A-star算法
搜索技术
搜索技术是一种通用的问题求解技术,可以将待解决的问题转化为可搜索的问题空间,然后在该空间中搜索求解。搜索技术在人工智能领域有着非常广泛的应用.
盲目搜索
盲目搜索是最简单的搜索方法,如宽度优先搜索和深度优先搜索,这种搜索方法效率非常低,只适用于非常简单的问题求解。
骑士旅行问题: 我们在6×6的棋盘上用国际象棋中的骑士遍历整个棋盘并回到出发点,这个看似并不复杂的问题如果用盲目搜索求解,可能需要好几天的时间。
启发式搜索
启发式搜索: 通过问题的特征信息引导搜索过程,减小搜索范围,从而提高搜索效率。还以上面提到的骑士旅行问题为例,使用启发式搜索方法,普通笔记本求解只需要20分钟,计算效率得到了几百倍的提升。
A-star算法
A*(A-Star)算法是一种静态路网中求解最短路径最有效的直接搜索方法,也是解决许多搜索问题的有效算法。算法中的距离估算值与实际值越接近,最终搜索速度越快。
简单例子看启发式搜索
题目
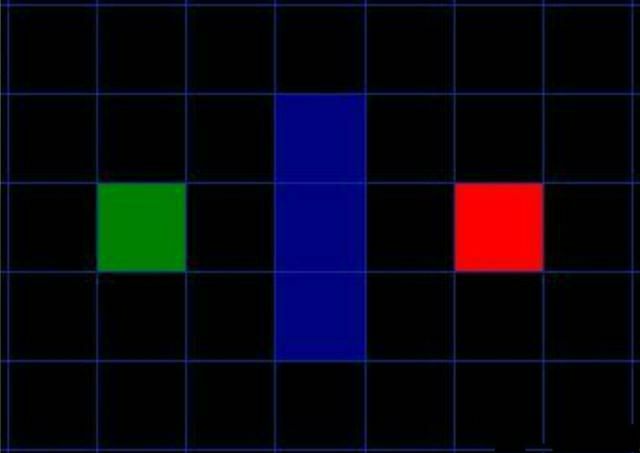
- 绿色方块是起点,红色方块是终点,蓝色的方块是障碍物,求起点到终点的最短路径。
- 规则:每次只能移动一格,可以往8个方向移动.
- 移动水平或竖直方向移动代价为10,斜向移动代价为14.
- 从起点到终点总的移动代价最小的路径即为最短路径。
分析
- 盲目搜索的思路是遍历每一种可能的路径,显然绝大部分路径都是无用的,比如在这个例子中首先往左侧移动是肯定无法得到最短路径的。
- A*算法的思路是在所有可能的下一步子结点中进行试探性的搜索,寻找最佳结点。
- 判断最佳结点的公式:
F = G + H G表示起点到子结点的代价。
H表示子结点到终点的预估代价。
注意这里H是预估代价,我们可以使用曼哈顿距离来计算:H = 10( |x 1-x 2| + |y 1-y 2| )
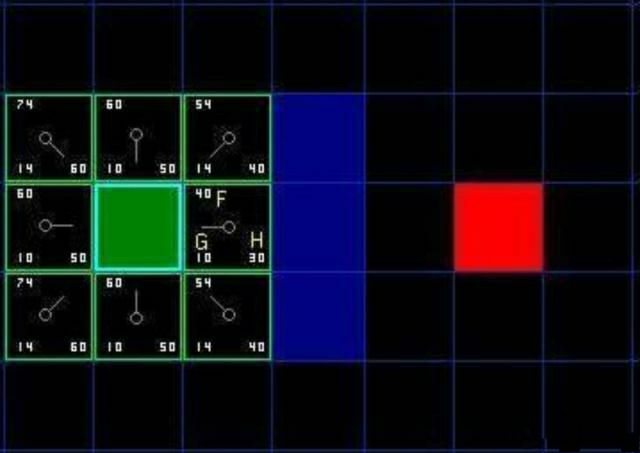
上图计算了起点的所有子节点的F值(左上角)、G值(左下角)、H值(右下角).
- 显然右侧的子结点F值最小,我们把它作为最佳结点A.
- 继续下一步的搜索。对于当前节点来说,共有4个可能的子结点,右侧蓝色障碍物无法移动,左侧绿色结点为起点,不必走回头路。经过计算,上方(或下方)的结点的F值最小,可以当作最佳结点B.
- 此时我们发现:由结点A到结点B的F值要大于从起点到结点B的F值,我们需要重新选择从起点移动到结点B作为第一步,A*算法就是通过这种原理实现路径的不断优化。
