一、复数
首先介绍复数的思路(虚数为复数的一部分)



而复数平面的创建并不是由上述的定义直观得来的,而是人们发现用复数系统来描述平面由以下优越性:
1.用复数形式表示二维坐标的时候,保留了横轴和纵轴的坐标信息。
2.虚数i可以表示90度旋转。
3.当把复数平面中某个点绕原点旋转时,可以用一个复数来表示旋转角度


二、四元数

2.1四元数的定义及运算法则
“四元数的运算有乘积、点乘,没有定义叉乘。而四元数乘积中利用到四元数的 哈密顿定义式 ,而在四元数乘积简化表达式中利用到了 向量的点乘和叉乘 ”









2.2利用单位四元数对三维空间内的点进行旋转
当然一般的四元数也可以旋转,但利用单元四元数是为了使旋转后该点的模不变,或者说到原点的距离不变。






1.运算产生的结果也要是三维向量
2.存在一个元运算,任何三维向量进行元运算的结果就是其本身
3.对于任何一个运算,都存在一个逆运算,这两个运算的积是元运算
4.运算满足结合律
其实,四元数有四个变量,完全可以被看作一个四维向量。,四元数
乘以四元数
其实看作(1)对
进行
左旋转,或者(2)对
进行
右旋转。所以从始至终,四元数定义的都是四维旋转,而不是三维旋转!任意的四维旋转都可以唯一的拆分为一个左旋转和一个右旋转,表达出来就是
。这里,我们对四元数(四维向量)
进行了一个
左旋转和一个
右旋转。结果当然是一个四元数,符合性质1。这个运算也同时符合性质2,3,4。(单位四元数(norm=1)则存在于四维空间的一个球面上。)
好了,说完了四维旋转,我们终于可以说说三维旋转了。说白了,三维旋转就是四维旋转的一个特例,就像二维旋转是三维旋转的一个特例一样。说是特例其实不准确,准确的说是一个子集或者subgroup。为了进行三维旋转运算,汉密尔顿首先在四维空间里划出了一块三维空间。汉密尔顿定义了一种纯四元数(pure quaternion),其表达式为。纯四元数第一项为零,它存在于四维空间的三维超平面上,与三维空间中的三维向量一一对应。然后,就有了我们常见的
这种左乘单位四元数,右乘其共轭的表达式。我真心不知道汉密尔顿是怎么想出来的,不过回过头来看,这个运算形式是为了限制其运算结果所在的空间。简单的说,当对一个三维向量进行三维旋转后,我们希望得到的是一个三维向量。(如果你真能得到一个四维向量,就不敢自己在家转圈圈了吧,转着转着,就进入四次元了!)那么这个左乘单位四元数,右乘其共轭的运算保证了结果是一个在三维超平面上中的纯四元数。
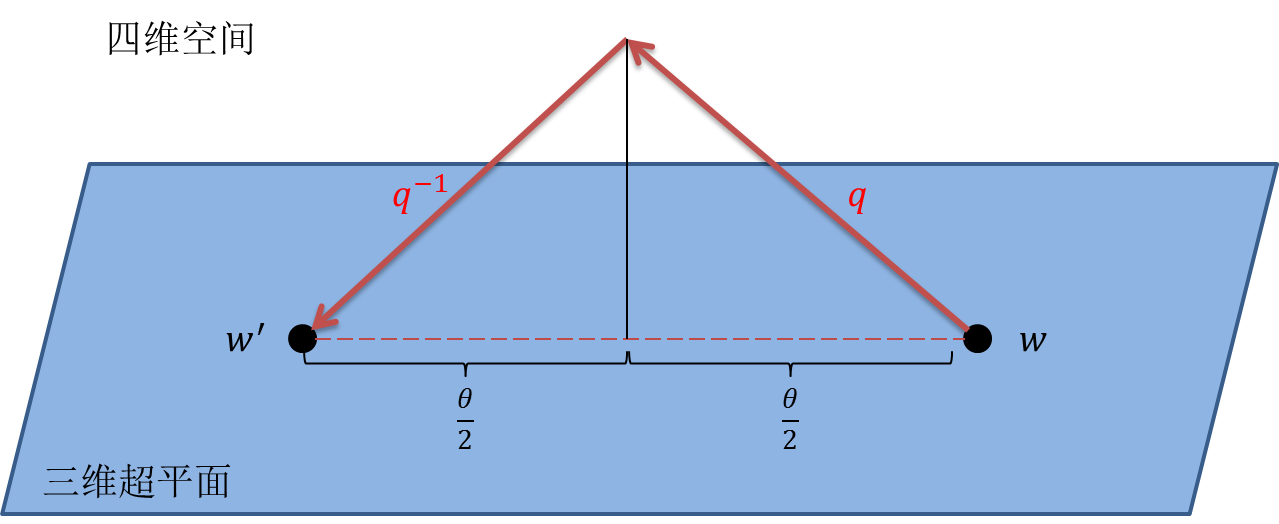
其实这张图解释了一个长久的疑问。为什么四元数里用的是
而不是
。这是因为
做的就是一个
的旋转,而
也做了一个
的旋转。我们进行了两次旋转,而不是一次。第一次旋转将三维超平面的点旋转出了该平面,第二次又把这个点旋回到该平面。这两次旋转的结果是一个旋转角为
的旋转。
转载:
1.http://www.qiujiawei.com/understanding-quaternions/#4.3
2.https://www.zhihu.com/question/23005815/answer/33971127
3.http://www.qiujiawei.com/understanding-quaternions/#4.3