支持向量机SVM(Support Vector Machine)
【关键词】支持向量,最大几何间隔,拉格朗日乘子法
一、支持向量机的原理
Support Vector Machine。支持向量机,其含义是通过支持向量运算的分类器。其中“机”的意思是机器,可以理解为分类器。
那么什么是支持向量呢?在求解的过程中,会发现只根据部分数据就可以确定分类器,这些数据称为支持向量。
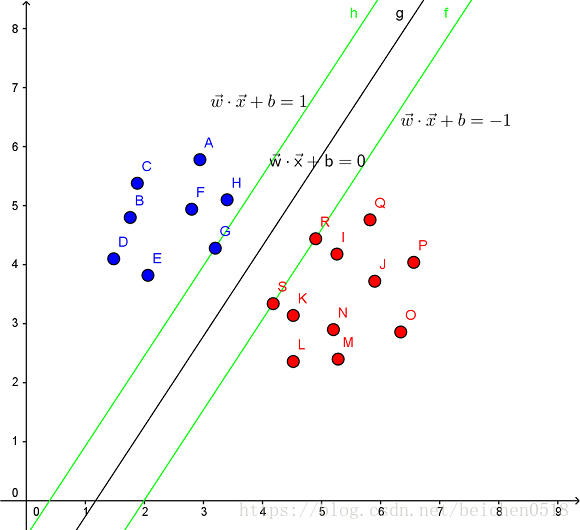
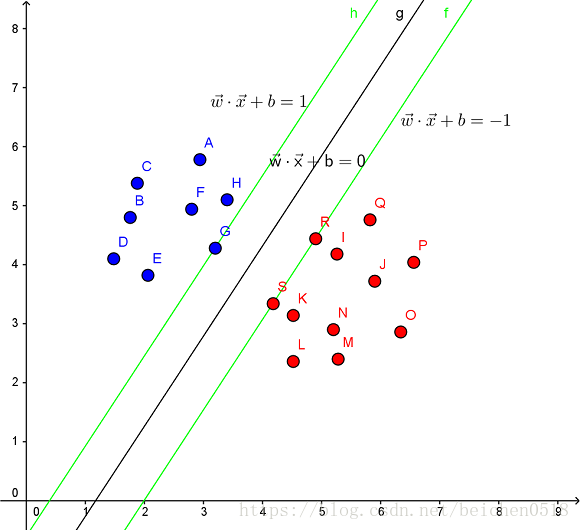
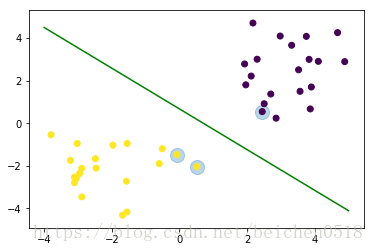
见下图,在一个二维环境中,其中点R,S,G点和其它靠近中间黑线的点可以看作为支持向量,它们可以决定分类器,也就是黑线的具体参数。
解决的问题:
- 线性分类
在训练数据中,每个数据都有n个的属性和一个二类类别标志,我们可以认为这些数据在一个n维空间里。我们的目标是找到一个n-1维的超平面(hyperplane),这个超平面可以将数据分成两部分,每部分数据都属于同一个类别。
其实这样的超平面有很多,我们要找到一个最佳的。因此,增加一个约束条件:这个超平面到每边最近数据点的距离是最大的。也成为最大间隔超平面(maximum-margin hyperplane)。这个分类器也成为最大间隔分类器(maximum-margin classifier)。
支持向量机是一个二类分类器。
- 非线性分类
SVM的一个优势是支持非线性分类。它结合使用拉格朗日乘子法和KKT条件,以及核函数可以产生非线性分类器。
SVM的目的是要找到一个线性分类的最佳超平面 f(x)=xw+b=0。求 w 和 b。
首先通过两个分类的最近点,找到f(x)的约束条件。
有了约束条件,就可以通过拉格朗日乘子法和KKT条件来求解,这时,问题变成了求拉格朗日乘子αi 和 b。
对于异常点的情况,加入松弛变量ξ来处理。
非线性分类的问题:映射到高维度、使用核函数。
线性分类及其约束条件
SVM的解决问题的思路是找到离超平面的最近点,通过其约束条件求出最优解。
最大几何间隔(geometrical margin)
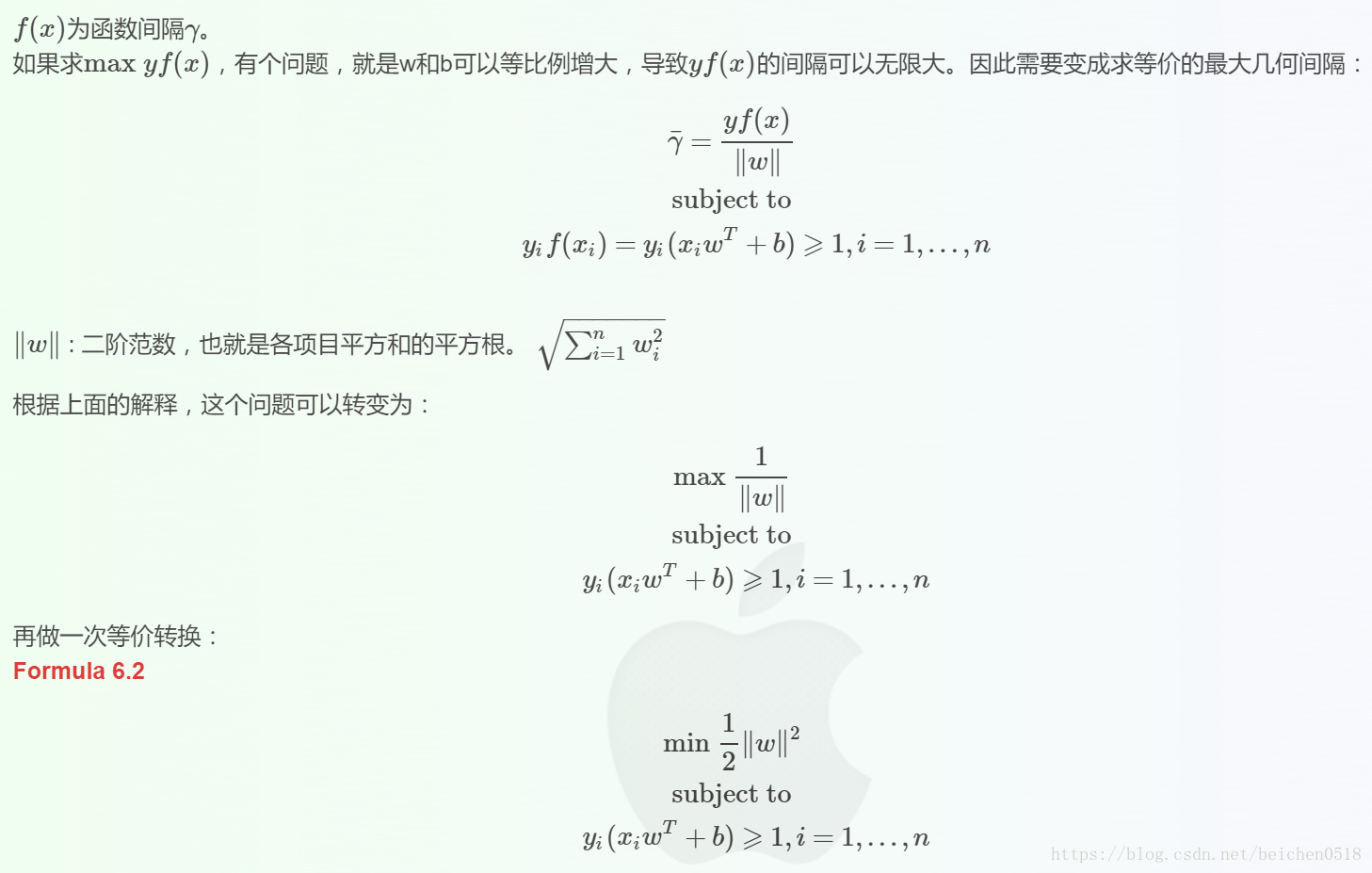
求解问题w,b
我们使用拉格朗日乘子法(http://blog.csdn.net/on2way/article/details/47729419)
来求w和b,一个重要原因是使用拉格朗日乘子法后,还可以解决非线性划分问题。
拉格朗日乘子法可以解决下面这个问题:
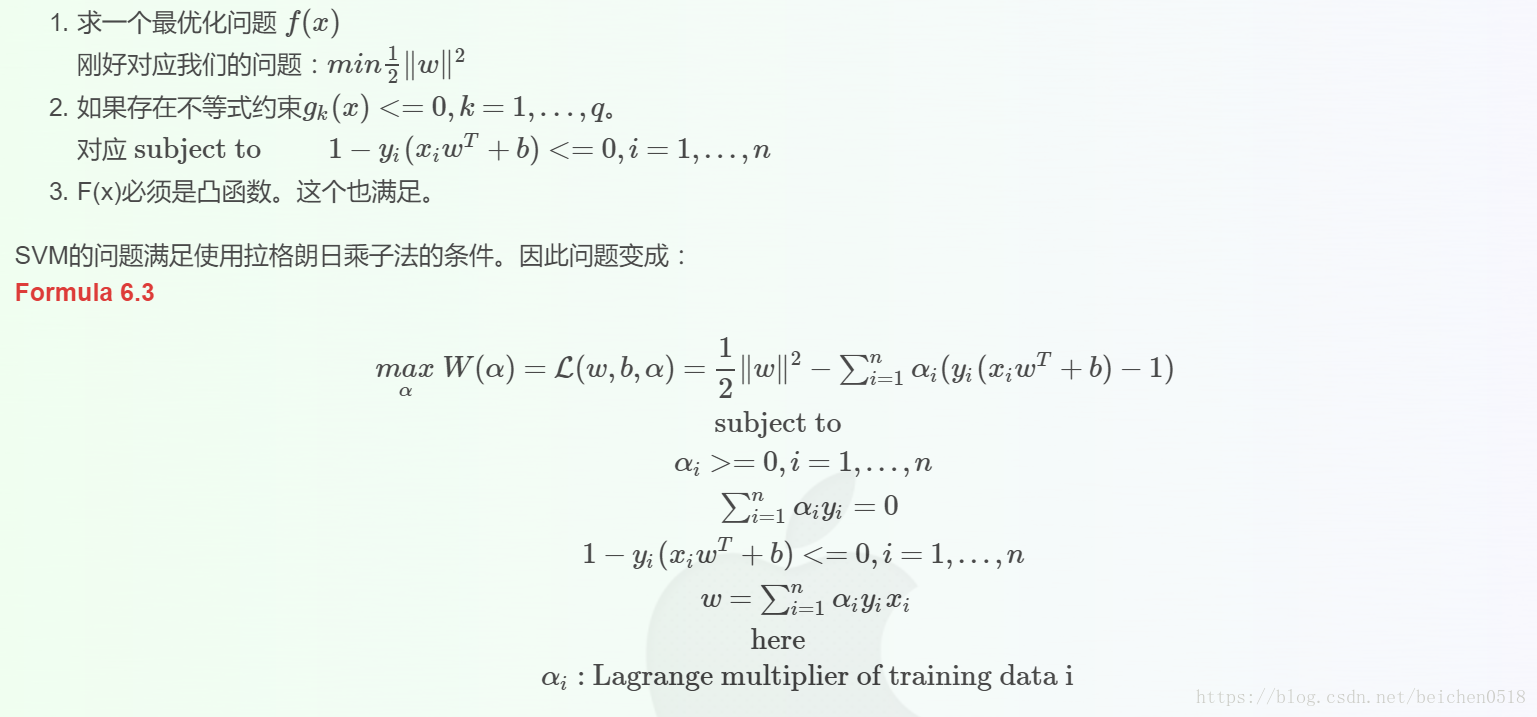
消除w之后变为:
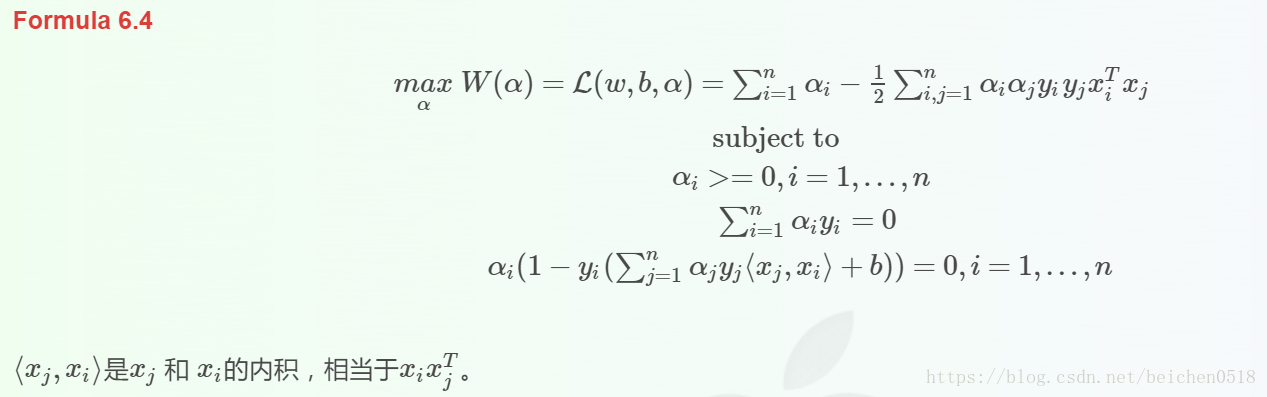
可见使用拉格朗日乘子法后,求w,b的问题变成了求拉格朗日乘子αi和b的问题。
到后面更有趣,变成了不求w了,因为αi可以直接使用到分类器中去,并且可以使用αi支持非线性的情况.
二、实战
1、画出决策边界
导包sklearn.svm
# SVC用于分类
from sklearn.svm import SVC
import numpy as np
import matplotlib.pyplot as plt随机生成数据,并且进行训练np.r_[]
#画二维的点,特征只有两个
# 两簇点
dot1 = np.random.randn(20, 2) - [2, 2]
dot2 = np.random.randn(20, 2) + [3, 2]
# 将两簇点行级联
dot = np.concatenate([dot1, dot2])
dot.shape输出
(40, 2)
# 两类点分类
target = [0] * 20 + [-1] * 20
训练模型,并训练
# It must be one of 'linear', 'poly', 'rbf', 'sigmoid', 'precomputed' or a callable.
# kernel 核心 linear 线性 poly 多项式 rbf基于半径的
svc = SVC(kernel= 'linear')X_train = dot
y_train = targetsvc.fit(X_train, y_train)输出
SVC(C=1.0, cache_size=200, class_weight=None, coef0=0.0,
decision_function_shape=’ovr’, degree=3, gamma=’auto’, kernel=’linear’,
max_iter=-1, probability=False, random_state=None, shrinking=True,
tol=0.001, verbose=False)
提取系数获取斜率
X_train.shape输出
(40, 2)
coef_ = svc.coef_线性方程的截距
b = svc.intercept_# f(x, y) = w1 * x + w2 * y + b# 支持 向量 一般是3个 有的时候是两个
support_vectors_ = svc.support_vectors_
support_vectors_ 输出
array([[ 2.4481023 , 0.54268437],
[ 0.51456029, -2.03510616],
[-0.0747407 , -1.47089428]])
# 把支持向量的点给找出来
plt.scatter(support_vectors_[:,0], support_vectors_[:,1], s=200, alpha=0.3)
plt.scatter(dot[:,0], dot[:,1], c=target)<matplotlib.collections.PathCollection at 0x12864e48>

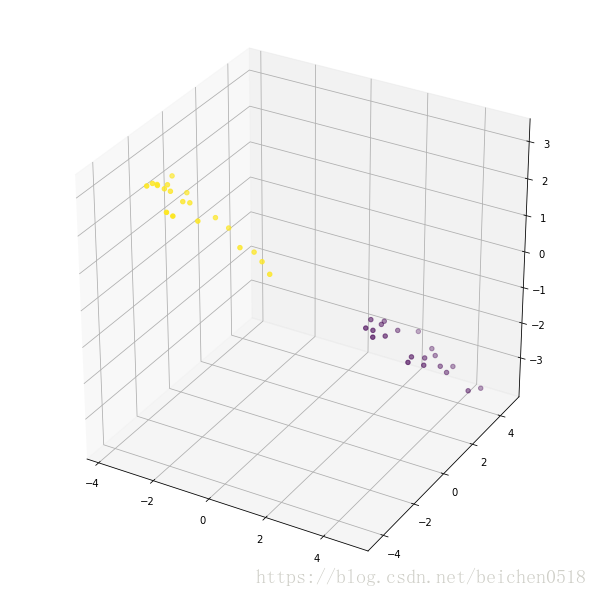
# 3 维度的图形
from mpl_toolkits.mplot3d import Axes3DX_train() 40, 2
2 个属性 0 代表x 1 代表y
coef[0,0]代表w1
coef[0,1]代表w2
b截距
三维降二维
f(x,y) = w1 * x + w2 * y + b
0 = w1 * x + w2 * y + b
y = -coef_[0,0]/coef_[0,1] * x - b /coef_[0,1]
# 二维中的分类线
# y = wx + b
w = -coef_[0,0]/coef_[0,1]
b_ = - b /coef_[0,1]
# 线生成一个范围
x = np.linspace(-4, 5, 100)
y = w * x + b_# 画一个分类线
plt.plot(x, y, c='g')
plt.scatter(support_vectors_[:,0], support_vectors_[:,1], s=200, alpha=0.3)
plt.scatter(dot[:,0], dot[:,1], c=target)<matplotlib.collections.PathCollection at 0x128c00b8>
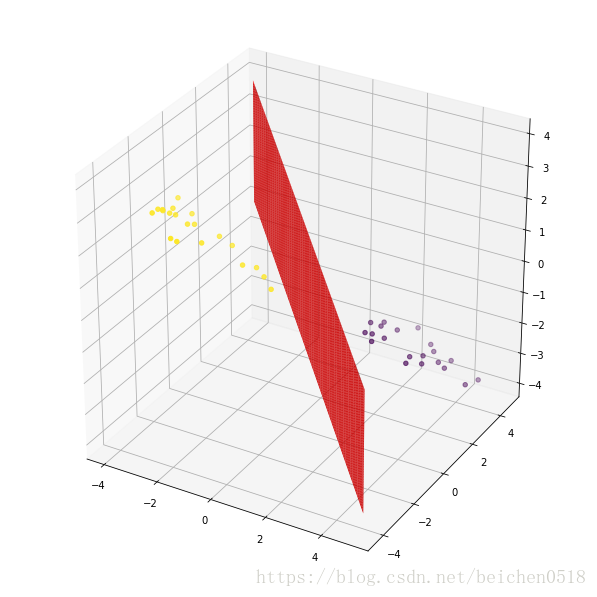
# x, y, z
# f(x, y) = w1 * x + w2 * y +b
x1 = dot[:,0]
y1 = dot[:,1]
w1 = coef_[0,0]
w2 = coef_[0,1]
z1 = w1 * x1 + w2 * y1 + b
fig = plt.figure(figsize=(8, 8))
axes3D = Axes3D(fig)
axes3D.scatter(x1, y1, z1,c=y_train)
<mpl_toolkits.mplot3d.art3d.Path3DCollection at 0xc44f9e8>
a1, b1 = np.meshgrid(x, y)
z2 = w1 * a1 + w2 * b1 + b
fig = plt.figure(figsize=(8, 8))
axes3D = Axes3D(fig)
axes3D.scatter(x1, y1, z1,c=y_train)
axes3D.plot_surface(x, y, z2, color='red')<mpl_toolkits.mplot3d.art3d.Poly3DCollection at 0x1336d7b8>
a1array([[-4. , -3.90909091, -3.81818182, ..., 4.81818182,
4.90909091, 5. ],
[-4. , -3.90909091, -3.81818182, ..., 4.81818182,
4.90909091, 5. ],
[-4. , -3.90909091, -3.81818182, ..., 4.81818182,
4.90909091, 5. ],
...,
[-4. , -3.90909091, -3.81818182, ..., 4.81818182,
4.90909091, 5. ],
[-4. , -3.90909091, -3.81818182, ..., 4.81818182,
4.90909091, 5. ],
[-4. , -3.90909091, -3.81818182, ..., 4.81818182,
4.90909091, 5. ]])
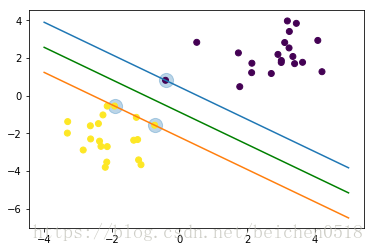
上边界和下边界
support_vectors_
# 需要支持的三点
support_vectors_输出
array([[-0.4115882 , 0.81065679],
[-1.91821725, -0.55639636],
[-0.73355567, -1.57297753]])
# 上面的一个点先取出来
vector_up = support_vectors_[0]
vector_down = support_vectors_[-1]绘制图形
# 上面的点
y_up = w * x + vector_up[1] - w * vector_up[0]
y_down = w * x + vector_down[1] - w * vector_down[0]
plt.scatter(support_vectors_[:,0], support_vectors_[:,1], s=200, alpha=0.3)
plt.scatter(dot[:,0], dot[:,1], c=target)
plt.plot(x, y_up, x, y_down)
plt.plot(x, y, c='g')[<matplotlib.lines.Line2D at 0xca79cf8>]
2、SVM分离坐标点
导包
# 基于半径的内核 kernel='rbf'
svc = SVC(kernel='rbf')创造-3到3范围的点以及meshgrid
data = np.random.randn(300,2)
plt.scatter(data[:,0], data[:,1])<matplotlib.collections.PathCollection at 0x13363630>
创造模型:rbf,训练数据
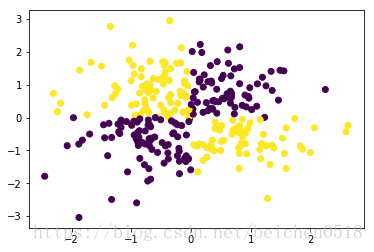
# xor 异或 假如值是一个序列 ,用每个序列中相同的下标做对比
# 第一象限和第三象限 x轴y轴符号相同
# 第二象限和第四象限 x轴y轴符号相异
np.logical_xor([1,0],[1,0])输出
array([False, False])
target = np.logical_xor(data[:,0]>0, data[:,1]>0)# target
# 让第一象限和第三象限是一类,让第二象限和第四象限是一类
plt.scatter(data[:,0], data[:,1], c=target)<matplotlib.collections.PathCollection at 0x134adda0>
X_train = data
y_train = target
svc.fit(X_train,y_train)输出
SVC(C=1.0, cache_size=200, class_weight=None, coef0=0.0,
decision_function_shape=’ovr’, degree=3, gamma=’auto’, kernel=’rbf’,
max_iter=-1, probability=False, random_state=None, shrinking=True,
tol=0.001, verbose=False)
# 缺的多个点
x_x = np.linspace(-3.3, 3, 500)
y_y = np.linspace(-3.3, 3.3, 500)
# 网格线
xx, yy = np.meshgrid(x_x, y_y)
# np.c 将x轴和y轴融合成点
# ravel 展开 也就是降成一维的数组
xy = np.c_[xx.ravel(), yy.ravel()]svc.predict(xy)输出
array([False, False, False, …, False, False, False])
# 样本X超平面的距离
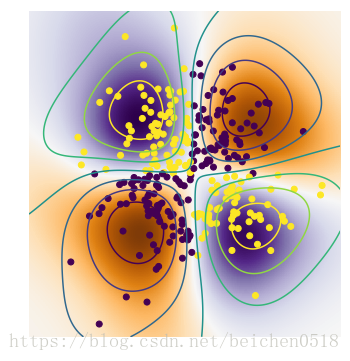
z = svc.decision_function(xy)绘制图形
绘制测试点到分离超平面的距离(decision_function)
绘制轮廓线
绘制训练点
# imshow 画图的数据是二维的
# extent 选取轴的范围, 它的值是一个序列, 必须成对出现
plt.figure(figsize=(6,6))
plt.imshow(z.reshape(500, 500), extent=[-3.3, 3,-3.3, 3.3], cmap=plt.cm.PuOr_r)
plt.scatter(data[:,0], data[:,1], c=target)
# contour 是一个三维的绘制 轮廓线
plt.contour(xx,yy, z.reshape(500, 500))
plt.axis('off')输出
(-3.3, 3.0, -3.3, 3.3)
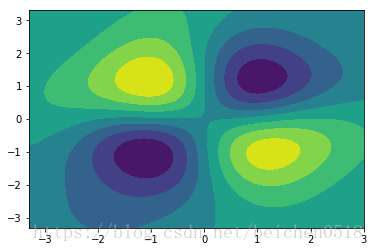
# 是一个三维的绘制 轮廓面
plt.contourf(xx,yy, z.reshape(500, 500))<matplotlib.contour.QuadContourSet at 0x10368a20>
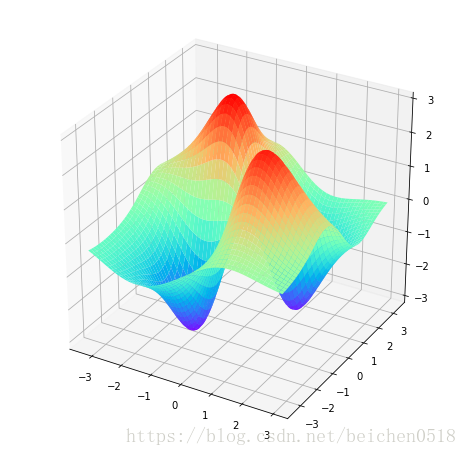
# 画个3d图
plt.figure(figsize=(8,8))
axes3d = plt.subplot(projection='3d')
axes3d.plot_surface(xx,yy,z.reshape(500,500),cmap='rainbow')<mpl_toolkits.mplot3d.art3d.Poly3DCollection at 0x12f93d68>
3、使用多种核函数对iris数据集进行分类
导包
import sklearn.datasets as datasetsiris = datasets.load_iris()
# 鸢尾花有四个属性,也就是四个维度
提取数据只提取两个特征,方便画图
创建支持向量机的模型:’linear’, ‘poly’(多项式), ‘rbf’(Radial Basis Function:基于半径函数),
X_train = iris['data'][:,:2]
y_train = iris['target']
svc_linear = SVC(kernel='linear')
svc_poly = SVC(kernel='poly')
svc_rbf = SVC(kernel='rbf') 训练模型
svc_linear.fit(X_train,y_train)
svc_poly.fit(X_train,y_train)
svc_rbf.fit(X_train,y_train)输出
SVC(C=1.0, cache_size=200, class_weight=None, coef0=0.0,
decision_function_shape=’ovr’, degree=3, gamma=’auto’, kernel=’rbf’,
max_iter=-1, probability=False, random_state=None, shrinking=True,
tol=0.001, verbose=False)
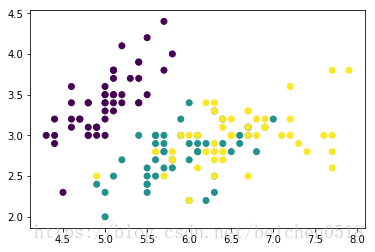
图片背景点
plt.scatter(X_train[:,0],X_train[:,1],c=y_train)<matplotlib.collections.PathCollection at 0x111cecc0>
xx, yy = np.meshgrid(np.linspace(4, 8, 300), np.linspace(1.9,4.5,300))
xy = np.c_[xx.ravel(),yy.ravel()]# 预测
linear_y_ = svc_linear.predict(xy)
poly_y_ = svc_poly.predict(xy)
rbf_y_ = svc_rbf.predict(xy)# 绘制图形
plt.figure(figsize=(12,10))
axes = plt.subplot(2,2,1)
axes.contourf(xx, yy, linear_y_.reshape(300, 300), cmap='cool')
axes.scatter(X_train[:,0],X_train[:,1],c=y_train, cmap='gray')
# axes.scatter(xx.ravel(), yy.ravel(), c = linear_y_)
axes = plt.subplot(2,2,2)
axes.contourf(xx, yy, poly_y_.reshape(300, 300), cmap='cool')
axes.scatter(X_train[:,0],X_train[:,1],c=y_train, cmap='gray')
axes = plt.subplot(2,2,3)
axes.contourf(xx, yy, rbf_y_.reshape(300, 300), cmap='cool')
axes.scatter(X_train[:,0],X_train[:,1],c=y_train, cmap='gray')<matplotlib.collections.PathCollection at 0x16f77da0>
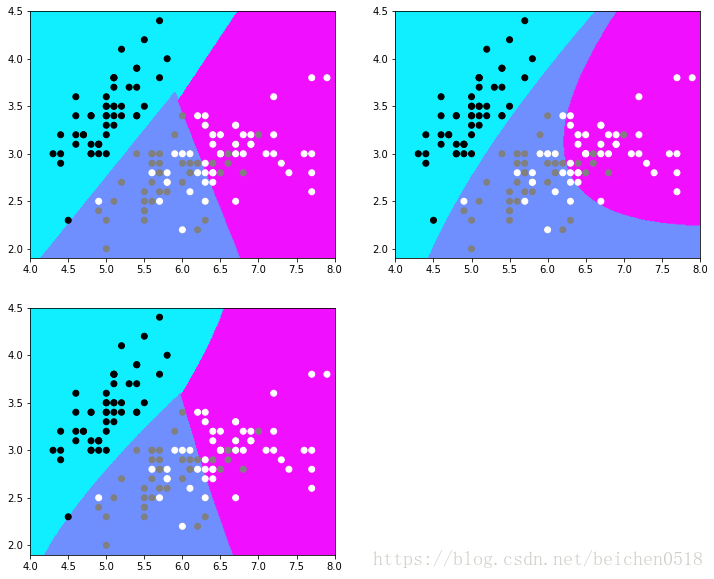
svc_linear.score(X_train,y_train)输出
0.82
svc_poly.score(X_train,y_train)输出
0.8133333333333334
svc_rbf.score(X_train,y_train)输出
0.8266666666666667
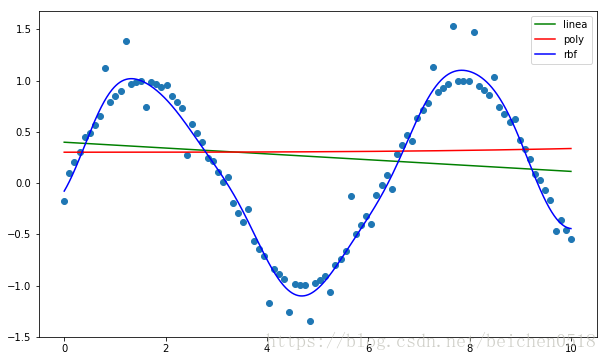
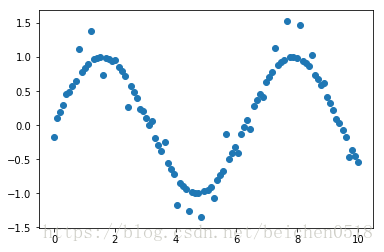
4、使用SVM多种核函数进行回归
导包
from sklearn.svm import SVR自定义样本点rand,并且生成sin值
# 生成一个正弦波
X_train = np.linspace(0, 10, 100).reshape(-1,1)
y_train = np.sin(X_train)数据加噪
y_train[::4] += np.random.randn(25,1) * 0.3plt.scatter(X_train, y_train)<matplotlib.collections.PathCollection at 0x16547080>
# target都是一维的值
y_train.ravel().shape输出
(100,)
建立模型,训练数据,并预测数据,预测训练数据就行
svr_linear = SVR(kernel='linear')
svr_poly = SVR(kernel='poly')
svr_rbf = SVR(kernel='rbf')
svr_linear.fit(X_train, y_train)
svr_poly.fit(X_train, y_train)
svr_rbf.fit(X_train, y_train)输出
SVR(C=1.0, cache_size=200, coef0=0.0, degree=3, epsilon=0.1, gamma=’auto’,
kernel=’rbf’, max_iter=-1, shrinking=True, tol=0.001, verbose=False)
# 预测数据
X_test = np.linspace(0, 10, 1000).reshape(-1,1)linear_y_ = svr_linear.predict(X_test)
poly_y_ = svr_poly.predict(X_test)
rbf_y_ = svr_rbf.predict(X_test)绘制图形,观察三种支持向量机内核不同
plt.figure(figsize=(10,6))
plt.scatter(X_train, y_train)
plt.plot(X_test, linear_y_, c='g', label='linea')
plt.plot(X_test, poly_y_, c='r', label='poly')
plt.plot(X_test, rbf_y_, c='b', label='rbf')
plt.legend()<matplotlib.legend.Legend at 0x19b76c50>