目录
非常详细的相机标定原理、步骤(一)_An efforter的博客-CSDN博客_最详细、最完整的相机标定讲解
非常详细的相机标定原理(三)(张正友相机标定法初见和单应性矩阵)_An efforter的博客-CSDN博客 非常详细的相机标定原理(四)(张正友相机标定法数学推导求解)_An efforter的博客-CSDN博客
非常详细的相机标定(五)(相机标定代码讲解)_An efforter的博客-CSDN博客
一、像素坐标系
像素坐标系uov是一个二维直角坐标系,反映了相机CCD/CMOS芯片中像素的排列情况。
原点Oo位于图像的左上角,u轴、v轴分别于像面的两边平行。
像素坐标系中坐标轴的单位是像素(整数)。
根据下面图能够看出来,两种坐标系都是在一个平面上。
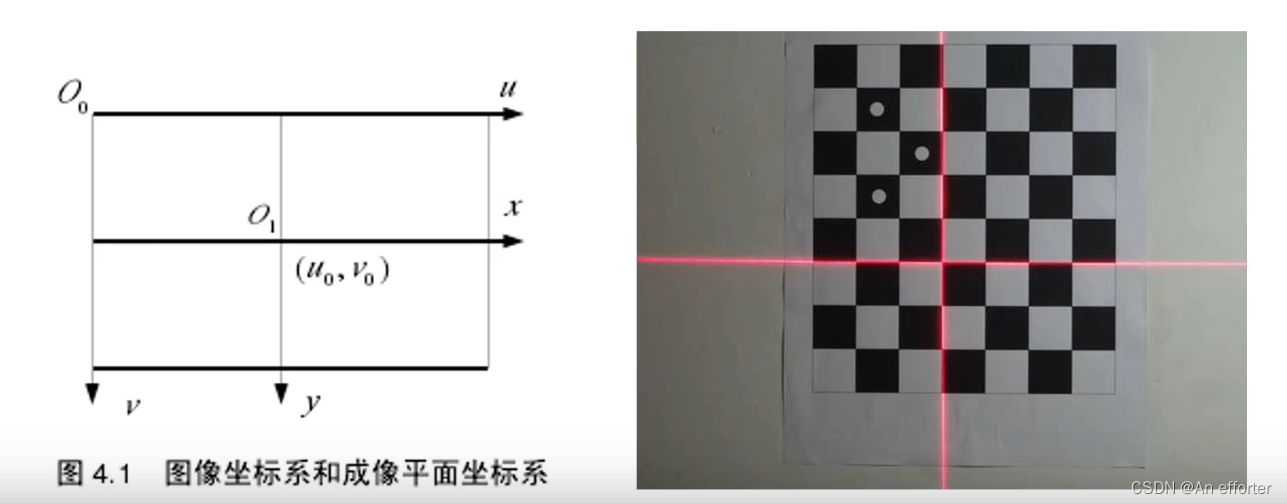
二、图像坐标系
像素坐标系不利于坐标变换,因此需要建立图像坐标系XOY,其坐标轴的单位通常为毫米(mm),原点是相机光轴与相面的交点(称为主点),即图像的中心点。
X轴、Y轴分别与u轴、v轴平行,故两个坐标系实际是平移关系,即可以通过平移就可得到。像素坐标系中坐标轴的单位是像素(整数)。
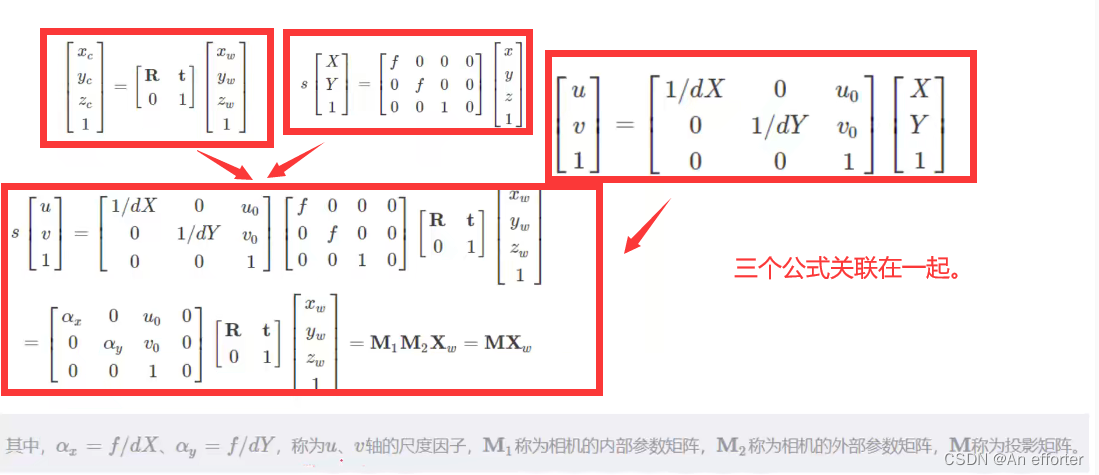
三、图像坐标系转化为像素坐标系
这里不是难点,这里就是二维到二维的转换。

比如说, 求T点,是不是对应的X轴的关系为U = X/dx + Uo,对应的Y轴的关系同理。所以得出上图的那个矩阵。

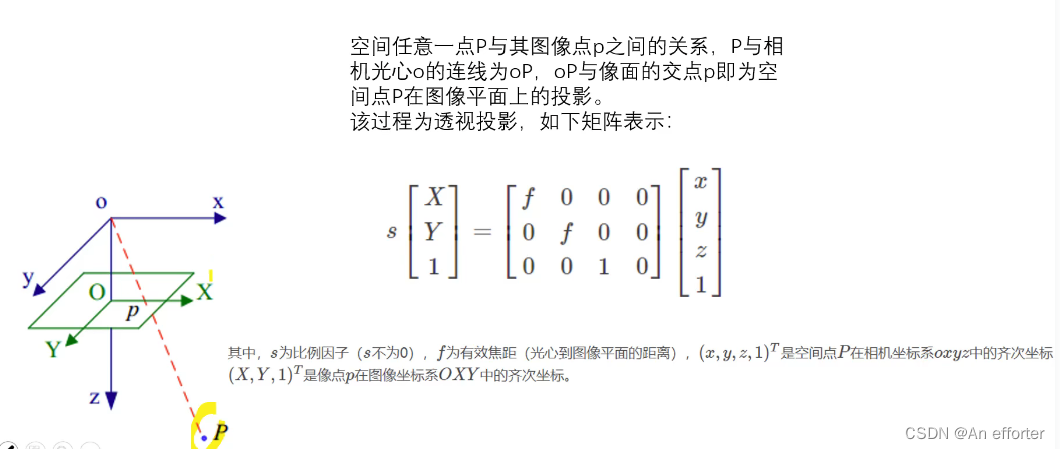
四、相机坐标系转化为图像坐标系(三维转二维)
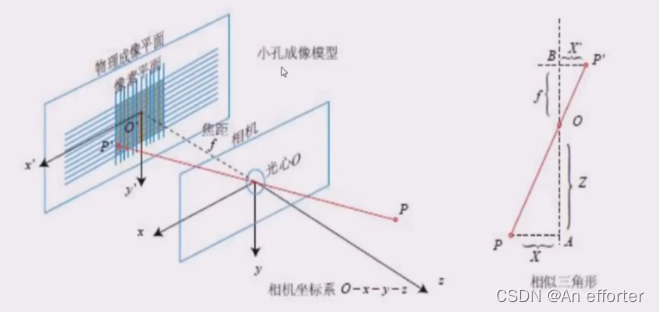
采用的是针孔成像原理,这里还有一个是透视投影的概念,参考一下说明:
为了看的更加仔细,添加了下面的图,但是一定看好,画的成像平面和相机的光心上下位置是不一样的。上面的图光心o在上方,成像在下方,下面的图光心在前,成像在后方,正好能画出相似三角形。上边左边的图换成下边的图。运用相似三角形的原理,得出上图右边的矩阵。
至于为什么要建立这个关系?因为要建立三维转二维的关系,那么Z轴将失去联系,其它的坐标轴都满足s * X = f * x的关系,在对应下面右边的相似三角形,是不是就清楚了。
五、世界坐标系转换为像素坐标系
通过以上说明,可以在世界坐标系与像素坐标系之间得出关系了。
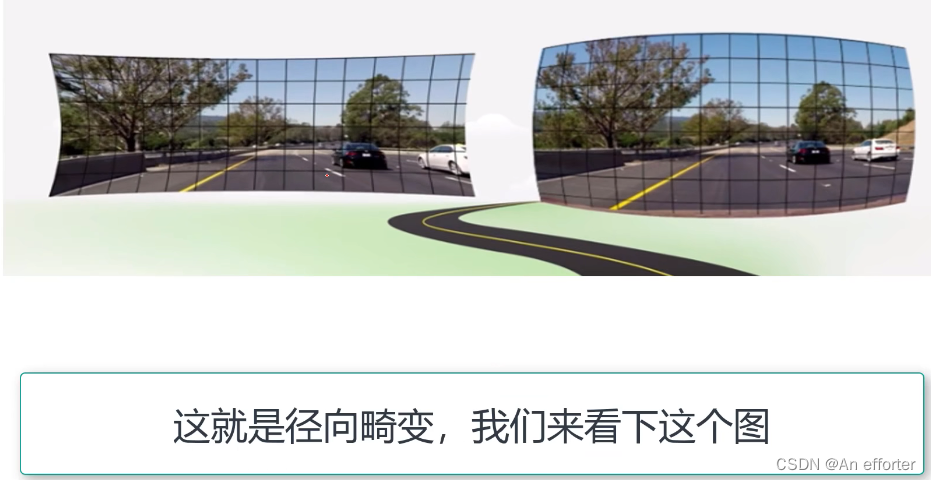
六、畸变参数
畸变―般可以分为:径向畸变、切向畸变
径向畸变来自于透镜形状
切向畸变来自于整个摄像机的组装过程畸变还有其他类型的畸变,但是没有径向畸变、切向畸变显著
结合下图进行参考:

1.径向畸变
- 实际摄像机的透镜总是在成像仪的边缘产生显著的畸变,这种现象来源于“筒形"或“鱼眼”的影响。
- 光线在远离透镜中心的地方比靠近中心的地方更加弯曲。对于常用的普通透镜来说,这种现象更加严重。
对于径向畸变,成像仪中心(光学中心)的畸变为0,随着向边缘移动,畸变越来越严重。
径向畸变有三种 : 桶形畸变 枕形畸变 胡子畸变

2.切向畸变
- 切向畸变是由于透镜制造上的缺陷使得透镜本身与图像平面不平行而产生的。
- 切向畸变可分为:薄透镜畸变、离心畸变
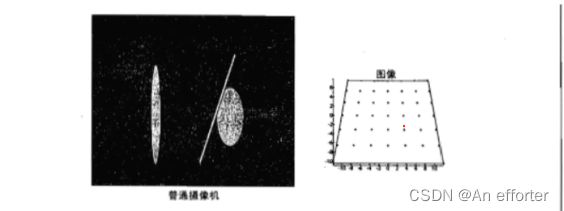
图像像梯形一样发生了扭曲:当透镜不完全平行于图像平面时候产生切向畸变。
3.畸变矫正
