文章目录
前言
最近在学习transformer的知识,看了原论文,以及网上各式各样的材料,综合理解,之后写了这篇博客,这篇博客已经讲的非常非常细致了,因为我用了将近三天的时间,写完的,每一部分都尽可能的描述清楚。本博客只是论文中的模型框架展开分析,并没有对源码进行分析(这也是我下一步要做的),最后也会给出代码的实现。
对Transformer的直观认识
Transformer和LSTM最大区别在于,LSTM的训练是迭代的,是一个接一个字的来,当前这个字过完LSTM单元后在可以进入下一个字,而transformer的训练是并行的,就是所有的字可以全部同时训练的,这样就大大加快了计算效率,transformer使用了位置嵌入positional embedding 来理解语言的顺序,使用自注意力机制和全连接层来进行计算。
论文地址
本篇论文可以点击这里下载。这篇论文是Google于2017年在NIPS上发表的一篇文献,现在用Attention处理序列问题的论文层出不穷,本文的创新点在于抛弃了之前传统的Encoder-Decoder模型必须结合CNN或者RNN的固有模式,只用attention即可,正所谓大道至简。本文的主要目的是减少计算量和提高并行效率的同时,不损害模型效果。(之我见:其实就是摒弃了RNN(无法并行)和CNN(内存占用大,计算量大,参数多)各自的缺点,结合了RNN(保留长距离信息)和CNN(可以并行)各自的优点)。 本文提出了两个新的Attention机制,分别叫做Scaled Dot-Product Attention 和Multi-Head Attention。
模型提出的背景(或者动机)
目前主流的处理序列问题(如机器翻译、文档摘要,对话系统,QA等)大部分都是基于Encoder-Decoder框架(如seq2seq)。即:Encoder:from word sequence to sentence representation;Decoder: from sentence representation to word sequence distribution.传统的Encoder-Decoder一般使用RNN,大部分的神经机器翻译模型都选择使用RNN,但是正如我们所知道的,RNN难以处理长序列的句子,无法实现并行化(由于RNN处理序列的模式),并且面临对齐的问题。
之后这类模型的发展大多熊三个方面着手:
- input的方向性:单向或者双向
- 深度:单层或者多层
- 网络类型:RNN\LSTM\GRU
但是依旧存在一些潜在问题的制约,神经网络需要能够将源语句中所有必要信息压缩成固定长度的向量。这可能是的神经网路难以应付长时间(即长距离)的句子,特别是那些比训练语料库中的句子更长的句子;每个时间步的输出需要依赖于前面时间步的输出,这使得模型没有办法并行,效率低;仍然面临对齐问题。
后来CNN被引入到seq2seq模型中,CNN不能直接用于处理变长的序列样本但是可以实现并行化。完全基于CNN的Seq2seq模型虽然可以并行实现,但是非常占内存,很多的参数,大数据量上对参数进行调整也是不容易的。
Encoder-Decoder模型的主要缺点就是,无论输入如何变化,Encoder给出的都是一个固定维数的向量,存在信息损失;在生成文本的时候,每个词语所用到的语义向量都是一样的,这显然是过于简单的。为了解决上面提到的问题,一种可行的方案是引入attention mechanism。
深度学习里的Attention Model其实模拟的是人脑注意力模型,举个例子来说,
当我们观赏一幅画的时候,虽然我们可以看到整幅画的全貌,但是在我们深入仔细地观察时,
其实眼睛聚焦只有很小的一块,这个时候人的大脑主要关注在这一小块图案上,
也就是说这个时候人脑对整幅画的关注并不是均衡的,是有一定的权重区分的。
这就是深度学习里的Attention Model的核心思想。
所谓注意力就是说,在生成每个词的时候,对不同的输入词给予不同的关注权重。
将注意力加入到Encoder-Decoder中,Encoder不再生成一个固定大小的向量,
而是一个向量序列,并自适应地去选择这些向量的一个子集。
例如,where are you---->你在哪?我们正在翻译“你”的时候,
会给‘you’更多的权重,那么就可以有效解决对齐的问题。
本论文模型—Tranformer
这篇论文首先将注意力机制运用在NLP上,提出了Soft Attention Model,并将其应用到了机器翻译上面。其实,所谓的Soft Attention,是Softmax Attention,意思是在求注意力分配概率分布的时候使用的是softmax函数,对于输入句子中的每一个单词都给出一个概率,是个概率分布。加入注意力机制的模型表现确实更好,但是也存在一定的问题,比如,attention mechanism通常和RNN结合使用,我们都知道RNN依赖于t-1的历史信息来计算t时刻的信息,因此不能并行实现,计算效率比较低,特别是训练样本非常大的时候。
基于CNN的Seq2Seq+attention的优点:基于CNN的Seq2Seq模型具有基于RNN的Seq2seq模型捕捉 long distance dependency的能力,此外,最大的优点是可以并行化实现,效率比基于RNN的seq2seq模型高。缺点是:计算量大,与观测序列X和输出序列Y的长度成正比,参数比较多。
针对以上这两个问题,本文提出了Transformer模型,该模型也是一种Encoder-decoder的框架,只不过该模型完全不依赖于CNN和RNN;完全依赖于self-attention机制(一种堆叠式的self-attention)以及point-wise (逐点计算)的全连接层。
Model Architecture
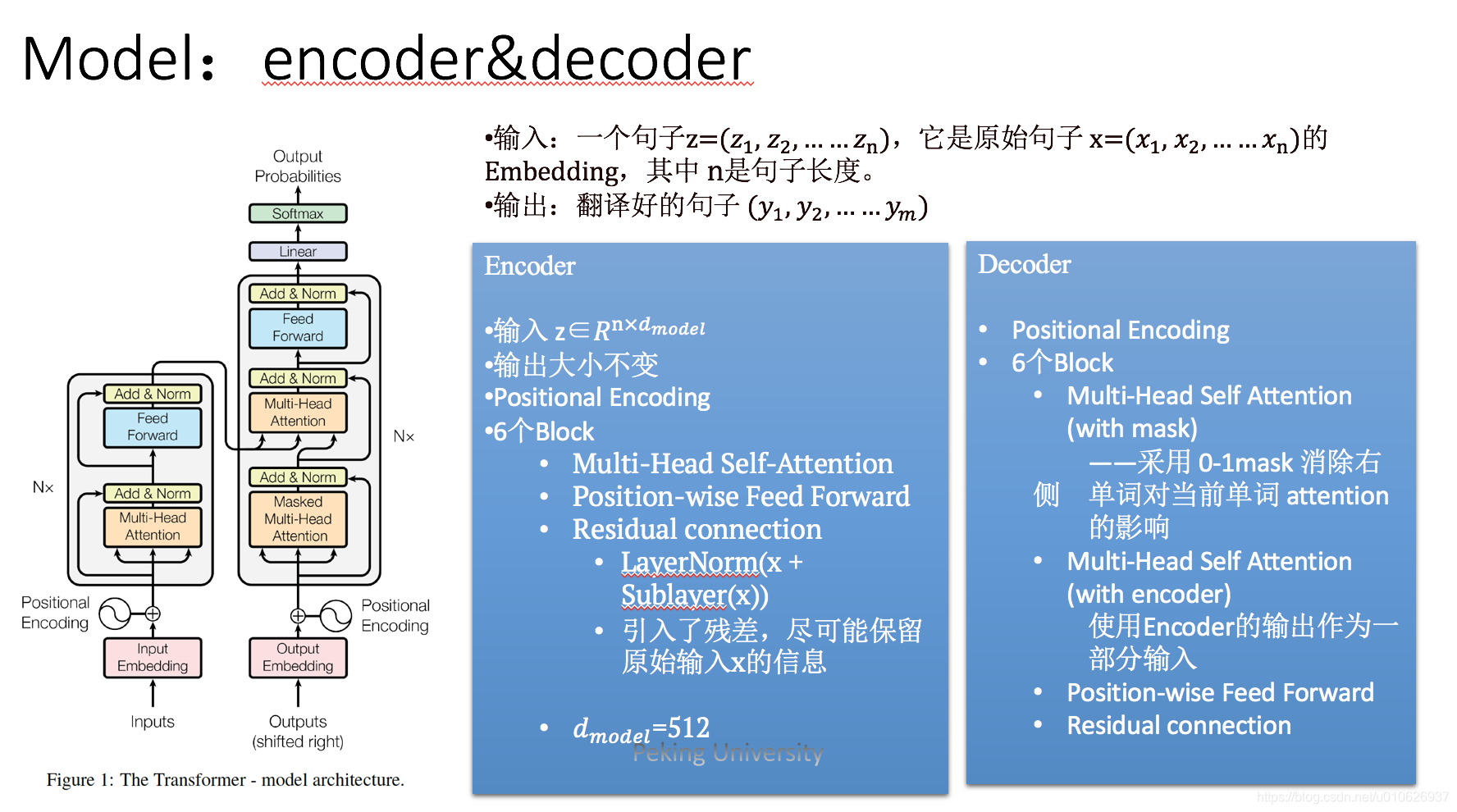
Encoder
Encoder是由N=6个独立的层堆叠而成的,每个层有两个子层:
- 第一个子层为Multi-head self-attention结构
- 第二个子层为simple,position-wise fully connected deed-forward network,即基于位置的简单全连接前馈网络。
每个子层又引入了 residual connection,具体的做法为:每个子层的输出为这个子层的输入和输出相加:
,这就要求每个子层的输入与输出的维度是完全相等的,然后再使用layer normalization,作为最终的输出:
论文中限定了Embedding层的输出和两个子层的输入输出的维度都是
,即上图中的
.
Normalization的作用是将数据归一化为均值位0,方差为1的数据。在把数据送入激活函数之前进行normalization(归一化),因为我们不希望输入数据落在激活函数的饱和区。
residual connection(残差连接)
经过Attention之后的输出维度和输入的嵌入表示维度,即
,相同,也就是
,然后把它们加起来,做残差连接,直接进行元素相加,因为它们的维度是一致的。即,
在之后的运算里,每经过一个模块的运算,都要把运算之前的值和运算之后的值相加(在此,运算即为Attention),从而得到残差连接,训练的时候可以使梯度直接走捷径反传到最初始层(这就是为啥要residual connection,也可以理解为residual connection的作用)residual connection。
Layer Norm
的作用就是把神经网络中隐藏层归一为标准正太分布,也就是独立同分布,以起到加快训练速度,加速收敛的作用,同时也可以避免梯度消失和梯度爆炸的问题,相比Batch Normalization, Layer Normalization更适用于序列化模型比如RNN等,而Batch Normalization则更适用于CNN处理图像。
上式中以矩阵的行
为单位求均值;
上式中以矩阵的行
为单位求方差;
然后用每一行的每一个元素减去这行的均值, 再除以这行的标准差, 从而得到归一化后的数值,
是为了防止除
;
之后引入两个可训练参数
来弥补归一化的过程中损失掉的信息, 注意
表示元素相乘而不是点积, 我们一般初始化
为全
, 而
为全
.
其实,只要把Encoder每个子层都理解清楚了,Decoder的各个层就会很好理解。
Decoder
Decoder也是由N=6个独立的层堆叠而成的,除了与Encoder层中的两个完全相同的子层外,在两层之间又加入了一个multi-head attention,这里是对Encoder的输出作attention处理。
与Encoder相同,每个子层之间也引入了residual connection,并且相加之后使用layer normalization得到每个子层的最后输出。
此外为了防止序列中元素的位置主导输出结果,对Decoder层的multi-head-attention层增加了mask操作,并且结合对output embedding结果进行右移一位的操作,保证了每个位置i的输出,只会依赖于i位之前(不包括i位,因为右移一位和mask)(加入了mask机制, masking 的作用就是防止在训练的时候 使用未来的输出的单词。 比如训练时,第一个单词是不能参考第二个单词的生成结果的。 Masking就会把这个信息变成0, 用来保证预测位置 i 的信息只能基于比 i 小的输出)。
Attention
论文中将常用的Attention结构从新的一种角度进行了描述,Attention作为一种函数,接受的输入为:一个query,一组key-value pairs,三者都是向量;输出就是对组中所有values的加权之和,其中的权值是使 compatibility function(如内积),对组内的每一个keys和query计算得到的。
例如,对于常见的self-attention来说,这里就是指对序列中的某一个元素对应的向量,求得经过self-attention之后的对应的向量。query指的是这个元素对应的向量(例如NLP任务中句子序列中某一个单词对应的embedding向量),key-value Paris就是这个序列的所有元素,其中的每个元素对应的key和value是完全相同的向量,对于要比较的那个元素,与query也是完全相同的。然后使用当前向量和所有向量做内积得到权值,最后的数据就是这个权值和对应向量的加权和。
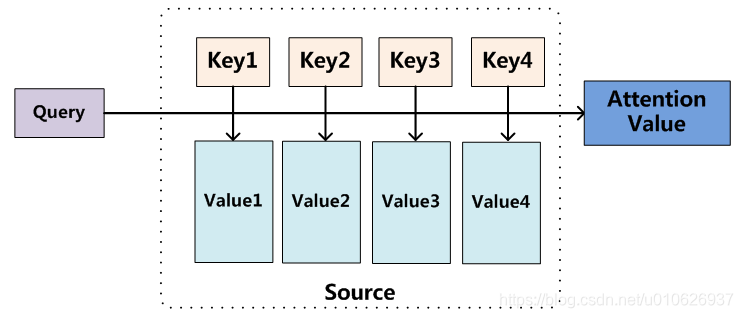
将Source中的构成元素想象成是由一系列的<Key,Value>数据对构成,此时给定Target中的某个元素Query,通过计算Query和各个Key的相似性或者相关性,得到每个Key对应Value的权重系数,然后对Value进行加权求和,即得到了最终的Attention数值。所以本质上Attention机制是对Source中元素的Value值进行加权求和,而Query和Key用来计算对应Value的权重系数。
Self Attention 指的不是Target和Source之间的Attention机制,而是Source内部元素之间或者Target内部元素之间发生的Attention机制,也可以理解为Target=Source这种特殊情况下的注意力计算机制。
在本文中使用了两种Attention方法,分别为Scaled Dot-Product Attention和Multi-Head Attention。
整个模型框架如下所示:
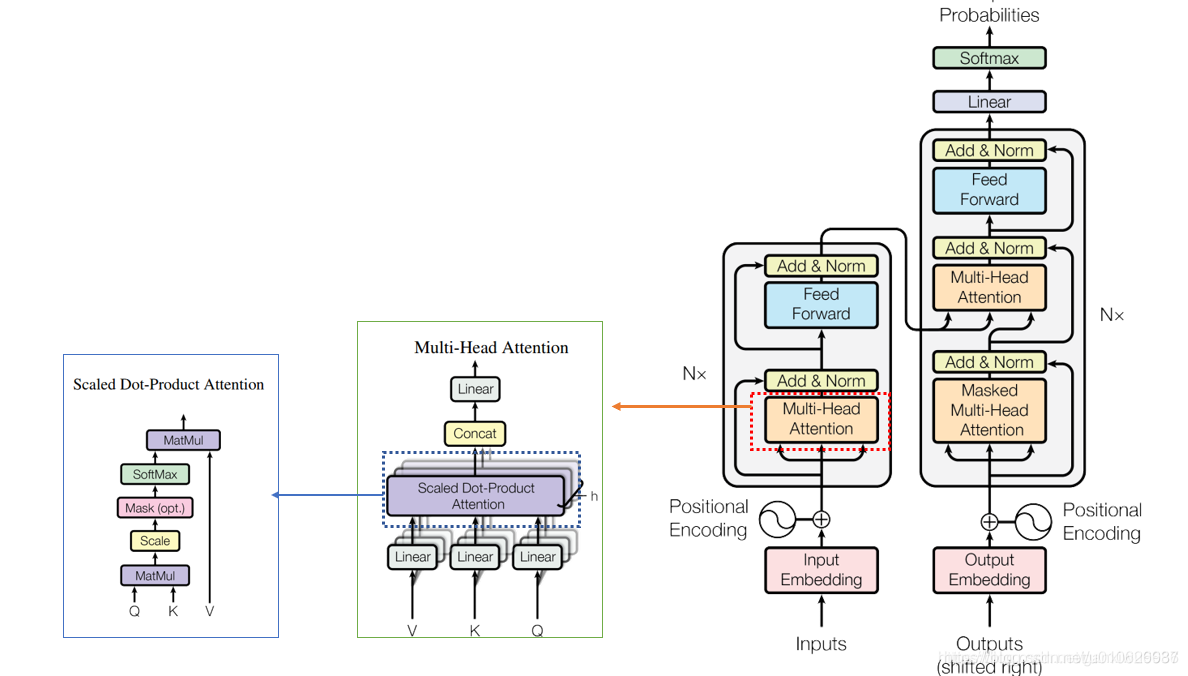
Scaled Dot-Product Attention
我们假设query和key这两个用来比较的向量,长度都为
;value向量的长度为
。对query和所有的key进行点积得到值,再对这个点积结果除以
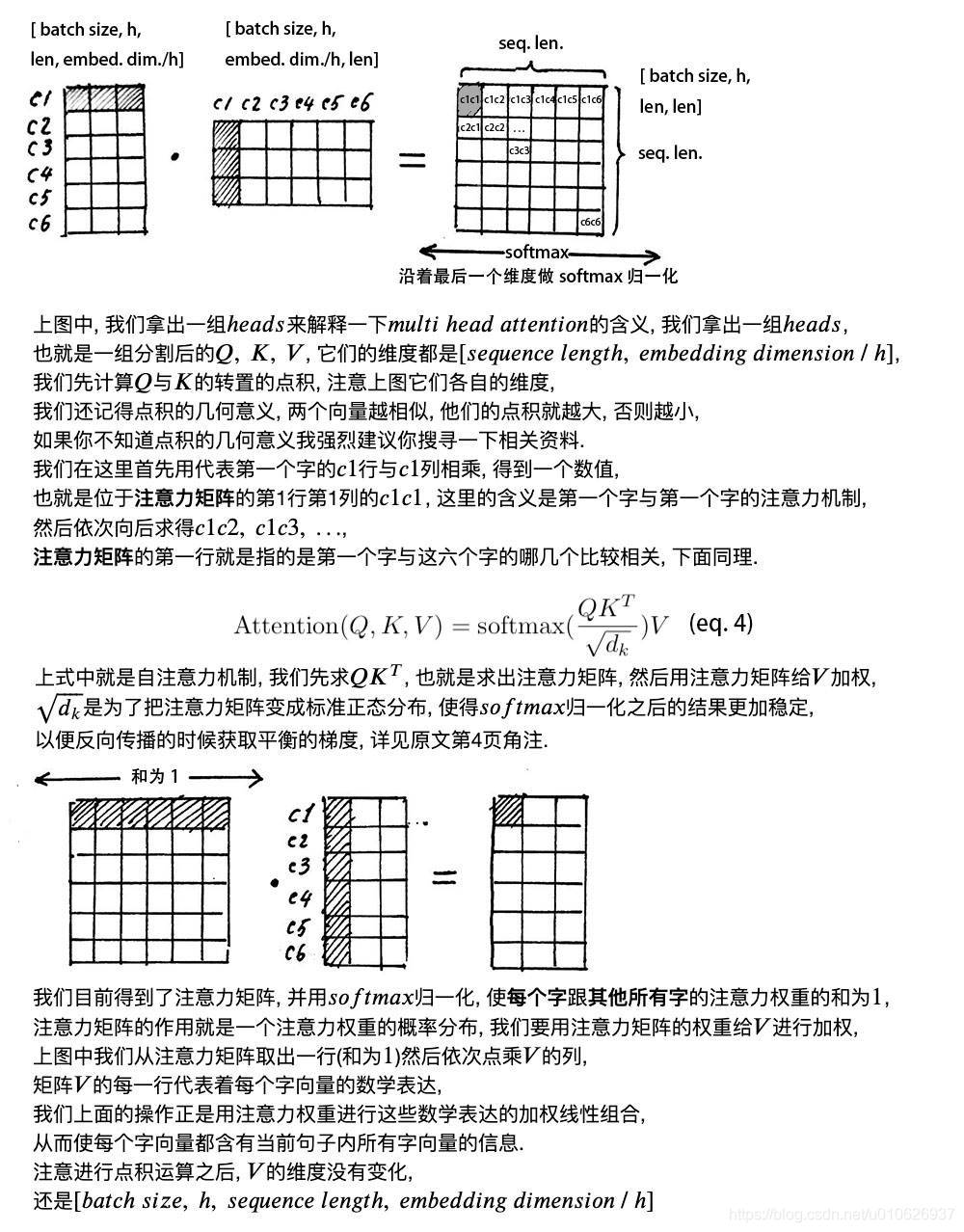
,完成scale,最后应用一个softmax function获得每个value对应的权重(也就说这也是一种soft attention),加权求和求得最后的输出向量。
这是对于一个query的情况,实际中是直接对一个血猎对应的所有querys直接进行计算,将所有querys拼成一个大的Q矩阵,对应的keys和values也拼接成K和V矩阵,则Scaled Dot-Product Attention对应的计算公式为:
需要注意的是:
较大的时候,向量之间的点积结果可能就会非常大,这会造成softmax函数陷入到梯度很小的区域,不利于反向传播的进行,。为了适应这种情况,适应了缩放因子
,对点积结果进行尺度化,将点积结果尽量缩小到梯度敏感的区域内。
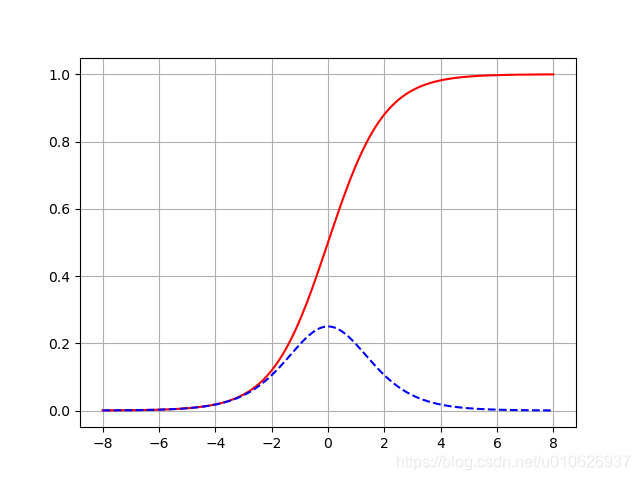
回顾一下sigmod函数的图像,当值大于4的时候,第一就开始变得比较小了。(softmax可以看作是sigmod多分类的一个扩展)
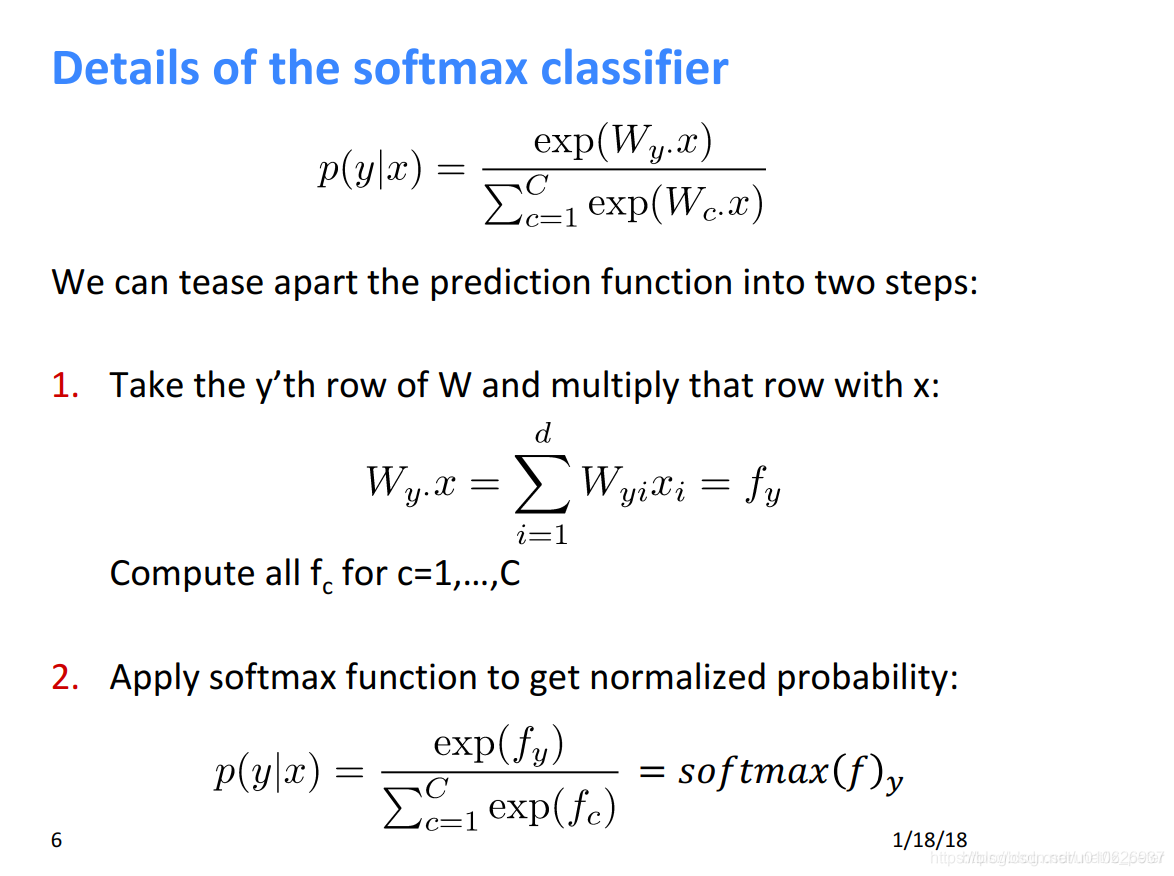
softmax函数的解释如下:
其他关于softmax的知识,可以参考这里或者这里或者直接百度一下。
为什么当
比较大的时候,会导致点积的结果比较大,原论文中是这样解释的:

Multi-Head Attention
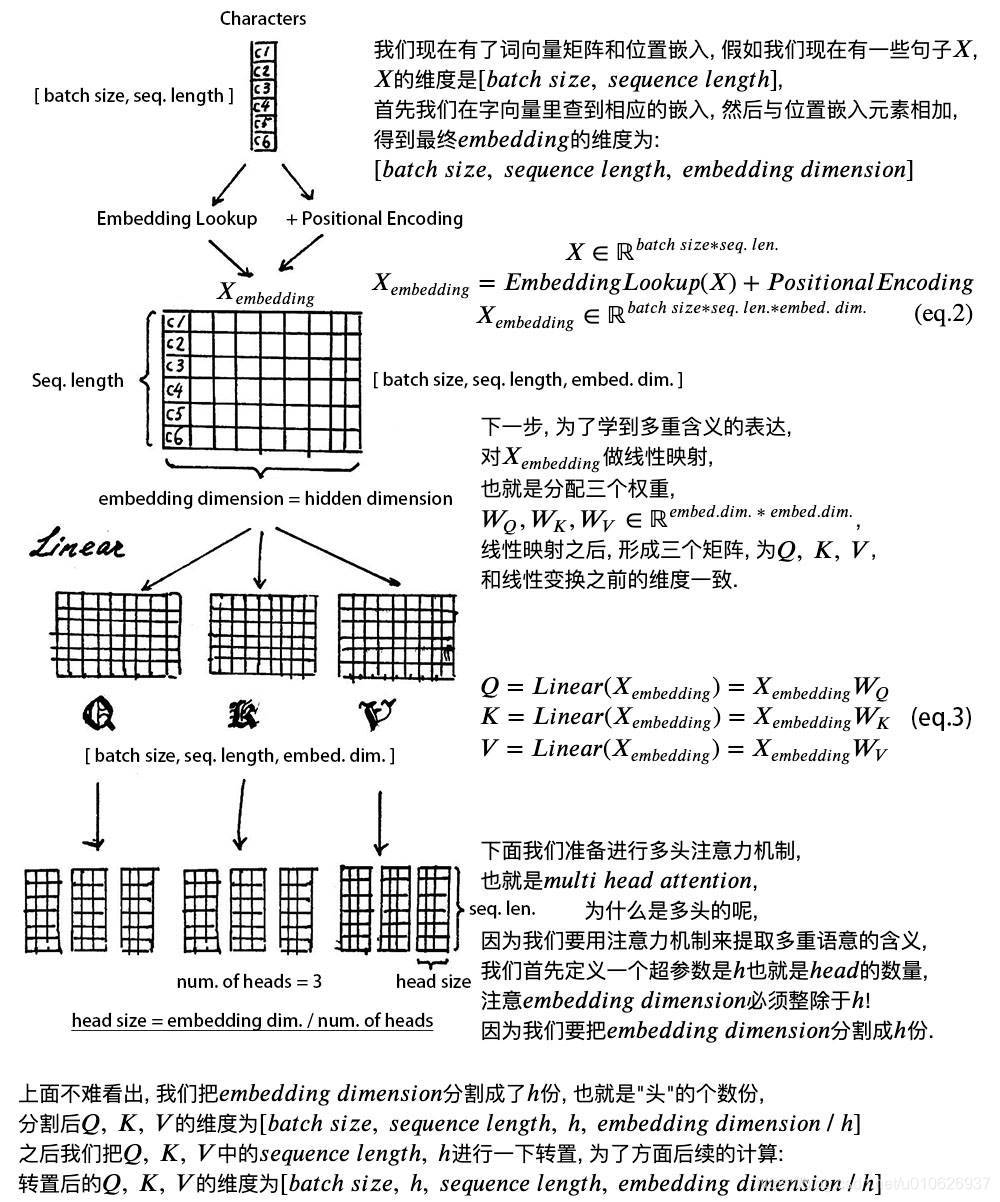
之前的方法都是对 维度的query,keys和value直接只用一个Attention函数。在Multi-Head Attention方法中,进行如此操作:
- 对querys,keys和values都分别进行h次线性映射(类似于SVM中的线性核),得到h组维度分别为 的向量。需要注意的是,这h次映射都是不同的映射,每次线性映射使用的参数是不相同的,而且这个映射是可学习的,相当于得到了h个不同空间(虽然这些空间的维数是相等的)中的表征。
- 然后并行的对这h组维度分别为 的query,keys,和values向量执行Attention函数,每组产生一个, 维的输出结果。
- 最后将这h个维度为 的向量拼接起来
- 通过线性转换还原成
维度向量
公式表示为

都是可学习的线性映射参数。在论文中超参数的选择为h=8,由由于 ,因此 因为对每一个head的将维,总体计算的消耗与直接使用Attention函数的消耗相近。
Transformer中三种multi-head Attention
- encoder-decoder attention层中,即Encoder和Decoder两者之间的Attention中(对应于Decoder结构中第二个Multi-Head Attention子层),querys来自于Decoder结构中上一个子层(即decoder第一个mutli-head子层)的输出,key=value=encoder的输出。这保证了对于Decoder中的每一个位置,都能捕获input sequence各个位置的信息。
- Encoder中对应的 Multi-Head attention,query=key=value=encoder的输入,即对应一个位置上的query、key、value是完全相同的一个向量,保证编码器中的每个位置的输出结果,都可以参考编码器上之前层的所有位置。。
- Decoder中第一个子层 Multi-Head Attention,query=key=value=decoder的输入。因此对于某个位置的元素,会获取序列中所有序列信息,但是为了防止leftward information flow(左侧信息泄露),即防止出现自回归属性,我们对这种Scaled Dot-Product Attention通过mask进行了限制。解释如下:在self-attention的计算过程中,我们通常使用
来计算,也就是一次计算多个序列,即输入
的维度是
, sequence length是句长,而一个 mini batch是由多个不等长的句子组成的,我们就需要按照这个mini batch中最大的句长对剩余的句子进行补齐长度,我们一般就是用0来进行填充,这其实就是
的过程。但是这时再进行
的时候就会产生问题,回顾
函数,
而 ,也就是是有值的,这样的话就说明 中被 的部分就参与了运算,就等于是让无效的部分参与了运算,会产生很大的隐患,这就需要做一个 ,让这些无效区域不参与运算,我们给无效区域加一个很大的负数的偏置,即设置为 。
经过上式的 我们使无效区域经过 计算之后还几乎为 ,这样就避免了无效区域参与运算。
至此,Attention部分已经完全讲完了,下面给出一个直观的解释,帮助理解。
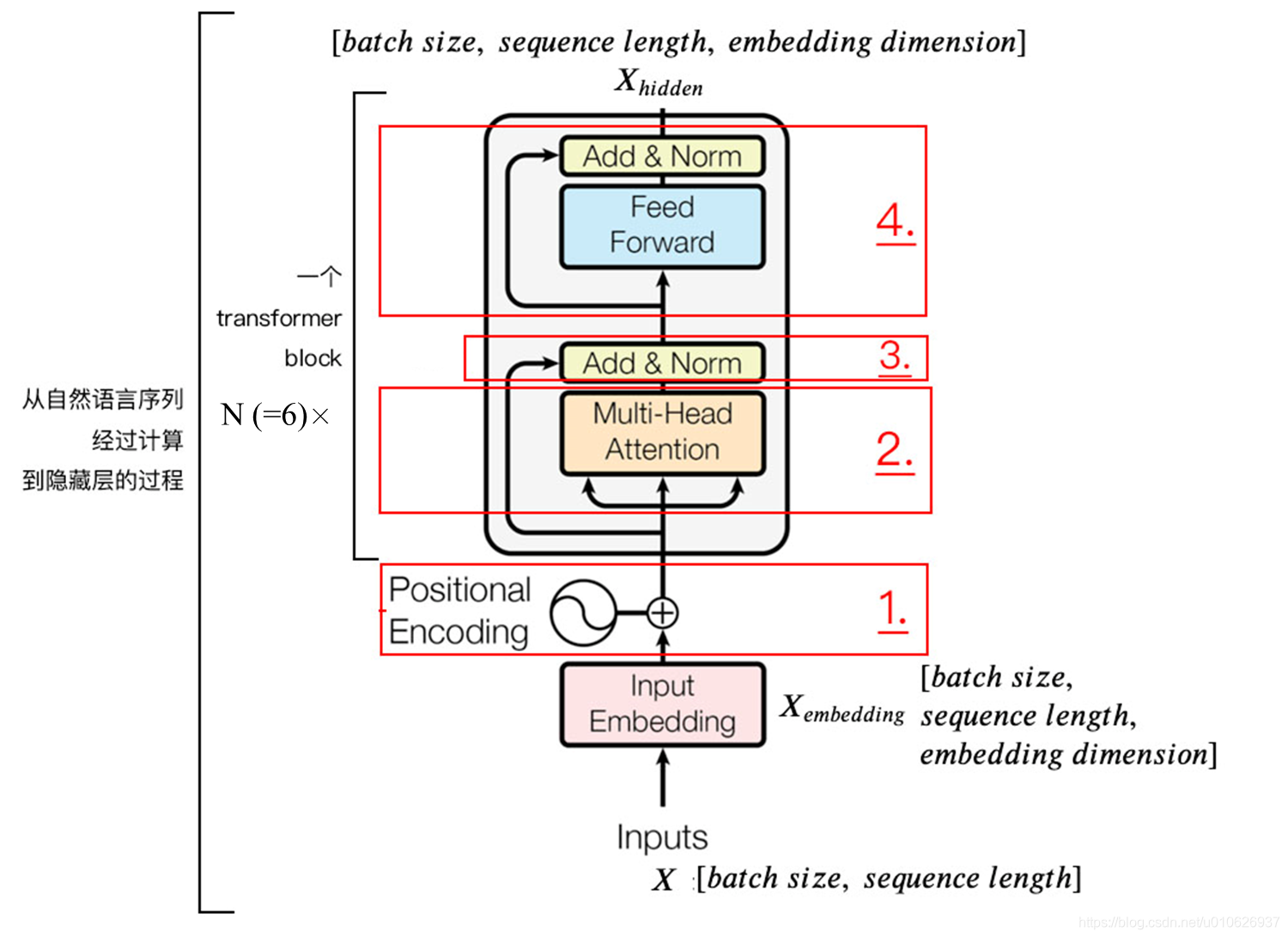
整个Transformer的Encoder整体结构
至此, 我们已经基本了解到
编码器的主要构成部分, 我们下面用公式把一个
的计算过程整理一下:
1). 字向量与位置编码:
2). 自注意力机制:
其实在Encoder中,
那么对
进行线性映射后的
可以写成如下:
然后对线性映射后的
进行Attention:
3). 残差连接与
4). 下面进行
, 其实就是两层线性映射并用激活函数激活, 比如说
:
5). 重复 3)残差连接与
:
令:
在完整的Encoder中,上述步骤的2)~5)要堆叠式的重复6次。
Position-wise Feed-Forward Networks
Encoder 和Decoder都包含了一个fully connected feed-forward network,特殊的是,这个网络分别对每个位置的attention层的输出向量单独地进行作用,整个过程包括了两次线性变换以及一次ReLU激活。
对于不同位置的线性变换是完全一样的,即使使用相同的参数。这一层的输入输出都是
,中间隐层的维度为
。
用了两层Dense层,第二层的activation用的是Relu。可以看成是两层的1*1的1d-convolution。hidden_size变化为:
。
Position-wise feed forward network,其实就是一个MLP 网络,子层的输出中每个
维向量 x 在此先由
变为
维的
,再经过
回归
维。之后再是一个residual connection。输出 size 仍是
Embeddings and Softmax
使用已经训练好的embeddings将input token和output token转换成
维度的向量。在最后Decoder的输出时,将Decoder的输出通过一个线性变换层和一个softmax层,转换成预测下一个token的概率向量,这两个层中参数也是提前训练好的。
在transformer模型中,两个embedding layers以及最后的softmax之前的线性变换,这三者共享使用相同的矩阵权值。对于embedding层,里面的权值需要乘以
之后再使用。
Positional Encoding
因为模型完全没有使用RNN和CNN,而又想使用序列中的顺序信息,就必须加入一些关于token的相对位置和绝对位置的信息。因此我们加入了Positional Encoding,作为Encoder和Decoder的输入。需要注意的是Positional Encoding产生的每个向量维度为 ,与原本的embedding向量维度相同,从而两者可以被相加使用。
实际上,Position Encoding的大小为 ,嵌入的维度同词向量的维度,即等于 , 属于超参数,指的是限定的最大单个句长。
对位置进行embedding的方法有很多,有训练方法和指定方法。在本文中,采用频率不同的sin函数和cos函数。
上述表达式中,pos指的是句中字(或词)的位置,取值范围是
(注意左闭右开),i指的是维度向量的第i维,取值范围是
,上面有
和
一组公式,对应着embedding dimension上的一组奇数和偶数的序号的维度。例如,当i=0的时候
,那么久对应着
这组维度,对于偶数维用
函数,奇数维用
函数,也就是说,第0维用
函数,第1维用
函数,从而产生不同的周期性变化。那么可知
。如下图所示:
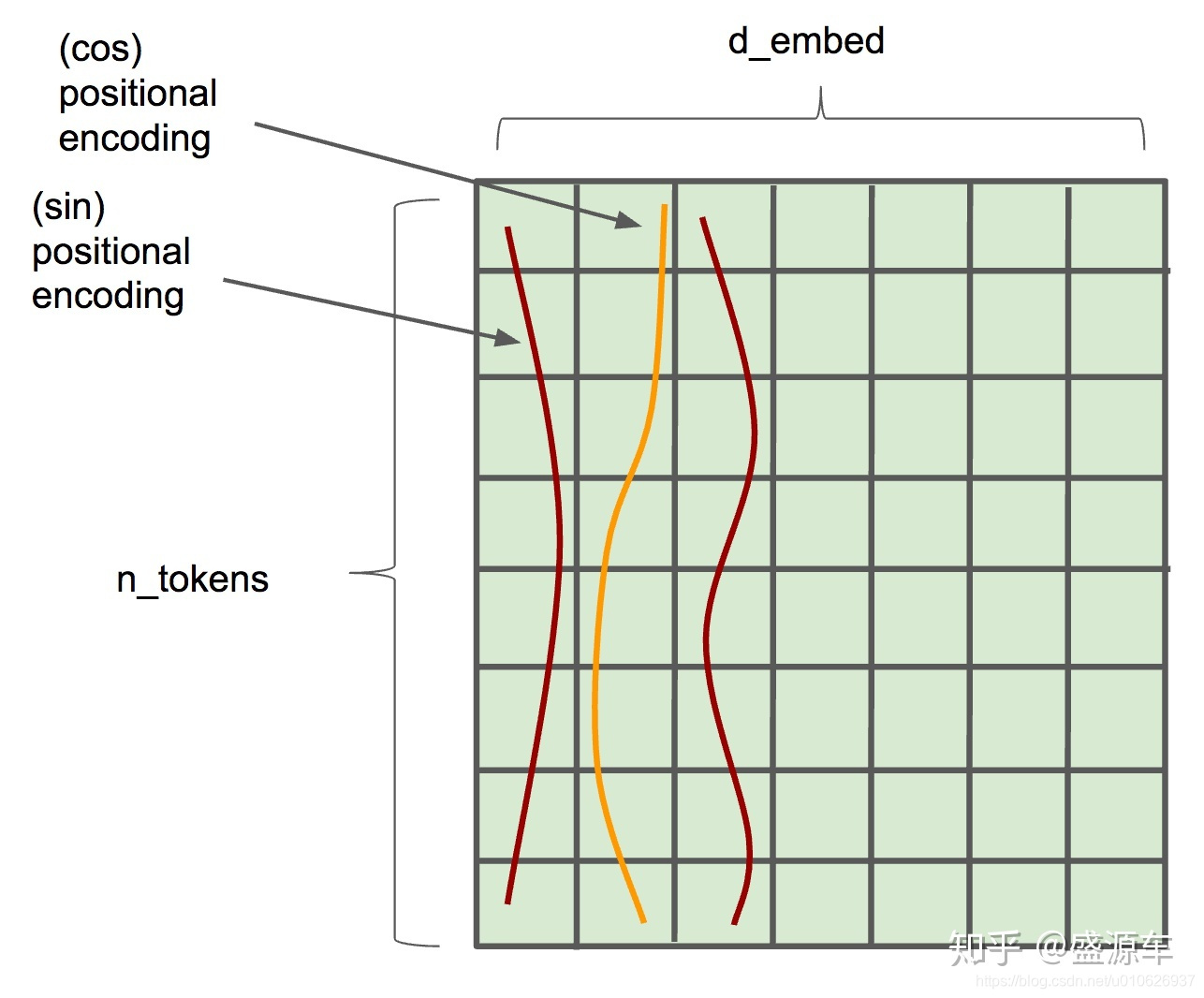
位置嵌入在 embedding dimension维度上随着维度序号的增大,周期会越来越大(从
到
),从而产生一种包含位置信息的纹理。而每一个位置在embedding dimension维度上都会得到不同周期的
和
函数的取值组合,从而产生独一的纹理位置信息,模型从而学到位置之间的依赖关系(函数图像是连续的)和自然语言的时序特性(周期内不同时刻对应于函数图像上不同的位置)。
Position Embedding本身是一个绝对位置信息,由于sin函数和cos函数的特性:
这表明
可以表示为
的线性函数。
why Self-Attention
自注意力机制在论文「A structured Self-Attentive Sentence Embedding」中被首次提出。之所以使用Self-Attention而没有使用循环或者卷积的结构,主要出于以下三点的考虑:
- 每层的计算复杂度
- 计算可以并行的程度
- 对于序列问题,长序列是一个难点。self-attention方法对于长短序列都有比较好的表现。这是我们认为在模型中,前向和后向传播的路径越短,就更容易学习到其中的关系。对于循环和卷积,距离当前较远的位置,在传播过程中都要经过较长的距离。但是对于Self-Attention结构,无论两个元素在序列中相对距离如何,传播的距离总是相等的。
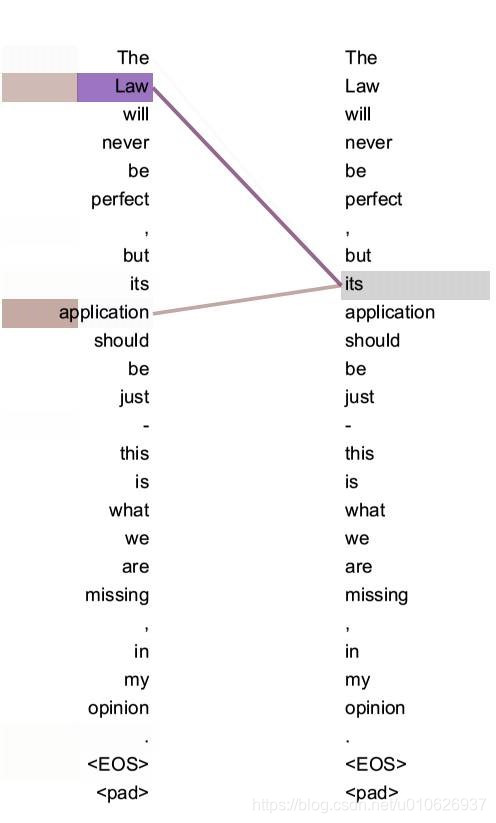
- Self-Attention可以捕获同一个句子中单词之间的句法特征或者语义特征。比如以下两张图:
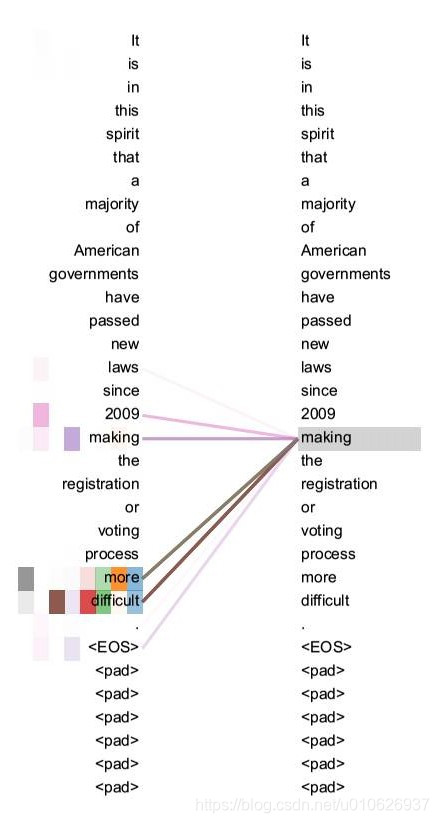
通过第一张图片,可以发现有一定距离的短语结构(句法特征):making sth more difficlut
通过第二张图片,可以发现捕捉语义特征:its的指代对象Law.
很明显通过引入Self-Attention后更容易捕获句子中长距离的相互依赖特征,因为如果是RNN或者CNN,需要依次序序列计算,对于远距离的相互依赖的特征,要经过若干时间步步骤的信息积累才能将两者联系起来,而距离越远,有效捕获的可能性越小。但是Self-Attention在计算过程中会直接将句子中任意两个单词的联系通过一个计算步骤直接联系起来,所以远距离依赖特征之间的距离被极大的缩短,有利于有效地利用这些特征。除此之外,Self Attention 对于增加计算的并行性也有直接帮助作用。这也是为何Self-Attention逐渐被广泛使用的原因。
以上是关于Transformer整个框架的分析,为了后续代码的理解,我们再解释一下,训练模型的时候所采用的Optimizer和Regularization。
Optimizer
Transformer使用Adam optimizer with
,学习率根据下面的计算公式进行变动,现有一个预热,学习率会呈线性增长,然后呈幂函数递减,类似于下图所示。。

论文中设置warmup_steps=4000,也就是说训练的前4000步线性增长,4000步后面成幂函数递减。这么做可以加速模型训练收敛,先以上升的较大的学习率让模型快速落入一个局部收敛较优的状态,然后以较小的学习率微调参数慢慢逼近更优的状态以避免震荡。
Regularization
论文中主要使用了两种正则化手段来避免过拟合并加速训练过程。
Residual Dropout
在每一residual Multi-Head Attention之后, Add & Norm之前进行dropout,以及add(token embedding, positional encoding)之后进行dropout,FFN中没有dropout,base model的dropout rate统一设置为0.1,big model在wmt14 en-fr数据集上设置为0.1, 在en-de数据集上设置为0.3.
Label smothing
Label Smothing Regularization(LSR)是2015年发表在CoRR的paper:Rethinking the inception architecture for computer vision中的一个idea,这个idea简单又实用。假设数据样本x的针对label条件概率的真实分布为:
这使得模型对自己给出的预测太过自信,容易导致过拟合并且自适应能力差(easy cause overfit and hard to adapt)。解决方案是:给label分布加入平滑分布
,一般取平均分布
就可以,于是得到:
映射到损失函数 cross entropy有:
由上式可以知道,LSR使得不仅要最小化原来的交叉熵
,还要考虑预测分布p与
之间差异最小化,使得模型预测泛化能力更好。transformer的论文指定
。
下表是使用LSR和未使用LSR在tensorflow datasets的ted_hrlr_translate/pt_to_en dataset上bleu score对比
| bleu on validation dataset | bleu on test dataset | |
|---|---|---|
| beam_search | 41.5 | 42.0 |
| beam_search + label_smooth_regualrization | 47.3 | 46.8 |
可以看到使用了LSR在验证集和测试集上都取得了比更好的bleu score.但是LSR对perplexity不利,因为模型的学习目标变得更不确切了。
代码
参考文献
[阅读笔记]《Attention is All You Need》
本文相当一部分的内容来自于词。
-《Attention is All You Need》论文翻译
本文算是对原论文的一个翻译,帮助阅读论文。
-深度学习中的“注意力机制”
本文也算是对原论文一个翻译,用来辅助读原论文。
-Transformer 详解
本文有一部内容也参考此处。
