1. 龙伯格状态观测器概念
已经线性系统模型如下:
当系统状态量难以获取,但实际控制中又需要利用系统状态量时,如何通过输入量和输出量重构系统状态量?这便是龙伯格状态观测器设计初衷,将实现系统状态的系统称为状态观测器。
为确保估计状态逼近系统真实状态
,需满足如下条件:
其中,称为
的重构状态或者状态估计值。
2. 状态观测器设计
假设系统状态观测量和输出观测量满足如下方程:
龙伯格状态观测器模型:
其中,A为状态矩阵,B为输入矩阵,C为输出矩阵,L为观测器增益矩阵,对偏差的加权。
(1)状态估计的开环处理
若采用开环控制实现状态估计,其系统结构如图1所示,该系统模型简单,但存在模型不确定性和扰动,初始状态未知等问题。
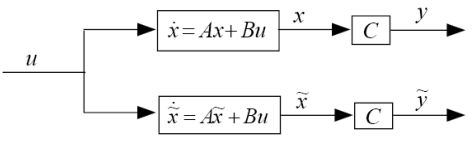
图1 基于开环控制的状态观测器实现
(2)状态估计的闭环处理
为提高系统的抗干扰性能,故采用闭环控制来实现状态估计,根据输出误差控制状态误差,使得估计状态和真实状态之间的误差逐步减小,其系统结构图如图2所示。

图2 基于闭环控制的状态观测器实现
定义真实状态和估计状态的误差向量如下:
则误差的动态行为为:
由上式可知,矩阵(A-LC)的极点决定了误差是否衰减以及如何衰减,而对于一个已知系统,A和C由系统特性决定。因此,增益矩阵L成为系统是否稳定的关键,这一问题被成为系统的极点配置问题。若能使得矩阵 A - LC 具有适当的特征值,则可以使得误差具有一定的衰减率。
由于
因此,问题转化为的极点配置问题,该极点配置问题可解的充要条件为:
完全能控
完全能观
观测器的增益矩阵可以按照极点配置方法来设计求解的极点配置问题,得到增益矩阵K;观测器增益矩阵
。观测器设计的三种方法:直接法、变换法、爱克曼公式。
3. 状态观测器实例
考虑由以下系数矩阵给定的系统
,
,
设计一个观测器,使观测器两个极点都是-2。
方法一:直接法
解:(1)检验系统的能观性:
系统是能观的,因此问题可解。
(2) 要求确定观测器增益矩阵 ,使得矩阵
具有两个相同的特征值-2。由于
(3)期望的特征值多项式是
比较两个多项式,可以得到,
所求的观测器是
方法二:爱克曼公式
%% 利用MATLAB中的acker函数求解状态观测器
% 作者:Peng Jin
% 时间:2019年2月19日
%%
clc
clear all
close all
% 系统矩阵
A = [0 1; -1,0];
B = [1;0];
C = [1 0];
% 期望的极点
P = [-2;-2];
% 判断系统是否完全能观
E_obs = obsv(A,C); % 求解能观性矩阵
E_val = rank(E_obs); % 根据能控性矩阵是否满秩判断能观性
L_acker = (acker(A',C',P))'; % 利用acker求状态增益矩阵L