缓和曲线参数再推导
〇、前言
在20世纪90年代之前,我国的高速公路还没有大规模建设,公路建设基本以二、三级甚至更低等级的公路为主,因此测量放样采用以前教科书上的切线支距法、偏角法等已经可以满足测量精度和工期的需要。随着20世纪80年代末90年代初高速公路建设事业的兴起,公路平面线型设计多样化,线型组合复杂,加之建设进度要求加快,相应精度要求也比普通公路要高,切线支距法、偏角法等已经不能满足测量精度和工期的需求了。因此必须采用坐标法精确计算平曲线上任意点的坐标,然后再采用坐标法进行放样。在计算坐标的过程当中,直线和圆曲线的计算方法简单,难点在于计算缓和曲线上任意点的坐标。在我国的公路、铁路工程平曲线设计中,普遍采用辐射螺旋线(又称回旋曲线)作为缓和曲线的线型计算模型(因此以下的缓和曲线均指回旋曲线)。为了计算缓和曲线上任意点的坐标,我们有必要从缓和曲线特性来推导出其代表参数的计算公式,进而为坐标的精确计算提供基础依据。
一、缓和曲线特性
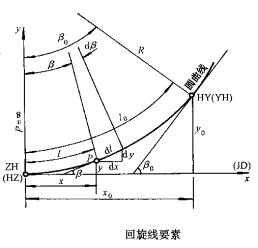
对于完整缓和曲线,设起点为ZH点,其半径r=∞,设终点为HY点,其半径r=R,起终点间缓和曲线全长为Ls;设p为缓和曲线上任意一点,曲率半径为r,该点至起点的曲线长度为l,根据回旋线特性:回旋线是半径与曲线长度成反比的曲线,则rl=RLs=C。其中C为常数,称为回旋线半径变化率,为今后计算方便,引入回旋曲线参数A,令A2=C。即当缓和曲线终点圆曲线半径(回旋线曲率半径)R及回旋线长度Ls已知时,C及A即可唯一确定。
二、缓和曲线参数计算
- 回旋曲线参数A的计算:根据前述缓和曲线特性,已经得出回旋曲线参数A的计算公式即:A2=C=rl=RLs。
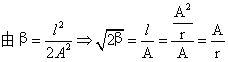
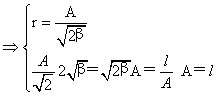
- 回旋线中心角(缓和曲线角)的计算:根据几何关系可知,回旋线上任意点p与缓和曲线起点之间的曲线长度l所对应的曲线中心角β即切线角,与p点切线与起点切线之间的夹角相等。在该p点取一微分弧段dl,所对应的中心角为dβ,于是有:

~~ ~~
则当l=Ls即缓和曲线终点处对应的缓和曲线圆心角为:
β0= - 局部坐标参数计算 :
建立以ZH点为原点,过该点的切线为x轴,法线为y轴的坐标系,则回旋线上任意点p的坐标为x,y,在该p点取一微分弧段dl,其在坐标轴上的投影分别为dx,dy,则有:
而cos(β)和sin(β)的级数展开公式分别为:
(注:i=0从第一项1开始)
(注:i=0从第一项β开始)
则有:
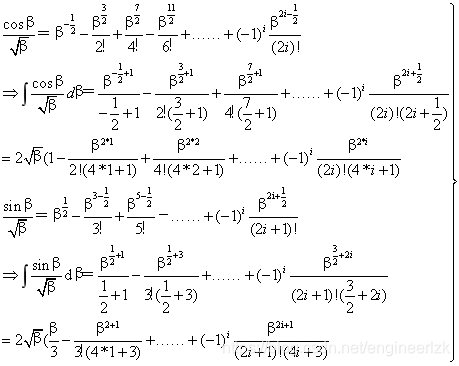
将其入前述x,y的积分公式即可求出x,y的数值公式:
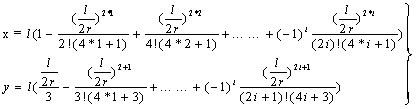
将 代入得:
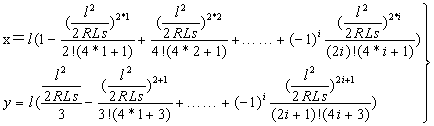
由前式即可在已知R,Ls以及缓和曲线任意点p至起点缓和曲线长l的情况下计算p点的坐标,然后再通过坐标平移转换即可求出该点在全局坐标系下的坐标X,Y;由 即可求出p点的缓和曲线角,切线方位角也可由缓和曲线起点切线方位角+β的方式计算出来。至此,缓和曲线上任意点的坐标及方位角计算公式已推导完毕。
从该式我们可以看出,如果在x值计算时取i=1,则 ,在y值计算时取i=0,则 ,此两公式即为我们在教科书以及各种参考书上普遍见到的x,y值计算公式,也就是舍弃了高次项的近似公式表达式。
为了描述方便,我们假定两个参数:
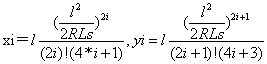
测量施工人员可以根据设计精度要求(在实际施工测量中,若坐标精度达到1mm则完全满足规范和相关控制需求),通过判断前述两个参数xi、yi的值是否小于精度要求值来确定x、y参数计算所需取的项数。 - 曲线内移距p和切线增长值q的计算 :
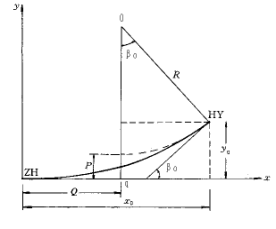
由几何特性可知,p=y-r(1-cosβ),q=x-rsinβ,将x、y、cosβ、sinβ的级数展开式代入并合并同类项后(推导过程略)得到:
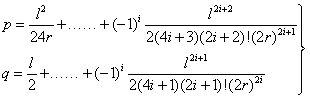
为了防止在计算过程中

数值溢出,也可将前述公式修改为:
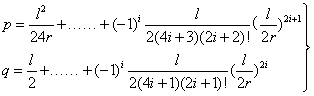
当i取值0时, 也是我们在教科书以及各种参考书上普遍见到的p,q值计算公式,也就是舍弃了高次项的近似公式表达式。
同理,为了描述方便,我们假定pi,qi两个参数,测量施工人员可以根据设计精度要求(在实际施工测量中,若坐标精度达到1mm则完全满足规范和相关控制需求),通过判断下述两个参数pi、qi的值是否小于精度要求值来确定p、q参数计算所需取的项数。

