mpu9250磁力计校准 mpl库数据校准
写在前面
前段时间弄了MPU9250,也就是9轴传感器,用的是官方的mpl库。但是读的欧拉角翻滚角和俯仰角都很准,就是航向角不准。快速的转动一下,再回到原来的角度,航向角就偏移了几十度,完全达不到预期。因为航向角需要融合磁力计数据但是磁力计需要校准,一开始不知道怎么校准磁力计数据所以这个问题困扰了我好久,直到最近才弄好,所以想把我的一些经验分享给大家,以免大家遇到同样的困扰。
为什么磁力计需要校准
&emsp至于为什么磁力计需要校准,大家看下下面这几个图就应该清楚了。
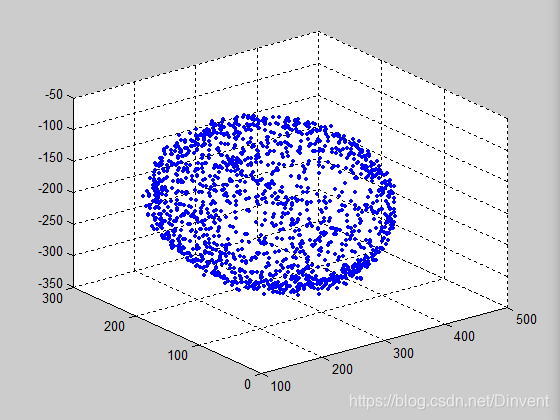
如图1所示是我通过串口助手获取的原始磁力计数据,然后再将数据导入excel表格,在matlab上面显示的结果。大家应该可以清楚的发现,磁力计读出的数据是个椭球。这是因为磁力计是三个互相垂直的霍尔元件组成的一个传感器,每个轴的数据都是地磁场在每个轴的分量,但是由于传感器之间有差异所以导致椭圆的轴并不相同,而且大家可以从图上看出磁力传感器和加速度传感器一样,磁力计的数据原点并不是0,所以我们还要进行椭圆拟合求出,椭球的原点和椭球的轴长。

上图2是我通过matlab拟合椭圆中心和轴长的数据,说到椭球拟合也是费了我不少功夫,我也是在一篇博客上看到一个博主推到的公式,以前没怎么弄过matlab,所以又花了时间把matlab看了下才写出的这个拟合函数。
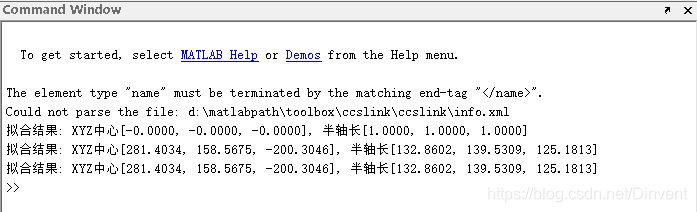
图3是我通过matlab拟合后的结果,但是拟合好数据又要将数据融合到世界坐标系,然后又是各种资料,各种数学公式,又困扰了我好久,最后感觉自己实在弄不好,就又重新看了下mpl的库文档,发现库文档上面说mpl库会自动校准数据,让传感器做8字运动会加快磁力计校准,所以我又重新试了下,8字运动了一两分钟后发现果然可以了,数据很准。相比于我们网上很多的数据融合算法,官方的mpl库还是更强大一些,毕竟是大公司的产品。
官方的mpl库简介
官方的mpl库具有以下特点:
1.陀螺仪实时校准,只要检测到陀螺仪停止5s就回重新校准陀螺仪。
2.陀螺仪温度补偿。
3.磁力计校准,只要收集到足够的数据就会在算法中融合磁力计数据,不然就只融合6轴传感器数据,做8字运动会加快校准。
4.抗强磁干扰,当有强磁干扰的时候会启动6轴融合,不融合磁力计数据。
如何磁力计校准以及保存校准数据
但是我们怎么知道数据什么时候融合好呢?其中有一个这个函数,
int inv_get_sensor_type_euler(long *data, int8_t *accuracy, inv_time_t *timestamp)
大家可以获取accuracy的值,在没有磁力计没有校准钱accuracy为0,校准后值为3,大家可以一直把这个值显示出来,在校准好数据前一直让传感器做8字运动,加快校准。
但是每次校准都要不少时间每次重启都要校准的话岂不是很麻烦,当然这个问题官方也肯定想到了。
其中有三个函数是关于储存校准数据的:

inv_error_t inv_get_mpl_state_size(size_t *size);
inv_error_t inv_load_mpl_states(const unsigned char *data, size_t len);
inv_error_t inv_save_mpl_states(unsigned char *data, size_t len);
inv_save_mpl_states()此函数保存校准的数据,大家只要把数据通过flash存下来就好了,然后下次上电的时候通过inv_load_mpl_states()函数重新读取下数据。至于存放数据的大小可以同此函数inv_get_mpl_state_size()来获取。
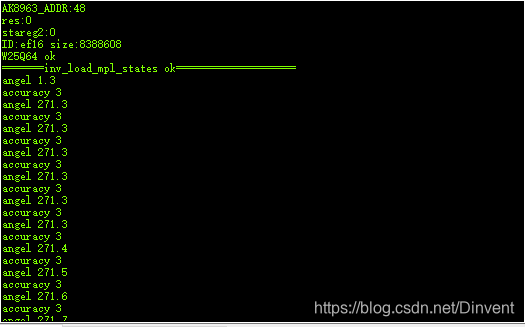
如图4所示为校准后的数据结果,我们可以发现在校准后第一个数据还是1.3,第二个数据才变成正在的校准后的数据,所以我们在使用的时候可以把第一个结果舍去。
还要一点需要注意的是,我在测试过程中发现数据校准好了,也就是accuracy值为3了,但是一会accuracy又变为0了,这事大家可以把强磁干扰给关了,这样校准好数据后accuracy值就不会变为0了。至于怎么关,我用的是正点原子的程序改的,只要把mpu_dmp_init()函数中的inv_enable_magnetic_disturbance()使能抗强磁干扰给关了就行了。
参考代码
这是我写的校准代码,大家可以参考下,功能是将mpu获取的欧拉角数据和accuracy值通过串口打印出来,如果accuracy为3,说明数据校准完成,当按下按键时就把校准数据保存到flash中,下次再启动则直接读取上传的校准数据。
//MAIN函数
int main(void)
{
u8 res;
u32 size;
u8 key;
float pitch,roll,yaw;
Cache_Enable(); //打开L1-Cache
HAL_Init(); //初始化HAL库
Stm32_Clock_Init(160,5,2,4); //设置时钟,400Mhz
delay_init(400); //延时初始化
uart_init(256000); //串口初始化
LED_Init(); //初始化LED
KEY_Init(); //初始化按键
while(MPU9250_Init())
{
printf("MPU9250_Init Error\r\n");
delay_ms(1000);
}
LCD_Init();
res=mpu_dmp_init();
printf("res:%d\r\n",res);
LCD_Clear(WHITE); //清屏
Draw_Font16B(16,16,RED, (u8 *)"MPU TEST");
NORFLASH_Init(); //NORFLASH(W25Q64)初始化
if(NORFLASH_ReadID()!=W25Q64)
{
printf("W25Q64 error\r\n");
delay_ms(500);
LED0_Toggle;
}
else
{
printf("W25Q64 ok\r\n");
}
NORFLASH_Read(mpudateBuff,MpuSaveDateAddr,sizeof(mpudateBuff));//读取mpu9250校准数据
if(inv_load_mpl_states(mpudateBuff,sizeof(mpudateBuff))==INV_SUCCESS)
{
printf("=======inv_load_mpl_states ok====================\r\n");
}
else
{
printf("=======inv_load_mpl_states error====================\r\n");
}
while(1)
{
LED0_Toggle;
key=KEY_Scan(0);
if(key==KEY1_PRES)
{
printf("key1_press====================\r\n");
if(inv_get_mpl_state_size(&size)==INV_SUCCESS)
{
printf("=======inv_get_mpl_state_size ok====================\r\n");
printf("lensize:%d\r\n",size);
if(inv_save_mpl_states(mpudateBuff,sizeof(mpudateBuff))==INV_SUCCESS)
{
printf("=======inv_save_mpl_states ok====================\r\n");
NORFLASH_Write((u8*)mpudateBuff,MpuSaveDateAddr,sizeof(mpudateBuff));
}
else
{
printf("=======inv_save_mpl_states error====================\r\n");
}
}
}
if(mpu_mpl_get_data(&pitch,&roll,&yaw)==0)
{
printf("pitch:%.1f,roll:%.1f,yaw:%.1f\r\n",pitch,roll,yaw);
}
delay_us(10000); //延时1s,也就是1000个时钟节拍
}
}
//mpu_mpl_get_data欧拉角获取函数
u8 mpu_mpl_get_data(float *pitch,float *roll,float *yaw)
{
unsigned long sensor_timestamp=0,timestamp=0;
short gyro[3], accel_short[3],compass_short[3],sensors;
unsigned char more;
long compass[3],accel[3],quat[4],temperature;
long data[9];
int8_t accuracy;
if(dmp_read_fifo(gyro, accel_short, quat, &sensor_timestamp, &sensors,&more))return 1;
if(sensors&INV_XYZ_GYRO)
{
inv_build_gyro(gyro,sensor_timestamp); //把新数据发送给MPL
mpu_get_temperature(&temperature,&sensor_timestamp);
inv_build_temp(temperature,sensor_timestamp); //把温度值发给MPL,只有陀螺仪需要温度值
}
if(sensors&INV_XYZ_ACCEL)
{
accel[0] = (long)accel_short[0];
accel[1] = (long)accel_short[1];
accel[2] = (long)accel_short[2];
inv_build_accel(accel,0,sensor_timestamp); //把加速度值发给MPL
}
if (!mpu_get_compass_reg(compass_short, &sensor_timestamp))
{
compass[0]=(long)compass_short[0];
compass[1]=(long)compass_short[1];
compass[2]=(long)compass_short[2];
inv_build_compass(compass,0,sensor_timestamp); //把磁力计值发给MPL
}
inv_execute_on_data();
inv_get_sensor_type_euler(data,&accuracy,×tamp);
*roll = (data[0]/q16);
*pitch = -(data[1]/q16);
*yaw = -data[2] / q16;
printf("accuracy %d\r\n",accuracy);
return 0;
}
总结
总结一下我遇到的问题:
1.如果用杜邦线连mpu9250的话杜邦线要尽量短,不然读出来的设备地址可能就是0xff或者0xd1等等了,我是把杜邦线剪短再重新用热缩管接好才解决这个问题的。
2.mpu9250要正这放,不然自检通不过。
3.通过inv_get_sensor_type_euler()函数来获取accuracy值来确定磁力计数据是否校准好,为3则校准好,为0没校准好。
4.做8字校准会加快校准速度,如果如果2分钟也没校准好也不要急慢慢来。
5.通过inv_save_mpl_states()等函数来保存校准数据。