从上一篇博文中,推导出相机的内参矩阵和外参矩阵。
内参参数包括:
针孔相机模型的内参包含6个(f,κ,fx,fy,u0,v0);
f 为相机的焦距,单位一般是mm。
fx = f/dx, fy = f/dy,分别称为x轴和y轴上的归一化焦距。一个像素的实际物理尺寸在x方向和y方向分别为dx和dy,dx,dy 为像元尺寸。dx和dy表示x方向和y方向的一个像素分别占多少个单位,是反映现实中的图像物理坐标关系与像素坐标系转换的关键(可以理解为像元密度)。
(u0,v0 )为图像中心,u0,v0表示图像的中心像素坐标和图像原点像素坐标之间相差的横向和纵向像素数偏移量(以像素为单位)。
为了不失一般性,在相机的内参矩阵中,添加一个扭曲参数,在图像物理坐标系中的扭曲因子为。对于大多数标准相机,该扭曲参数
为0。
k:表示径向畸变量级,如果k为负值,畸变为桶型畸变,如果为正值,那畸变为枕型畸变,初始值为0。
外参参数包括:
决定摄像机坐标与世界坐标之间的相对位置关系。 相机的外参是6个,R = R(α,β,γ)是旋转矩阵,分别是绕摄像机坐标系z轴旋转角度为γ,绕y轴旋转角度为β,绕x轴旋转角度为α。s为坐标轴倾斜参数,理想情况下为0。得到大小3*3的集合三个轴旋转信息的R,T的三个轴的平移参数(Tx、Ty、Tz)。R、T组合成3*4的矩阵。
1、旋转矩阵:描述了世界坐标系的坐标轴相对于摄像机坐标轴的方向 。
2、平移矩阵:描述了在摄像机坐标系下,空间原点的位置。
畸变参数
畸变是相机本身的个固有属性,和相机内参相同,标定校准一次之后可重复使用。

图中dr表示径向畸变,dt表示切向畸变,图中理想左边点为(x,y),实际畸变点的坐标为。则满足如下坐标变换关系为:
径向畸变是沿着透镜半径方向分布的畸变,桶形畸变和枕形畸变是比较常见的径向畸变。产生原因:光线在远离透镜中心的位置发生弯曲更大的偏折。径向畸变发生在相机坐标系转换成图像物理坐标系的过程中,如图所示。

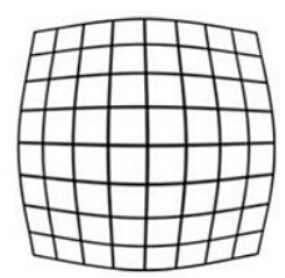
枕形畸变 桶形畸变

径向畸变的矫正公式如下:
其中
切向畸变是发生在相机制作过程,由于感光元平面跟透镜不平行的。因此,如果存在切向畸变,一个矩形被投影到成像平面上时,很可能会变成一个梯形。



切向畸变的畸变公式为:
矫正畸变后与矫正前的坐标关系为:
(x,y)是畸变点在成像仪上的原始位置,r为该点距离成像仪中心的距离,是校正后的新位置。
综上所述,一共需要标定5个畸变参数(k1,k2,k3,p1,p2)。
