虽然不久前就知道能将模型直接导入,但是并没有找到一个比较详细的教程,ros wiki上的官方教程比较模糊,经过我的摸索,这里给大家详细介绍一下,希望能够帮到大家,缩短学习和开发的时间。
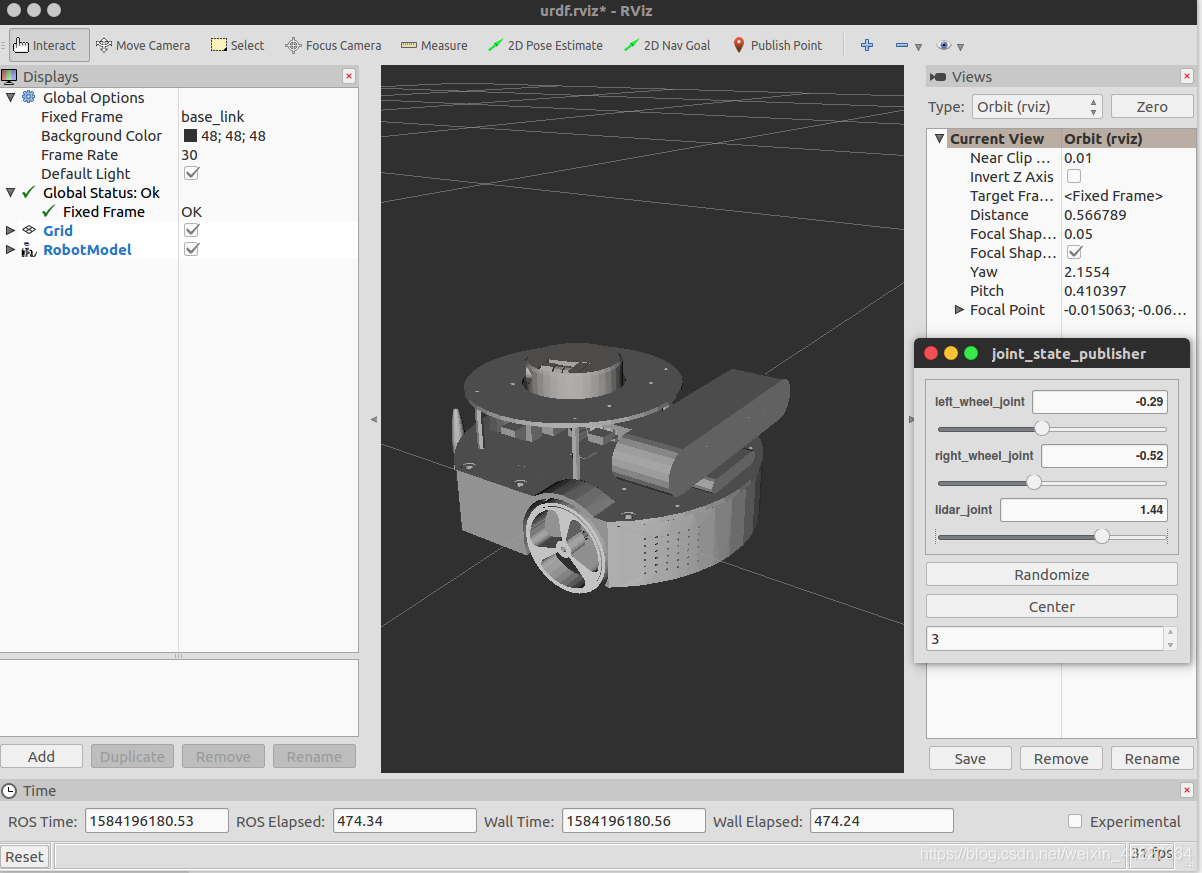
先给大家看一下效果:

这里需要一个插件,这个还是要到官网下载为好,直接安装,不用自己设置目录,很方便。直接Google搜索sw_urdf_exporter,进入wiki下载插件就行。
我的模型是在inventor中建立的,转成stp模式才导进的solidworks,但是一点都不影响接下来的操作。
像我的轮式小车,就需要设置以下轮子转动的基准轴,在solidworks的 插入/参考几何体/基准轴
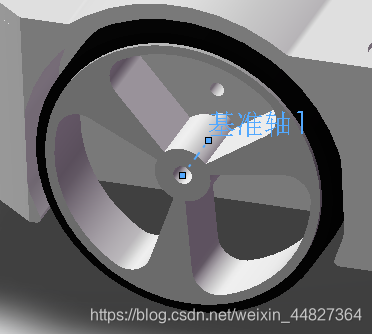
把我们需要转动的都要设置一个基准轴。
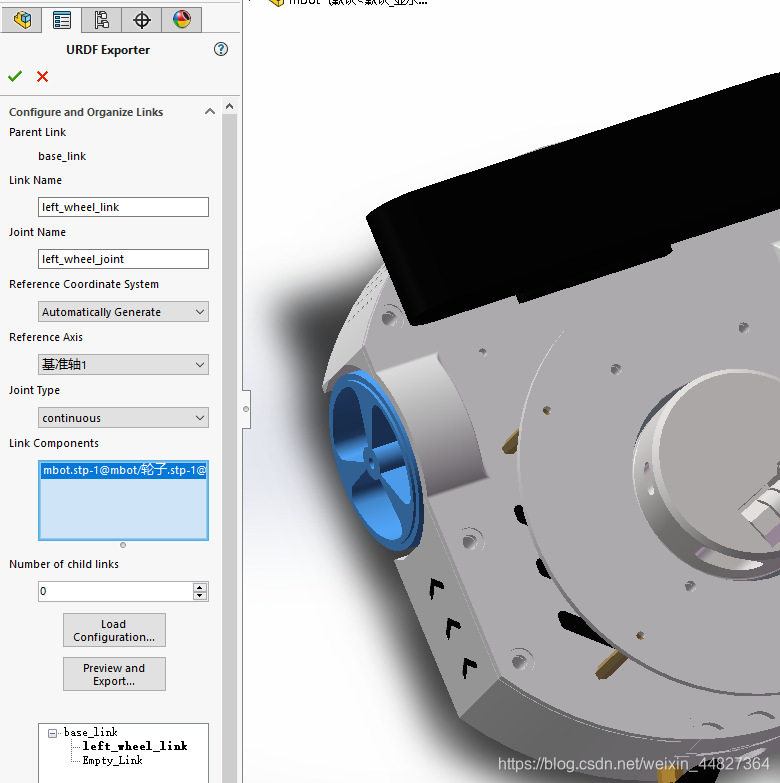
然后在这里打开我们的sw_urdf_exporter插件

然后像这样设置我们link和jiont参数,以及选择我们的link
注意child link和parent的关系
在做这个之前最好学习好urdf模型,这些参数很重要。熟悉了这些参数才好配置,要是这些参数都不知道是啥,那就很难了,这里对于参数不多解释。
定义关节类型,可选项有:
revolute - 旋转关节,其极限位置由 upper and lower limits 决定
continuous - 旋转关节,无位置限制
prismatic - 滑动关节,其极限位置由 upper and lower limits 决定
fixed - 虚拟关节,关节不可运动
floating - 六自由度关节
planar - 平面关节
轮子就用continuous!
然后点击Preview and Export…就可以了,最后检查一遍我们的参数,有的时候会有一点错误,这时候就需要我们手动再修改以下。
将文件导出后,我们就得到一个这样的文件夹:

将这个文件夹放在工作空间的src目录下就可以了,记得编译
这个插件目前好像已经修复了一些错误,插件已经配置好了launch文件,不出错的话基本上就能roslaunch打开了。
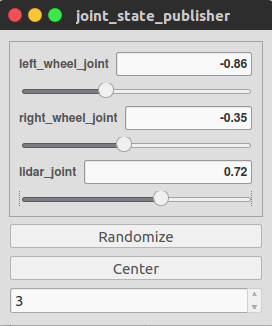
再launch文件夹中,打开display.launch修改一个参数来调出一个工具条
将下面的参数改成True

再roslaunch就可以进入rviz了。
fixed frame要选base_link
然后Add出RobotModel模块
就可以正常使用我们的模型了,可以做一些仿真,也让我们的界面更加美观!