基础:平面方程
在空间坐标系内,平面的方程均可用三元一次方程Ax+By+Cz+D=0来表示。
一、截距式
二、点法式
n为平面的法向量,
n=(A,B,C),M,M'为平面上任意两点,
则有n·MM'=0,
MM'=(x-x0,y-y0,z-z0),
 从而得平面的点法式方程:
A(x-x0)+B(y-y0)+C(z-z0)=0 [1]
从而得平面的点法式方程:
A(x-x0)+B(y-y0)+C(z-z0)=0 [1]
两平面互相垂直相当于A1A2+B1B2+C1C2=0
两平面平行或重合相当于A1/A2=B1/B2=C1/C2
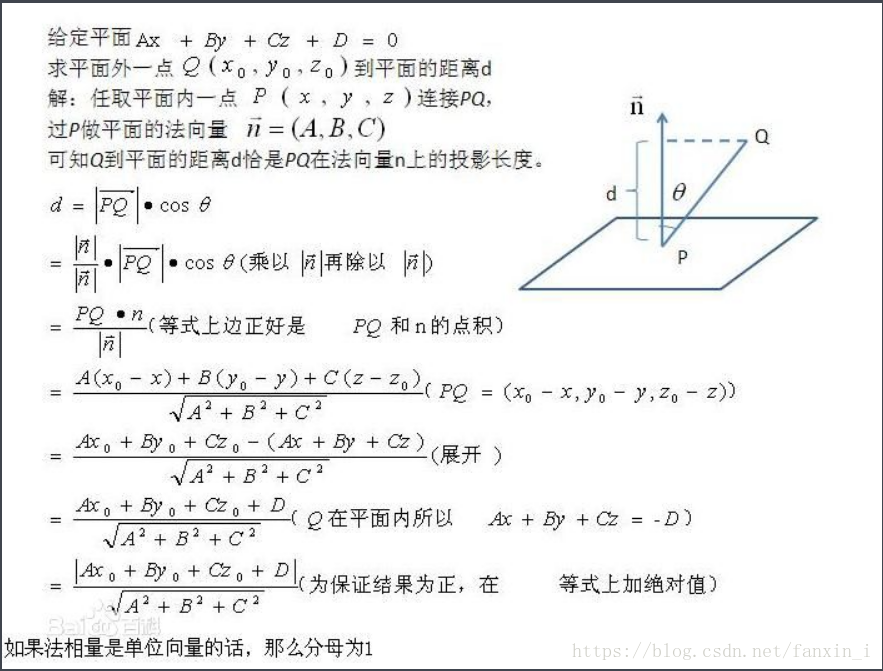
点到平面的距离=abs(Ax0+By0+Cz0+D)/sqrt(A^2+B^2+C^2) 求解过程:面内外两点连线在法向量上的映射Prj(小n)(带箭头P1P0)=数量积
点到平面距离的证明过程:
三、一般式
四、法线式
支持向量机
1.基础概要
支持向量机(support Vector Machine,SVN)是一种有监督的分类算法,通过探求风险最小来提高学习机的泛化能力,实现经验风险和置信范围的最小化。
求解目标:求得一个最优超平面
其中W是超平面的法向量,决定了超平面的方向,b是位移项,决定了超平面到原点的距离。显然,超平面可以被W和b确定。样本空间任意一点到超平面的距离为W*X+B/||W||(点到距离的公式前面已经证明了)

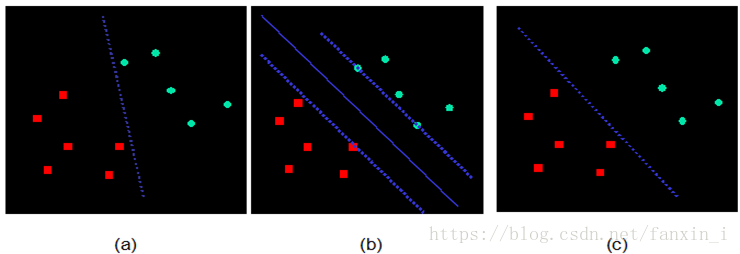
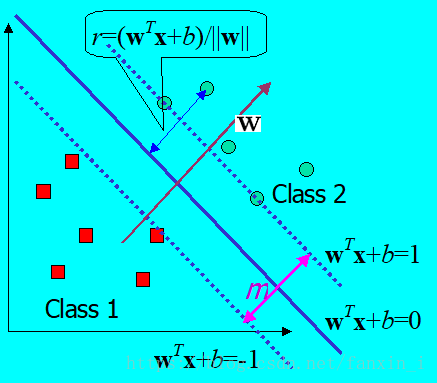
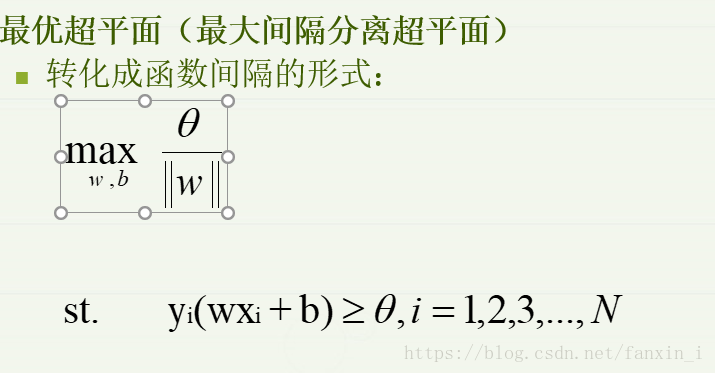
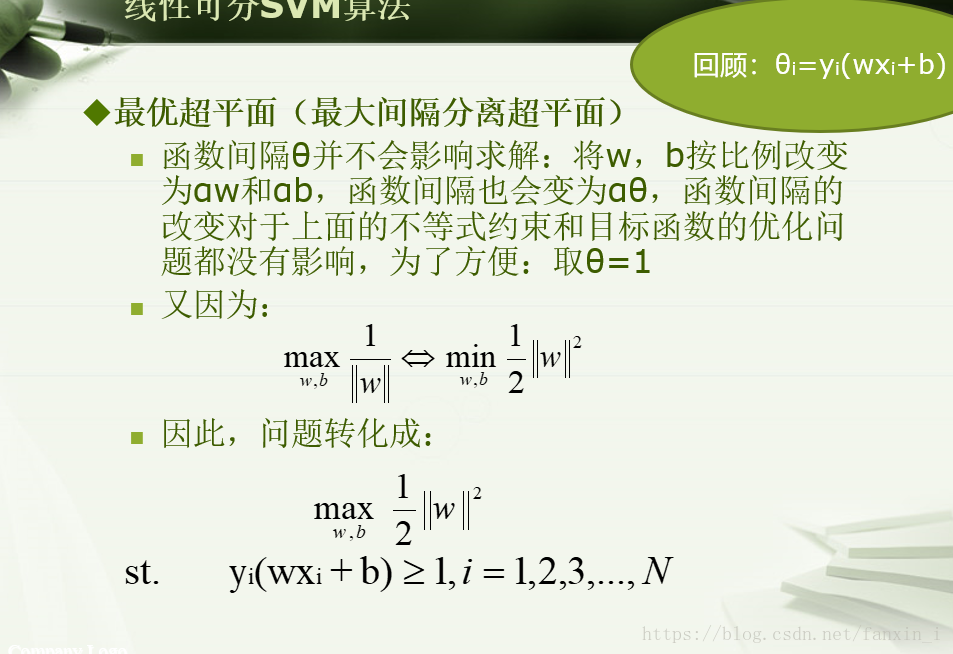
如何求最优超平面(最大间隔分离超平面)?

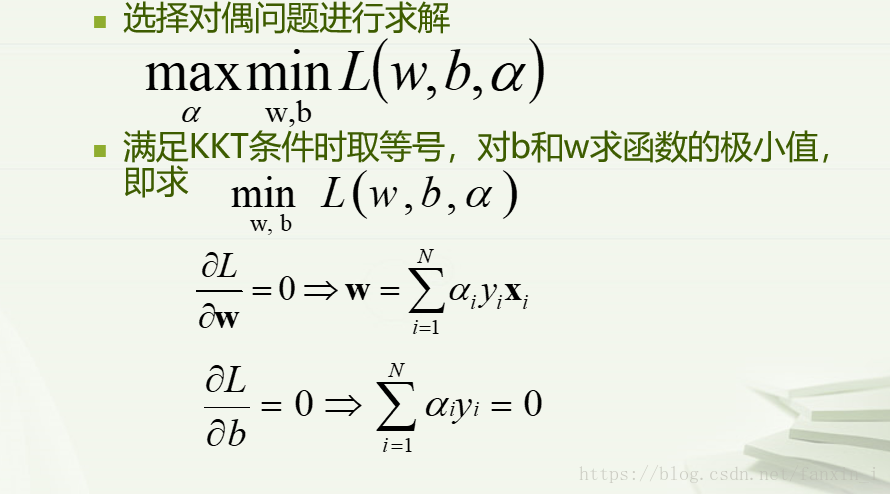
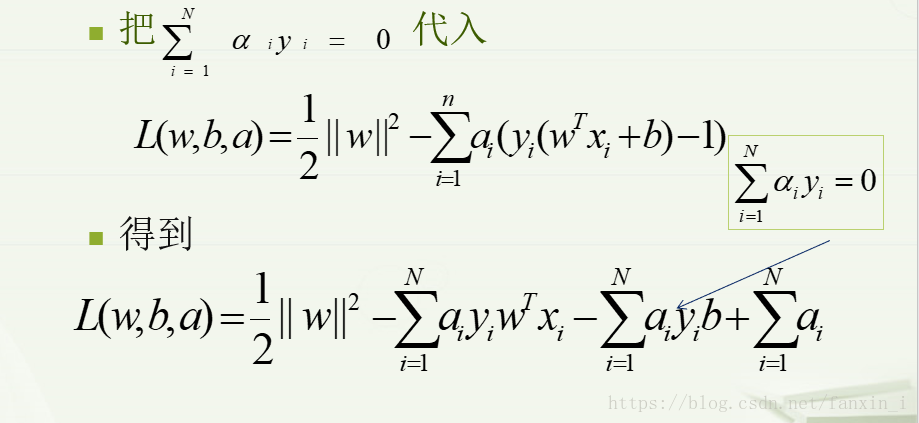
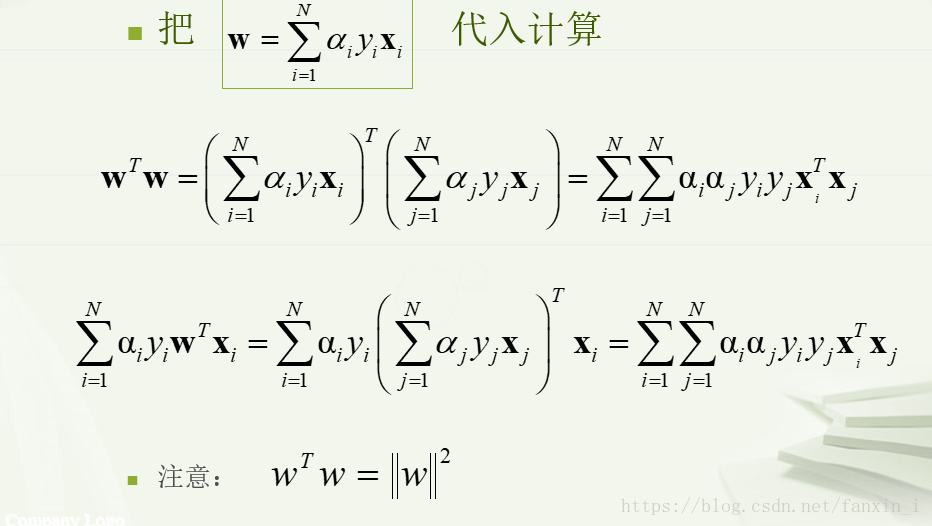
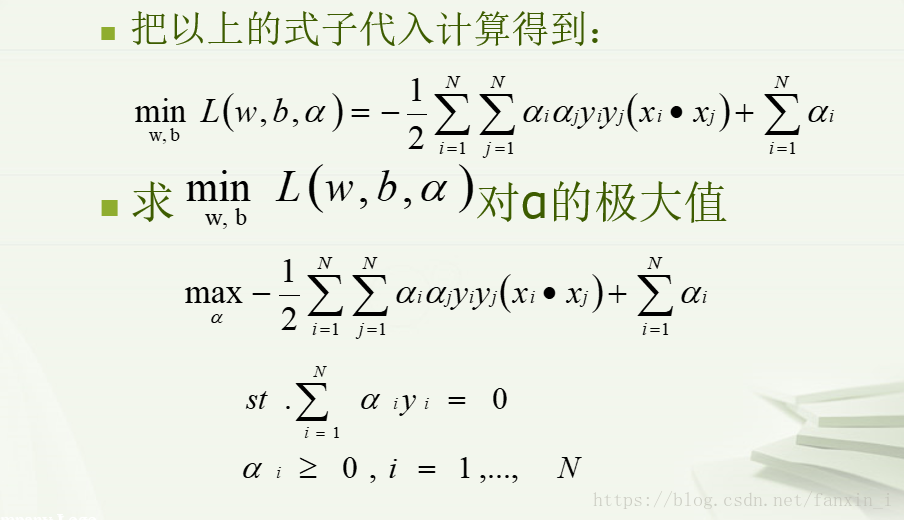
基于目标函数和约束条件,定义拉格朗日函数: