查看opencv版本
pkg-config --modversion opencv
1、安装桌面完整版的ROS kinetic(Desktop-Full),其中kinetic默认版本为opencv3
2、安装OpenCV库和相关的接口功能包:
sudo apt-get install ros-kinetic-vision-opencv libopencv-dev python-opencv ros-kinetic-opencv3
ROS使用安装在系统中的独立OpenCV库。为了能在节点中使用它,必须在package. xml文件中指定一个编译和运行需要的opencv2依赖包:
<build_depend>opencv3</build_depend>
<run_depend>opencv3</run_depend>
需要在CMakeLists.xml加入下面一行:
find_package(OpenCV)
include_directories(${catkin_INCLUDE_DIRS} ${OpenCV_INCLUDE_DIRS})
然后,对于每个使用OpenCV的库或可执行文件,必须在target_link_libraries中增加${OpenCV_LIBS}
在节点的cpp文件中,要包含所需的所有OpenCV库。例如,使用以下声明来包含highgui.hpp文件:
#include <opencv3/highgui/highgui.hpp>
3、在CLlion中新建opencv工程,其中CMakeLists.txt的opencv配置如下:
find_package( OpenCV REQUIRED )
include_directories( ${OpenCV_INCLUDE_DIRS} )
target_link_libraries( imageBasics ${OpenCV_LIBS} )
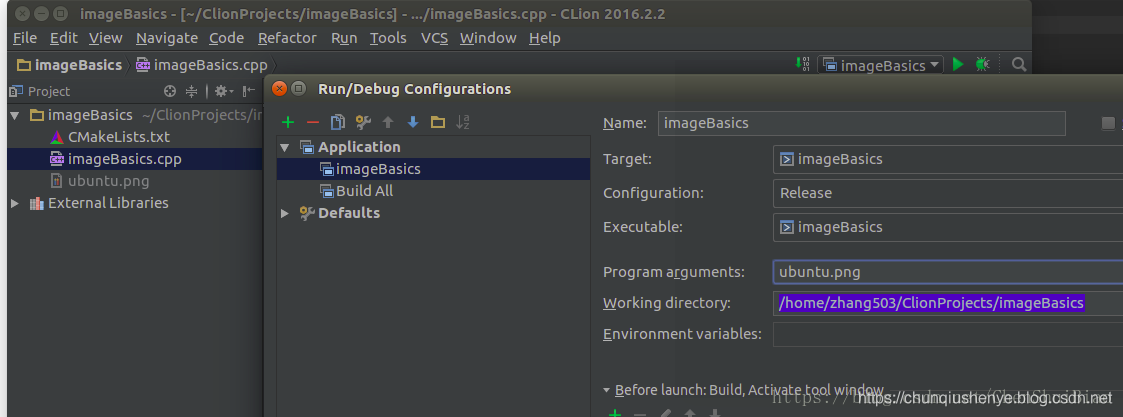
4、上面已经完成了CLion工程的配置,但如果opencv3中工程要运行载入图片,
则还要配置CLion图片参数(Program arguments)和工程的运行路径(Working directory):
在这里我的图片名字为:“Ubuntu.png”和 蓝色为运行工程路径
参考资料
https://blog.csdn.net/ChenShuiBiao/article/details/81063696
