The Trusted Intelligent System Team of the Institute of Software, Chinese Academy of Sciences has made progress in the construction of an open source self-driving system platform and built an open, easy-to-use, autonomous and controllable self-driving algorithm development, testing, simulation and verification platform ISS. This achievement is supported by the "Trusted Intelligent Algorithm in an Open Environment" project of the Chinese Academy of Sciences' stable support for young teams in the field of basic research.
According to the introduction, the ISS platform is based on a modular framework and implements dozens of benchmark algorithms covering the entire process of autonomous driving (including perception, mapping, positioning, prediction, planning and control, etc.) with less dependency on libraries (as shown in the figure) (shown in 1), is simple to use and easy to expand, and can provide basic platform support for researchers to conduct research related to autonomous driving.
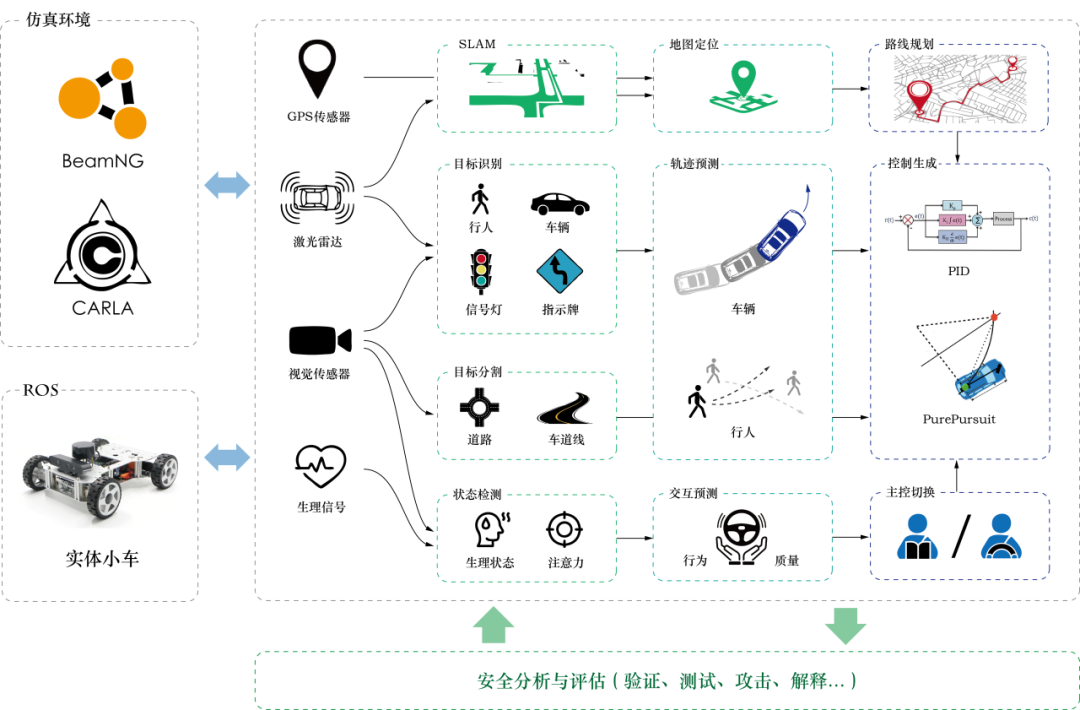
Figure 1. ISS platform architecture
The ISS platform specifically implements the following six module functions.
- Sensor module: Commonly used sensors are supported based on the CARLA simulator;
- Perception module: Based on deep learning methods, it implements perception tasks such as 2D detection, 2D semantic segmentation, Bev map generation, and 3D target detection;
- Prediction module: realizes uniform motion prediction and prediction based on Motion Transformer;
- Positioning module: realizes single-sensor positioning based on lidar, inertial measurement unit, global positioning system, etc., and multi-sensor fusion positioning based on filters such as Kalman filter;
- Planning module: Implements the FloodFill route planning algorithm based on Lanelet2, the rule-based behavior planning algorithm, and the motion planning algorithm based on Lattice Planner and EM Planner;
- Control module: implements the classic PID and MPC control algorithms.
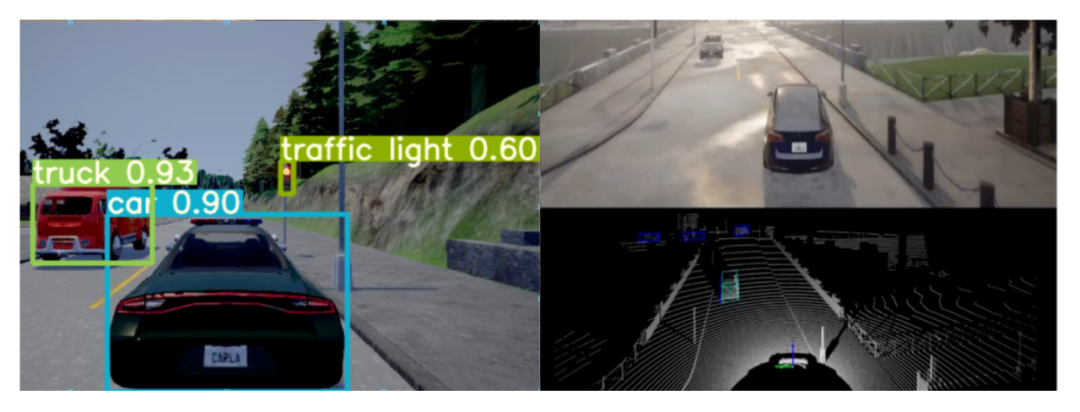
Figure 2. 2D and 3D perception effects of the ISS platform on the CARLA simulation platform
At present, scientific research teams from well-known domestic and foreign universities such as the National University of Defense Technology, Southwest University, Austria Digital Security Laboratory, and Saarland University in Germany have used the ISS platform to conduct research.
The Trusted Intelligent System Team of the Software Institute will continue to expand and improve the functions of each module of the ISS platform, including adding functions such as autonomous driving interpretability analysis, safety verification, physical car and joint simulation. The ISS platform is expected to become an influential open source basic support platform in this field, providing support for domestic and foreign research teams in areas such as autonomous driving and trustworthy artificial intelligence.