本文结合OpenCV官方样例,对官方样例中的代码进行修改,使其能够正常运行,并对自己采集的数据进行实验和讲解。
一、准备
OpenCV使用棋盘格板进行标定,如下图所示。为了标定相机,我们需要输入一系列三维点和它们对应的二维图像点。在黑白相间的棋盘格上,二维图像点很容易通过角点检测找到。而对于真实世界中的三维点呢?由于我们采集中,是将相机放在一个地方,而将棋盘格定标板进行移动变换不同的位置,然后对其进行拍摄。所以我们需要知道(X,Y,Z)的值。但是简单来说,我们定义棋盘格所在平面为XY平面,即Z=0。对于定标板来说,我们可以知道棋盘格的方块尺寸,例如30mm,这样我们就可以把棋盘格上的角点坐标定义为(0,0,0),(30,0,0),(60,0,0),···,这个结果的单位是mm。
3D点称为object points,2D图像点称为image points。
棋盘格生成方法:《Python图像拼接之自定义生成棋盘格》
二、检测棋盘格角点
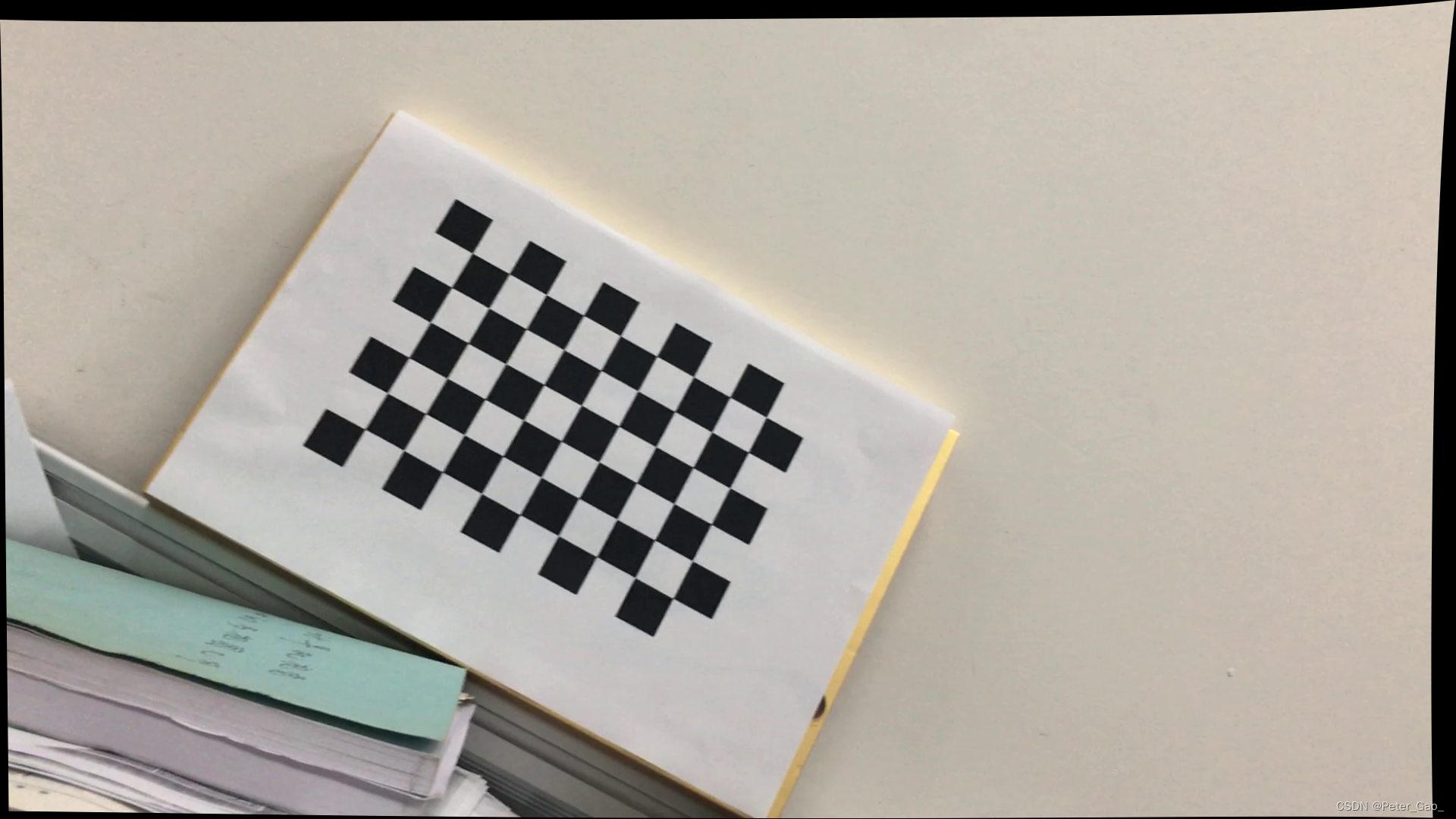
为了找到棋盘格模板,我们使用openCV中的函数cv2.findChessboardCorners()。我们也需要告诉程序我们使用的模板是什么规格的,例如8*8的棋盘格或者5*5棋盘格等,建议使用x方向和y方向个数不相等的棋盘格模板。下面实验中,我们使用的是10*7的棋盘格,每个方格边长是20mm,即含有9*6的内部角点。这个函数如果检测到模板,会返回对应的角点,并返回true。当然不一定所有的图像都能找到需要的模板,所以我们可以使用多幅图像进行定标。除了使用棋盘格,我们还可以使用圆点阵,对应的函数为cv2.findCirclesGrid()。
找到角点后,我们可以使用cv2.cornerSubPix()可以得到更为准确的角点像素坐标。我们也可以使用cv2.drawChessboardCorners()将角点绘制到图像上显示。如下图所示:

三、标定
通过上面的步骤,我们得到了用于标定的三维点和与其对应的图像上的二维点对。我们使用cv2.calibrateCamera()进行标定,这个函数会返回标定结果、相机的内参数矩阵、畸变系数、旋转矩阵和平移向量。
四、去畸变
第三步我们已经得到了相机内参和畸变系数,在将图像去畸变之前,我们还可以使用cv.getOptimalNewCameraMatrix()优化内参数和畸变系数,通过设定自由自由比例因子alpha。当alpha设为0的时候,将会返回一个剪裁过的将去畸变后不想要的像素去掉的内参数和畸变系数;当alpha设为1的时候,将会返回一个包含额外黑色像素点的内参数和畸变系数,并返回一个ROI用于将其剪裁掉。
然后我们就可以使用新得到的内参数矩阵和畸变系数对图像进行去畸变了。有两种方法进行去畸变:
(1)使用cv2.undistort()
这是一个最直接的办法,只用直接调用函数就可以得到去畸变的图像,使用上面的ROI可以对其进行剪裁。代码如下

# undistort
dst = cv2.undistort(img, mtx, dist, None, newcameramtx)
# crop the image
x,y,w,h = roi
dst = dst[y:y+h, x:x+w]
cv2.imwrite('calibresult.png',dst)下图显示将一张图片去畸变后,保留黑色像素的结果:
(2)使用remmaping
这是一个分两步的方法,首先计算一个从畸变图像到非畸变图像的映射,然后使用这个映射关系对图像进行去畸变。代码如下:
# undistort
mapx,mapy = cv2.initUndistortRectifyMap(mtx,dist,None,newcameramtx,(w,h),5)
dst = cv2.remap(img,mapx,mapy,cv2.INTER_LINEAR)
# crop the image
x,y,w,h = roi
dst = dst[y:y+h, x:x+w]
cv2.imwrite('calibresult.png',dst)五、反投影误差
通过反投影误差,我们可以来评估结果的好坏。越接近0,说明结果越理想。通过之前计算的内参数矩阵、畸变系数、旋转矩阵和平移向量,使用cv2.projectPoints()计算三维点到二维图像的投影,然后计算反投影得到的点与图像上检测到的点的误差,最后计算一个对于所有标定图像的平均误差,这个值就是反投影误差。
代码
所有步骤的代码如下所示:
#coding:utf-8
import cv2
import numpy as np
import glob
# 找棋盘格角点
# 阈值
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001)
#棋盘格模板规格
w = 9
h = 6
# 世界坐标系中的棋盘格点,例如(0,0,0), (1,0,0), (2,0,0) ....,(8,5,0),去掉Z坐标,记为二维矩阵
objp = np.zeros((w*h,3), np.float32)
objp[:,:2] = np.mgrid[0:w,0:h].T.reshape(-1,2)
# 储存棋盘格角点的世界坐标和图像坐标对
objpoints = [] # 在世界坐标系中的三维点
imgpoints = [] # 在图像平面的二维点
images = glob.glob('calib/*.png')
for fname in images:
img = cv2.imread(fname)
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
# 找到棋盘格角点
ret, corners = cv2.findChessboardCorners(gray, (w,h),None)
# 如果找到足够点对,将其存储起来
if ret == True:
cv2.cornerSubPix(gray,corners,(11,11),(-1,-1),criteria)
objpoints.append(objp)
imgpoints.append(corners)
# 将角点在图像上显示
cv2.drawChessboardCorners(img, (w,h), corners, ret)
cv2.imshow('findCorners',img)
cv2.waitKey(1)
cv2.destroyAllWindows()
# 标定
ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(objpoints, imgpoints, gray.shape[::-1], None, None)
# 去畸变
img2 = cv2.imread('calib/00169.png')
h, w = img2.shape[:2]
newcameramtx, roi=cv2.getOptimalNewCameraMatrix(mtx,dist,(w,h),0,(w,h)) # 自由比例参数
dst = cv2.undistort(img2, mtx, dist, None, newcameramtx)
# 根据前面ROI区域裁剪图片
#x,y,w,h = roi
#dst = dst[y:y+h, x:x+w]
cv2.imwrite('calibresult.png',dst)
# 反投影误差
total_error = 0
for i in xrange(len(objpoints)):
imgpoints2, _ = cv2.projectPoints(objpoints[i], rvecs[i], tvecs[i], mtx, dist)
error = cv2.norm(imgpoints[i],imgpoints2, cv2.NORM_L2)/len(imgpoints2)
total_error += error
print "total error: ", total_error/len(objpoints)自标定所有步骤连起来,标定自动化就完成了。
在这个过程中,你是否发现不经意又收到了平坦区域合并的算法,他实质是穿越点的界定的变化,这样,在二维平面上,当行列被自动界定(分割),则另一个好处是,平面任意平坦区域(高斯区域,变化不大区域,模糊区域)尽在掌握,这便开启了模糊匹配的想法。
在这个过程中,你还收获了行列list(序列)是如何归一化的算法,因为你可能收不到harris角点,某行某列,以及多收和干扰。
当你通透了SIFT(scale-invariant feature transform,还未代码实现),你会发现,这个实质是利用了hariss角点的分布为特征在做文章(实现匹配),SIFT只不过是把二维的harris角点映射到了三维空间。learning opencv的光流跟踪算法也就不在话下了,他除了可以跟踪光流,还可以求harris角点,这种二维矩阵运算的推导,实质是最小二乘法变化(换了个面孔),我们也推导和证明了结果相同。补充一句,SIFT的三维矩阵运算推导实质是光流二维矩阵运算的推导的扩展(算法已经证明),而一维则是泰勒展开多项式逼近。(在此,你就会知道吴恩达在机器学习(斯坦福大学课程)中为什么会那么重视矩阵形式的运算推导了)
在你回顾了这些数学知识后,你忽然发现learning opencv的光流推导有一个符号错误,在一维时,偏导数(不存在这种叫法)与微分相同,二维时,即隐函数微分法求出的结果是微分而不是偏导数,而learning opencv却写成了偏导符号。
以上说明,你就可以看到标定求harris角点在人工智能(AI)天空所喷薄而出的光芒,而你不去发觉这机器视觉中已经慢慢隐藏于硬件的标定,你如何能激活人工智能(AI)时代的自己。
————————————————
完整的
import cv2
import numpy as np
import glob
# 找棋盘格角点
# 阈值
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001)
# 棋盘格模板规格
# 内角点个数,内角点是和其他格子连着的点
w = 9
h = 6
# 世界坐标系中的棋盘格点,例如(0,0,0), (1,0,0), (2,0,0) ....,(8,5,0),去掉Z坐标,记为二维矩阵
objp = np.zeros((w * h, 3), np.float32)
objp[:, :2] = np.mgrid[0:w, 0:h].T.reshape(-1, 2)
# 储存棋盘格角点的世界坐标和图像坐标对
objpoints = [] # 在世界坐标系中的三维点
imgpoints = [] # 在图像平面的二维点
images = glob.glob('image/*.jpg')
for fname in images:
img = cv2.imread(fname)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 找到棋盘格角点
# 棋盘图像(8位灰度或彩色图像) 棋盘尺寸 存放角点的位置
ret, corners = cv2.findChessboardCorners(gray, (w, h), None)
# 如果找到足够点对,将其存储起来
if ret == True:
# 角点精确检测
# 输入图像 角点初始坐标 搜索窗口为2*winsize+1 死区 求角点的迭代终止条件
cv2.cornerSubPix(gray, corners, (11, 11), (-1, -1), criteria)
objpoints.append(objp)
imgpoints.append(corners)
# 将角点在图像上显示
cv2.drawChessboardCorners(img, (w, h), corners, ret)
cv2.imshow('findCorners', img)
cv2.waitKey(1000)
cv2.destroyAllWindows()
# 标定、去畸变
# 输入:世界坐标系里的位置 像素坐标 图像的像素尺寸大小 3*3矩阵,相机内参数矩阵 畸变矩阵
# 输出:标定结果 相机的内参数矩阵 畸变系数 旋转矩阵 平移向量
ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(objpoints, imgpoints, gray.shape[::-1], None, None)
# mtx:内参数矩阵
# dist:畸变系数
# rvecs:旋转向量 (外参数)
# tvecs :平移向量 (外参数)
print(("ret:"), ret)
print(("mtx:\n"), mtx) # 内参数矩阵
print(("dist:\n"), dist) # 畸变系数 distortion cofficients = (k_1,k_2,p_1,p_2,k_3)
print(("rvecs:\n"), rvecs) # 旋转向量 # 外参数
print(("tvecs:\n"), tvecs) # 平移向量 # 外参数
# 去畸变
img2 = cv2.imread('image/6.jpg')
h, w = img2.shape[:2]
# 我们已经得到了相机内参和畸变系数,在将图像去畸变之前,
# 我们还可以使用cv.getOptimalNewCameraMatrix()优化内参数和畸变系数,
# 通过设定自由自由比例因子alpha。当alpha设为0的时候,
# 将会返回一个剪裁过的将去畸变后不想要的像素去掉的内参数和畸变系数;
# 当alpha设为1的时候,将会返回一个包含额外黑色像素点的内参数和畸变系数,并返回一个ROI用于将其剪裁掉
newcameramtx, roi = cv2.getOptimalNewCameraMatrix(mtx, dist, (w, h), 0, (w, h)) # 自由比例参数
dst = cv2.undistort(img2, mtx, dist, None, newcameramtx)
# 根据前面ROI区域裁剪图片
x, y, w, h = roi
dst = dst[y:y + h, x:x + w]
cv2.imwrite('image/6_calibresult.jpg', dst)
# 反投影误差
# 通过反投影误差,我们可以来评估结果的好坏。越接近0,说明结果越理想。
# 通过之前计算的内参数矩阵、畸变系数、旋转矩阵和平移向量,使用cv2.projectPoints()计算三维点到二维图像的投影,
# 然后计算反投影得到的点与图像上检测到的点的误差,最后计算一个对于所有标定图像的平均误差,这个值就是反投影误差。
total_error = 0
for i in range(len(objpoints)):
imgpoints2, _ = cv2.projectPoints(objpoints[i], rvecs[i], tvecs[i], mtx, dist)
error = cv2.norm(imgpoints[i], imgpoints2, cv2.NORM_L2) / len(imgpoints2)
total_error += error
print(("total error: "), total_error / len(objpoints))
矫正后图像的缩放ROI