import matplotlib.pyplot as plt
%matplotlib inline
# 读入训练数据
train = np.loadtxt('click.csv', delimiter=',', skiprows=1)
train_x = train[:, 0]
train_y = train[:, 1]
# 绘图
plt.plot(train_x, train_y, 'o')
plt.show()
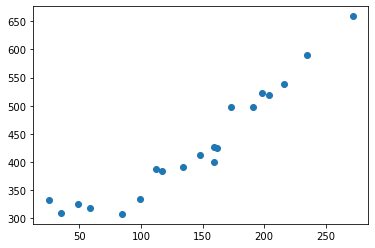
假设这是一个关于广告费与网站点击量的数据集,我们需要预测投入更多的广告费网站点击量是多少。
可以使用一条直线去拟合这个数据集:
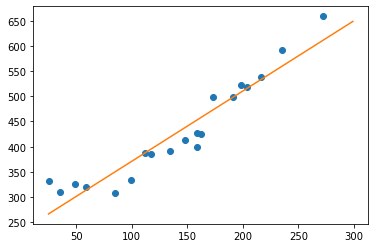
有了这条直线,我们就可以根据新的广告费投入去预测网站点击量。
可以使用下面的函数描述这条直线:
f θ ( x ) = θ 0 + θ 1 x f_{\theta}(x) = \theta_{0} + \theta_{1}x fθ(x)=θ0+θ1x
注意:在统计学领域,人们常常使用 θ 来表示未知数和推测值。采用 θ加数字下标的形式,是为了防止当未知数增加时,表达式中大量出现 a、b、c、d…这的符号。这样不但不易理解,还可能会出现符号本身不够用的情况。
我们的线性回归模型目标就是求解出 θ 0 \theta_{0} θ0和 θ 1 \theta_{1} θ1两个参数。
我们得到的模型会与原始样本存在一定的误差:
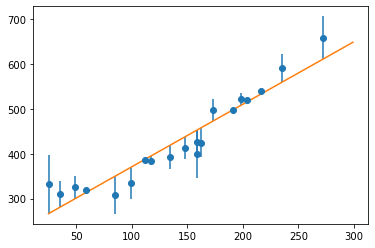
为了求解最近的θ,我们只要想办法降低样本与拟合直线的误差之和即可。描述误差之和的表达式称为目标函数E(θ),E 是 Error 的首字母:
E ( θ ) = 1 2 ∑ i = 1 n ( y ( i ) − f θ ( x ( i ) ) ) 2 E(\theta)=\frac{1}{2} \sum_{i=1}^{n}\left(y^{(i)}-f_{\theta}\left(x^{(i)}\right)\right)^{2} E(θ)=21i=1∑n(y(i)−fθ(x(i)))2
x ( i ) x^{(i)} x(i)和 y ( i ) y^{(i)} y(i)指第 i 个训练数据的某个维度的值。为了找到使 E(θ) 的值最小的 θ,这样的问题称为最优化问题。
计算误差之和使用 ∣ y − f θ ( x ) ∣ |y − f_θ(x)| ∣y−fθ(x)∣也没有错,但之后我们求解最优化问题,要对目标函数进行微分,比起绝对值,平方的微分更加简单。前面乘以1/2也和之后的微分有关系,是为了让作为结果的表达式变得简单。函数乘以正的常数,函数的形状就会被横向压扁或者纵向拉长,但函数本身取最小值的点是不变的。
为了得到最佳的θ,可以不停尝试修改参数 θ,使E(θ) 的值变得越来越小。
下面我们使用梯度下降法求解参数θ,原理:只要向与导数的符号相反的方向移动 θ, E(θ) 就会自然而然地沿着最小值的方向前进了。
对于只有一个参数x的函数g(x)有:
x : = x − η d d x g ( x ) x:=x-\eta \frac{\mathrm{d}}{\mathrm{d} x} g(x) x:=x−ηdxdg(x)
A := B 这种写法的意思是通过 B 来定义 A。
η 是称为学习率的正的常数,读作“伊塔”。根据学习率的大小,到达最小值的更新次数也会发生变化,即收敛速度不同。有时候甚至会出现完全无法收敛,一直发散的情况。
比如对于函数 g ( x ) = ( x − 1 ) 2 g(x) = (x − 1)^2 g(x)=(x−1)2:
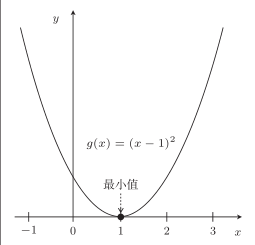
由 d d x g ( x ) = 2 x − 2 \frac{\mathrm{d}}{\mathrm{d} x} g(x)=2 x-2 dxdg(x)=2x−2知,g(x) 的微分是 2x − 2。
设η = 1 ,从 x = 3 开始,看看 x的变化:
x := 3 − 1(2 × 3 − 2) = 3 − 4 = −1
x := −1 − 1(2 × −1 − 2) = −1 + 4 = 3
x := 3 − 1(2 × 3 − 2) = 3 − 4 = −1
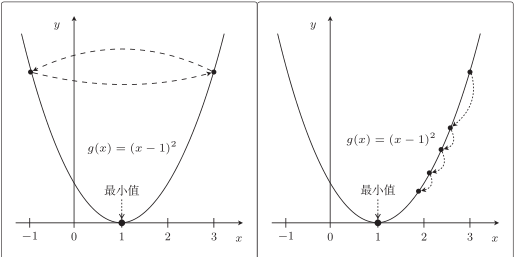
由于学习率η 过大,导致无法收敛,一直在 3 和 −1 上跳来跳去。
下面设 η = 0.1 ,同样从 x = 3 开始,再看看:
x := 3 − 0.1 × (2 × 3 − 2) = 3 − 0.4 = 2.6
x := 2.6 − 0.1 × (2 × 2.6 − 2) = 2.6 − 0.3 = 2.3
x := 2.3 − 0.1 × (2 × 2.3 − 2) = 2.3 − 0.2 = 2.1
x := 2.1 − 0.1 × (2 × 2.1 − 2) = 2.1 − 0.2 = 1.9
这次渐渐接近 x = 1 了,只是速度太慢,让人等的着急。如果 η 较大,那么 x := x − η(2x − 2) 会在两个值上跳来跳去,甚至有可能远离最小值。这就是发散状态。而当 η 较小时,移动量也变小,更新次数就会增加,但是值确实是会朝着收敛的方向而去:
而对于我们的目标函数:
E ( θ ) = 1 2 ∑ i = 1 n ( y ( i ) − f θ ( x ( i ) ) ) 2 E(\theta)=\frac{1}{2} \sum_{i=1}^{n}\left(y^{(i)}-f_{\theta}\left(x^{(i)}\right)\right)^{2} E(θ)=21i=1∑n(y(i)−fθ(x(i)))2
f θ ( x ) f_{\theta}(x) fθ(x)拥有 θ 0 \theta_{0} θ0和 θ 1 \theta_{1} θ1两个参数,这个目标函数是拥有两个参数的双变量函数,所以要用偏微分。更新表达式:
θ 0 : = θ 0 − η ∂ E ∂ θ 0 θ 1 : = θ 1 − η ∂ E ∂ θ 1 \begin{aligned} \theta_{0} &:=\theta_{0}-\eta \frac{\partial E}{\partial \theta_{0}} \\ \theta_{1} &:=\theta_{1}-\eta \frac{\partial E}{\partial \theta_{1}} \end{aligned} θ0θ1:=θ0−η∂θ0∂E:=θ1−η∂θ1∂E
E(θ) 中有 f θ ( x ) f_{\theta}(x) fθ(x),而 f θ ( x ) f_{\theta}(x) fθ(x)中又有 θ 0 \theta_{0} θ0可以使用复合函数的微分分别去考虑它们:
u = E ( θ ) v = f θ ( x ) u=E(\theta) \quad v=f_{\theta}(x) u=E(θ)v=fθ(x)
∂ u ∂ θ 0 = ∂ u ∂ v ⋅ ∂ v ∂ θ 0 \frac{\partial u}{\partial \theta_{0}}=\frac{\partial u}{\partial v} \cdot \frac{\partial v}{\partial \theta_{0}} ∂θ0∂u=∂v∂u⋅∂θ0∂v
先从 u 对 v 微分的地方开始计算:
∂ u ∂ v = ∂ ∂ v ( 1 2 ∑ i = 1 n ( y ( i ) − v ) 2 ) = 1 2 ∑ i = 1 n ( ∂ ∂ v ( y ( i ) − v ) 2 ) = 1 2 ∑ i = 1 n ( ∂ ∂ v ( y ( i ) 2 − 2 y ( i ) v + v 2 ) ) = 1 2 ∑ i = 1 n ( − 2 y ( i ) + 2 v ) = ∑ i = 1 n ( v − y ( i ) ) \begin{aligned} \frac{\partial u}{\partial v} &=\frac{\partial}{\partial v}\left(\frac{1}{2} \sum_{i=1}^{n}\left(y^{(i)}-v\right)^{2}\right) \\ &=\frac{1}{2} \sum_{i=1}^{n}\left(\frac{\partial}{\partial v}\left(y^{(i)}-v\right)^{2}\right) \\ &=\frac{1}{2} \sum_{i=1}^{n}\left(\frac{\partial}{\partial v}\left(y^{(i)^{2}}-2 y^{(i)} v+v^{2}\right)\right) \\ &=\frac{1}{2} \sum_{i=1}^{n}\left(-2 y^{(i)}+2 v\right) \\ &=\sum_{i=1}^{n}\left(v-y^{(i)}\right) \end{aligned} ∂v∂u=∂v∂(21i=1∑n(y(i)−v)2)=21i=1∑n(∂v∂(y(i)−v)2)=21i=1∑n(∂v∂(y(i)2−2y(i)v+v2))=21i=1∑n(−2y(i)+2v)=i=1∑n(v−y(i))
最后一行,常数与1/2 相抵消了,微分后的表达式变简单了,这就是一开始乘以1/2 的理由。
下面是 v 对 θ 0 \theta_{0} θ0的微分:
∂ v ∂ θ 0 = ∂ ∂ θ 0 ( θ 0 + θ 1 x ) = 1 \begin{aligned} \frac{\partial v}{\partial \theta_{0}} &=\frac{\partial}{\partial \theta_{0}}\left(\theta_{0}+\theta_{1} x\right) \\ &=1 \end{aligned} ∂θ0∂v=∂θ0∂(θ0+θ1x)=1
下面将各部分相乘:
∂ u ∂ θ 0 = ∂ u ∂ v ⋅ ∂ v ∂ θ 0 = ∑ i = 1 n ( v − y ( i ) ) ⋅ 1 = ∑ i = 1 n ( f θ ( x ( i ) ) − y ( i ) ) \begin{aligned} \frac{\partial u}{\partial \theta_{0}} &=\frac{\partial u}{\partial v} \cdot \frac{\partial v}{\partial \theta_{0}} \\ &=\sum_{i=1}^{n}\left(v-y^{(i)}\right) \cdot 1 \\ &=\sum_{i=1}^{n}\left(f_{\theta}\left(x^{(i)}\right)-y^{(i)}\right) \end{aligned} ∂θ0∂u=∂v∂u⋅∂θ0∂v=i=1∑n(v−y(i))⋅1=i=1∑n(fθ(x(i))−y(i))
接下来再算一下对 θ 1 \theta_{1} θ1进行微分的结果:
∂ v ∂ θ 1 = ∂ ∂ θ 1 ( θ 0 + θ 1 x ) = x \begin{aligned} \frac{\partial v}{\partial \theta_{1}} &=\frac{\partial}{\partial \theta_{1}}\left(\theta_{0}+\theta_{1} x\right) \\ &=x \end{aligned} ∂θ1∂v=∂θ1∂(θ0+θ1x)=x
u 对 v 微分的部分前面已经计算可以直接使用,最终对 θ 1 \theta_{1} θ1微分的结果:
∂ u ∂ θ 1 = ∂ u ∂ v ⋅ ∂ v ∂ θ 1 = ∑ i = 1 n ( v − y ( i ) ) ⋅ x ( i ) = ∑ i = 1 n ( f θ ( x ( i ) ) − y ( i ) ) x ( i ) \begin{aligned} \frac{\partial u}{\partial \theta_{1}} &=\frac{\partial u}{\partial v} \cdot \frac{\partial v}{\partial \theta_{1}} \\ &=\sum_{i=1}^{n}\left(v-y^{(i)}\right) \cdot x^{(i)} \\ &=\sum_{i=1}^{n}\left(f_{\theta}\left(x^{(i)}\right)-y^{(i)}\right) x^{(i)} \end{aligned} ∂θ1∂u=∂v∂u⋅∂θ1∂v=i=1∑n(v−y(i))⋅x(i)=i=1∑n(fθ(x(i))−y(i))x(i)
所以参数 θ 0 \theta_{0} θ0和 θ 1 \theta_{1} θ1的更新表达式就是这样的:
θ 0 : = θ 0 − η ∑ i = 1 n ( f θ ( x ( i ) ) − y ( i ) ) θ 1 : = θ 1 − η ∑ i = 1 n ( f θ ( x ( i ) ) − y ( i ) ) x ( i ) \begin{array}{l} \theta_{0}:=\theta_{0}-\eta \sum_{i=1}^{n}\left(f_{\theta}\left(x^{(i)}\right)-y^{(i)}\right) \\ \theta_{1}:=\theta_{1}-\eta \sum_{i=1}^{n}\left(f_{\theta}\left(x^{(i)}\right)-y^{(i)}\right) x^{(i)} \end{array} θ0:=θ0−η∑i=1n(fθ(x(i))−y(i))θ1:=θ1−η∑i=1n(fθ(x(i))−y(i))x(i)
下面我们使用numpy实现梯度下降法求解这个问题:
梯度下降法
首先我们要实现的 f θ ( x ) f_{\theta}(x) fθ(x)和目标函数 E ( θ ) E(θ) E(θ)
f θ ( x ) = θ 0 + θ 1 x f_{\theta}(x) = \theta_{0} + \theta_{1}x fθ(x)=θ0+θ1x
E ( θ ) = 1 2 ∑ i = 1 n ( y ( i ) − f θ ( x ( i ) ) ) 2 E(\theta)=\frac{1}{2} \sum_{i=1}^{n}\left(y^{(i)}-f_{\theta}\left(x^{(i)}\right)\right)^{2} E(θ)=21i=1∑n(y(i)−fθ(x(i)))2
定义参数和函数:
# 参数初始化
theta0 = np.random.rand()
theta1 = np.random.rand()
# 预测函数
def f(x):
return theta0 + theta1 * x
# 目标函数
def E(x, y):
return 0.5 * np.sum((y - f(x)) ** 2)
接下来为了保证参数收敛的速度不会太慢,先对训练数据进行标准化,将其变成平均值为0、方差为 1 的数据。
µ 是训练数据的平均值,σ 是标准差:
z ( i ) = x ( i ) − μ σ z^{(i)}=\frac{x^{(i)}-\mu}{\sigma} z(i)=σx(i)−μ
python处理代码:
# 标准化
mu = train_x.mean()
sigma = train_x.std()
def standardize(x):
return (x - mu) / sigma
train_z = standardize(train_x)
plt.plot(train_z, train_y, 'o')
plt.show()
变换后的数据可以看到横轴的刻度改变了。
对于参数 θ 0 \theta_{0} θ0和 θ 1 \theta_{1} θ1的更新表达式:
θ 0 : = θ 0 − η ∑ i = 1 n ( f θ ( x ( i ) ) − y ( i ) ) θ 1 : = θ 1 − η ∑ i = 1 n ( f θ ( x ( i ) ) − y ( i ) ) x ( i ) \begin{array}{l} \theta_{0}:=\theta_{0}-\eta \sum_{i=1}^{n}\left(f_{\theta}\left(x^{(i)}\right)-y^{(i)}\right) \\ \theta_{1}:=\theta_{1}-\eta \sum_{i=1}^{n}\left(f_{\theta}\left(x^{(i)}\right)-y^{(i)}\right) x^{(i)} \end{array} θ0:=θ0−η∑i=1n(fθ(x(i))−y(i))θ1:=θ1−η∑i=1n(fθ(x(i))−y(i))x(i)
η的值要试几次才能确定,可以先设置为 1 0 − 3 10^{−3} 10−3尝试一下。对目标函数进行微分,不断重复参数的更新,我们可以指定重复次数,也可以比较参数更新前后目标函数的值,如果值基本没什么变化,就可以结束学习了。
numpy实现代码:
# 学习率
ETA = 1e-3
# 误差的差值
diff = 1
# 更新次数
count = 0
# 直到误差的差值小于 0.01 为止,重复参数更新
error = E(train_z, train_y)
while diff > 1e-2:
# 更新结果保存到临时变量
tmp_theta0 = theta0 - ETA * np.sum((f(train_z) - train_y))
tmp_theta1 = theta1 - ETA * np.sum((f(train_z) - train_y) * train_z)
# 更新参数
theta0 = tmp_theta0
theta1 = tmp_theta1
# 计算与上一次误差的差值
current_error = E(train_z, train_y)
diff = error - current_error
error = current_error
# 输出日志
count += 1
log = '第 {} 次 : theta0 = {:.3f}, theta1 = {:.3f}, 差值 = {:.4f}'
print(log.format(count, theta0, theta1, diff))
打印结果:
......
第 390 次 : theta0 = 428.988, theta1 = 93.444, 差值 = 0.0114
第 391 次 : theta0 = 428.991, theta1 = 93.444, 差值 = 0.0109
第 392 次 : theta0 = 428.994, theta1 = 93.445, 差值 = 0.0105
第 393 次 : theta0 = 428.997, theta1 = 93.446, 差值 = 0.0101
第 394 次 : theta0 = 429.000, theta1 = 93.446, 差值 = 0.0097
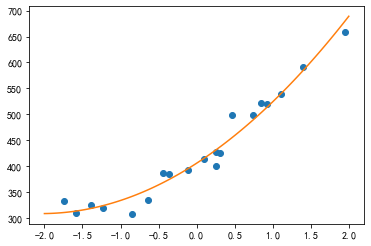
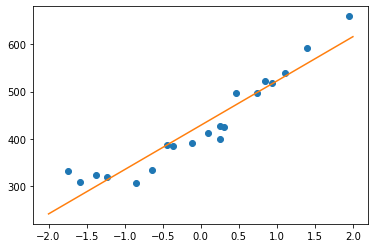
绘图查看拟合效果:
# 绘图确认
x = np.linspace(-2, 2, 100)
plt.plot(train_z, train_y, 'o')
plt.plot(x, f(x))
plt.show()
需要预测结果时只需先将数据标准化后再传入模型中即可:
f(standardize(100))
完整代码:
import pandas as pd
import numpy as np
import matplotlib.pyplot as plt
%matplotlib inline
df = pd.read_csv("click.csv")
df.sort_values("x", inplace=True)
train = df.values
train_x = train[:, 0]
train_y = train[:, 1]
# 标准化
def standardize(x):
mu = x.mean()
sigma = x.std()
return (x - mu) / sigma
train_z = standardize(train_x)
# 参数初始化
theta0 = np.random.rand()
theta1 = np.random.rand()
# 预测函数
def f(x):
return theta0 + theta1 * x
# 目标函数
def E(x, y):
return 0.5 * np.sum((y - f(x)) ** 2)
# 学习率
ETA = 1e-3
# 误差的差值
diff = 1
# 更新次数
count = 0
# 直到误差的差值小于 0.01 为止,重复参数更新
error = E(train_z, train_y)
while diff > 1e-2:
# 更新结果保存到临时变量
tmp_theta0 = theta0 - ETA * np.sum((f(train_z) - train_y))
tmp_theta1 = theta1 - ETA * np.sum((f(train_z) - train_y) * train_z)
# 更新参数
theta0 = tmp_theta0
theta1 = tmp_theta1
# 计算与上一次误差的差值
current_error = E(train_z, train_y)
diff = error - current_error
error = current_error
# 输出日志
count += 1
log = '第 {} 次 : theta0 = {:.3f}, theta1 = {:.3f}, 差值 = {:.4f}'
print(log.format(count, theta0, theta1, diff))
多项式回归
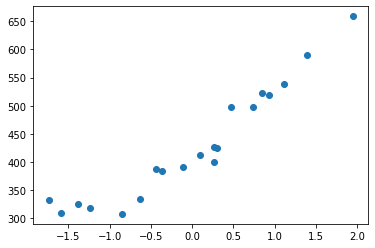
上面我们使用直线拟合了模型,但对于上面所给的数据其实曲线比直线拟合得更好:
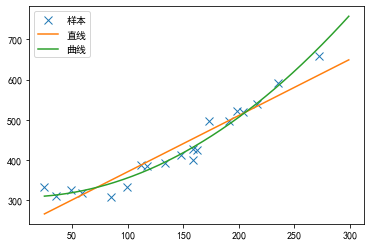
我们把 f θ ( x ) f_{\theta}(x) fθ(x)定义为二次函数,就能用它来表示这条曲线了:
f θ ( x ) = θ 0 + θ 1 x + θ 2 x 2 f_{\theta}(x)=\theta_{0}+\theta_{1} x+\theta_{2} x^{2} fθ(x)=θ0+θ1x+θ2x2
或者用更大次数的表达式也可以。这样就能表示更复杂的曲线了:
f θ ( x ) = θ 0 + θ 1 x + θ 2 x 2 + θ 3 x 3 + ⋯ + θ n x n f_{\theta}(x)=\theta_{0}+\theta_{1} x+\theta_{2} x^{2}+\theta_{3} x^{3}+\cdots+\theta_{n} x^{n} fθ(x)=θ0+θ1x+θ2x2+θ3x3+⋯+θnxn
虽然次数越大拟合得越好,但难免也会出现过拟合的问题。在找出最合适的表达式之前,需要不断地去尝试。
现在我们只针对二次函数进行求解,设 u = E(θ) 、 v = f θ ( x ) f_{\theta}(x) fθ(x),然后用 u 对 θ 2 θ_2 θ2偏微分,求出更新表达式。
∂ v ∂ θ 2 = ∂ ∂ θ 2 ( θ 0 + θ 1 x + θ 2 x 2 ) = x 2 \begin{aligned} \frac{\partial v}{\partial \theta_{2}} &=\frac{\partial}{\partial \theta_{2}}\left(\theta_{0}+\theta_{1} x+\theta_{2} x^{2}\right) \\ &=x^{2} \end{aligned} ∂θ2∂v=∂θ2∂(θ0+θ1x+θ2x2)=x2
最终更新表达式为:
θ 0 : = θ 0 − η ∑ i = 1 n ( f θ ( x ( i ) ) − y ( i ) ) θ 1 : = θ 1 − η ∑ i = 1 n ( f θ ( x ( i ) ) − y ( i ) ) x ( i ) θ 2 : = θ 2 − η ∑ i = 1 n ( f θ ( x ( i ) ) − y ( i ) ) x ( i ) 2 \begin{array}{l} \theta_{0}:=\theta_{0}-\eta \sum_{i=1}^{n}\left(f_{\theta}\left(x^{(i)}\right)-y^{(i)}\right) \\ \theta_{1}:=\theta_{1}-\eta \sum_{i=1}^{n}\left(f_{\theta}\left(x^{(i)}\right)-y^{(i)}\right) x^{(i)} \\ \theta_{2}:=\theta_{2}-\eta \sum_{i=1}^{n}\left(f_{\theta}\left(x^{(i)}\right)-y^{(i)}\right) x^{(i)^{2}} \end{array} θ0:=θ0−η∑i=1n(fθ(x(i))−y(i))θ1:=θ1−η∑i=1n(fθ(x(i))−y(i))x(i)θ2:=θ2−η∑i=1n(fθ(x(i))−y(i))x(i)2
即使再增加参数,依然可以用同样的方法求出它们的更新表达式,像这样增加函数中多项式的次数,然后再使用函数的分析方法被称为多项式回归。
将参数和训练数据都作为向量来处理,可以使计算变得更简单:
θ = [ θ 0 θ 1 θ 2 ] x ( i ) = [ 1 x ( i ) x ( i ) 2 ] \boldsymbol{\theta}=\left[\begin{array}{l} \theta_{0} \\ \theta_{1} \\ \theta_{2} \end{array}\right] \quad \boldsymbol{x}^{(i)}=\left[\begin{array}{c} 1 \\ x^{(i)} \\ x^{(i)^{2}} \end{array}\right] θ=⎣⎡θ0θ1θ2⎦⎤x(i)=⎣⎡1x(i)x(i)2⎦⎤
由于训练数据有很多,我们把 1 行数据当作 1 个训练数据,以矩阵的形式来处理会更好:
X = [ x ( 1 ) T x ( 2 ) T x ( 3 ) T ⋮ x ( n ) T ] = [ 1 x ( 1 ) x ( 1 ) 2 1 x ( 2 ) x ( 2 ) 2 1 x ( 3 ) x ( 3 ) 2 ⋮ 1 x ( n ) x ( n ) 2 ] \boldsymbol{X}=\left[\begin{array}{c} \boldsymbol{x}^{(1)^{\mathrm{T}}} \\ \boldsymbol{x}^{(2)^{\mathrm{T}}} \\ \boldsymbol{x}^{(3)^{\mathrm{T}}} \\ \vdots \\ \boldsymbol{x}^{(n)^{\mathrm{T}}} \end{array}\right]=\left[\begin{array}{ccc} 1 & x^{(1)} & x^{(1)^{2}} \\ 1 & x^{(2)} & x^{(2)^{2}} \\ 1 & x^{(3)} & x^{(3)^{2}} \\ & \vdots & \\ 1 & x^{(n)} & x^{(n)^{2}} \end{array}\right] X=⎣⎢⎢⎢⎢⎢⎢⎡x(1)Tx(2)Tx(3)T⋮x(n)T⎦⎥⎥⎥⎥⎥⎥⎤=⎣⎢⎢⎢⎢⎢⎢⎡1111x(1)x(2)x(3)⋮x(n)x(1)2x(2)2x(3)2x(n)2⎦⎥⎥⎥⎥⎥⎥⎤
再求这个矩阵与参数向量 θ 的积:
X θ = [ 1 x ( 1 ) x ( 1 ) 2 1 x ( 2 ) x ( 2 ) 2 1 x ( 3 ) x ( 3 ) 2 ⋮ 1 x ( n ) x ( n ) 2 ] [ θ 0 θ 1 θ 2 ] = [ θ 0 + θ 1 x ( 1 ) + θ 2 x ( 1 ) 2 θ 0 + θ 1 x ( 2 ) + θ 2 x ( 2 ) 2 ⋮ θ 0 + θ 1 x ( n ) + θ 2 x ( n ) 2 ] \boldsymbol{X} \boldsymbol{\theta}=\left[\begin{array}{ccc} 1 & x^{(1)} & x^{(1)^{2}} \\ 1 & x^{(2)} & x^{(2)^{2}} \\ 1 & x^{(3)} & x^{(3)^{2}} \\ & \vdots & \\ 1 & x^{(n)} & x^{(n)^{2}} \end{array}\right]\left[\begin{array}{c} \theta_{0} \\ \theta_{1} \\ \theta_{2} \end{array}\right]=\left[\begin{array}{c} \theta_{0}+\theta_{1} x^{(1)}+\theta_{2} x^{(1)^{2}} \\ \theta_{0}+\theta_{1} x^{(2)}+\theta_{2} x^{(2)^{2}} \\ \vdots \\ \theta_{0}+\theta_{1} x^{(n)}+\theta_{2} x^{(n)^{2}} \end{array}\right] Xθ=⎣⎢⎢⎢⎢⎢⎢⎡1111x(1)x(2)x(3)⋮x(n)x(1)2x(2)2x(3)2x(n)2⎦⎥⎥⎥⎥⎥⎥⎤⎣⎡θ0θ1θ2⎦⎤=⎣⎢⎢⎢⎢⎡θ0+θ1x(1)+θ2x(1)2θ0+θ1x(2)+θ2x(2)2⋮θ0+θ1x(n)+θ2x(n)2⎦⎥⎥⎥⎥⎤
python描述代码:
# 参数初始化
theta = np.random.rand(3)
# 创建训练数据的矩阵
def to_matrix(x):
return np.vstack([np.ones(x.size), x, x ** 2]).T
X = to_matrix(train_z)
# 预测函数
def f(x):
return np.dot(x, theta)
更新表达式可以写成通用的表达式:
θ j : = θ j − η ∑ i = 1 n ( f θ ( x ( i ) ) − y ( i ) ) x j ( i ) \theta_{j}:=\theta_{j}-\eta \sum_{i=1}^{n}\left(f_{\theta}\left(\boldsymbol{x}^{(i)}\right)-y^{(i)}\right) x_{j}^{(i)} θj:=θj−ηi=1∑n(fθ(x(i))−y(i))xj(i)
这时我们好好利用训练矩阵X,就能一下子全部计算出来。在 j = 0 的时,设:
f = [ f θ ( x ( 1 ) ) − y ( 1 ) f θ ( x ( 2 ) ) − y ( 2 ) ⋮ f θ ( x ( n ) ) − y ( n ) ] x 0 = [ x 0 ( 1 ) x 0 ( 2 ) ⋮ x 0 ( n ) ] f=\left[\begin{array}{c} f_{\theta}\left(\boldsymbol{x}^{(1)}\right)-y^{(1)} \\ f_{\theta}\left(\boldsymbol{x}^{(2)}\right)-y^{(2)} \\ \vdots \\ f_{\boldsymbol{\theta}}\left(\boldsymbol{x}^{(n)}\right)-y^{(n)} \end{array}\right] \quad \boldsymbol{x}_{0}=\left[\begin{array}{c} x_{0}^{(1)} \\ x_{0}^{(2)} \\ \vdots \\ x_{0}^{(n)} \end{array}\right] f=⎣⎢⎢⎢⎡fθ(x(1))−y(1)fθ(x(2))−y(2)⋮fθ(x(n))−y(n)⎦⎥⎥⎥⎤x0=⎣⎢⎢⎢⎢⎡x0(1)x0(2)⋮x0(n)⎦⎥⎥⎥⎥⎤
则:
∑ i = 1 n ( f θ ( x ( i ) ) − y ( i ) ) x 0 ( i ) = f T x 0 \sum_{i=1}^{n}\left(f_{\theta}\left(\boldsymbol{x}^{(i)}\right)-y^{(i)}\right) x_{0}^{(i)}=\boldsymbol{f}^{\mathrm{T}} \boldsymbol{x}_{0} i=1∑n(fθ(x(i))−y(i))x0(i)=fTx0
这里考虑的还只是 j = 0 的情况,而参数共有 3 个,再用同样的思路考虑 x 1 x_1 x1和 x 2 x_2 x2的情况就好了。
x 0 = [ 1 1 ⋮ 1 ] , x 1 = [ x ( 1 ) x ( 2 ) ⋮ x ( n ) ] , x 2 = [ x ( 1 ) 2 x ( 2 ) 2 ⋮ x ( n ) 2 ] X = [ x 0 x 1 x 2 ] = [ 1 x ( 1 ) x ( 1 ) 2 1 x ( 2 ) x ( 2 ) 2 1 x ( 3 ) x ( 3 ) 2 ⋮ 1 x ( n ) x ( n ) 2 ] \begin{array}{l} x_{0}=\left[\begin{array}{c} 1 \\ 1 \\ \vdots \\ 1 \end{array}\right], x_{1}=\left[\begin{array}{c} x^{(1)} \\ x^{(2)} \\ \vdots \\ x^{(n)} \end{array}\right], x_{2}=\left[\begin{array}{c} x^{(1)^{2}} \\ x^{(2)^{2}} \\ \vdots \\ x^{(n)^{2}} \end{array}\right] \\ X=\left[\begin{array}{lll} x_{0} & x_{1} & x_{2} \end{array}\right]=\left[\begin{array}{ccc} 1 & x^{(1)} & x^{(1)^{2}} \\ 1 & x^{(2)} & x^{(2)^{2}} \\ 1 & x^{(3)} & x^{(3)^{2}} \\ \vdots & \\ 1 & x^{(n)} & x^{(n)^{2}} \end{array}\right] \end{array} x0=⎣⎢⎢⎢⎡11⋮1⎦⎥⎥⎥⎤,x1=⎣⎢⎢⎢⎡x(1)x(2)⋮x(n)⎦⎥⎥⎥⎤,x2=⎣⎢⎢⎢⎢⎡x(1)2x(2)2⋮x(n)2⎦⎥⎥⎥⎥⎤X=[x0x1x2]=⎣⎢⎢⎢⎢⎢⎢⎡111⋮1x(1)x(2)x(3)x(n)x(1)2x(2)2x(3)2x(n)2⎦⎥⎥⎥⎥⎥⎥⎤
最后该将 f 和这个 X 相乘就可以了:
f T X \boldsymbol{f}^{\mathrm{T}} \boldsymbol{X} fTX
python语言描述:
# 误差的差值
diff = 1
# 更新次数
count = 0
# 直到误差的差值小于 0.01 为止,重复参数更新
error = E(X, train_y)
while diff > 1e-2:
# 更新结果保存到临时变量
theta = theta - ETA * np.dot(f(X) - train_y, X)
# 计算与上一次误差的差值
current_error = E(X, train_y)
diff = error - current_error
error = current_error
完整代码:
import numpy as np
import matplotlib.pyplot as plt
# 读入训练数据
train = np.loadtxt('click.csv', delimiter=',', dtype='int', skiprows=1)
train_x = train[:,0]
train_y = train[:,1]
# 标准化
mu = train_x.mean()
sigma = train_x.std()
def standardize(x):
return (x - mu) / sigma
train_z = standardize(train_x)
# 参数初始化
theta = np.random.rand(3)
# 创建训练数据的矩阵
def to_matrix(x):
return np.vstack([np.ones(x.size), x, x ** 2]).T
X = to_matrix(train_z)
# 预测函数
def f(x):
return np.dot(x, theta)
# 目标函数
def E(x, y):
return 0.5 * np.sum((y - f(x)) ** 2)
# 学习率
ETA = 1e-3
# 误差的差值
diff = 1
# 更新次数
count = 0
# 直到误差的差值小于 0.01 为止,重复参数更新
error = E(X, train_y)
while diff > 1e-2:
# 更新结果保存到临时变量
theta = theta - ETA * np.dot(f(X) - train_y, X)
# 计算与上一次误差的差值
current_error = E(X, train_y)
diff = error - current_error
error = current_error
# 输出日志
count += 1
log = '第 {} 次 : theta = {}, 差值 = {:.4f}'
print(log.format(count, theta, diff))
# 绘图确认
x = np.linspace(-2, 2, 100)
plt.plot(train_z, train_y, 'o')
plt.plot(x, f(to_matrix(x)))
plt.show()