1、旋转的四元数表示
空间中的旋转可用一个四元数来表述,如点 P(x,y,z) 绕向量 V(u,v,w) 旋转 ,此旋转过程可表示为四元数 Q $[\,\,cos( \frac{\theta}{2} ),\,sin( \frac{\theta}{2} )\cdot (u,v,w)\,]$ 。
2、基本旋转的四元数表示
空间中的三维旋转可视为绕三个基本轴的旋转组合叠加,绕 $x,y,z$ 三个基本轴旋转角度分别为 $ \phi,\theta,\psi$ ,则三个基本旋转的四元素可表征为:

3、复合旋转的四元数表示
绕三个基本轴的旋转次序不同,其表征的空间旋转也不同,下面给出顺序为 ZYX、XYZ 时的结果及相应推导过程。
3.1 对于 ZYX ,其表征的旋转过程定义为:

且已知四元数,可以反求欧拉角

3.2 对于 XYZ ,其表征的旋转过程定义为:

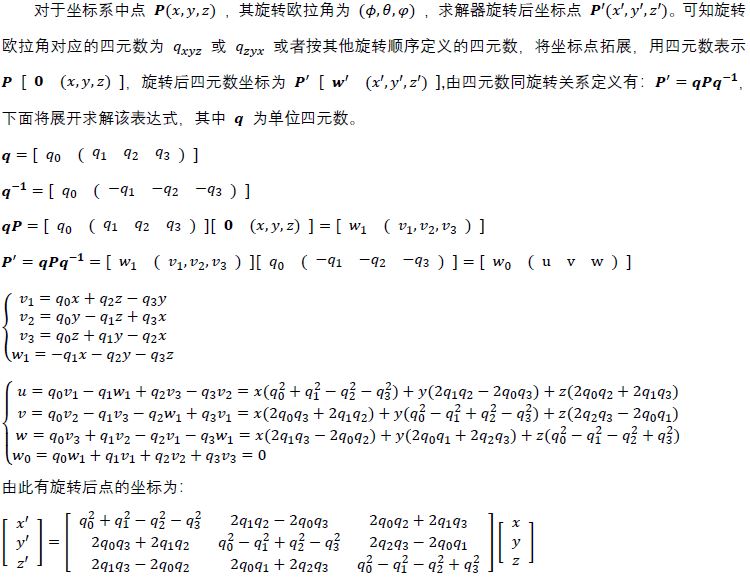
4、空间点旋转表示
5、空间点旋转的逆过程
对于坐标系中点 P( x,y,z ) ,其旋转欧拉角为 $ (\,\phi,\theta,\psi\,)$ ,按照 ZYX 顺序旋转后坐标点为 P'( x',y',z' ) ,完成 P 到 P’ 转换过程,其逆过程,即 P’ 到 P 的变换则按照欧拉角 $ (\,-\phi,-\theta,-\psi\,)$,的顺序进行。